逆解专题
多轴机械臂/正逆解/轨迹规划/机器人运动学/Matlab/DH法 学习记录03——机械臂运动学逆解
系列文章目录 本科毕设正在做多轴机械臂相关的内容,这里是一个学习机械臂运动学课程的相关记录。 如有任何问题,可发邮件至layraliu@foxmail.com问询。 1. 数学基础 2. 机械臂几何法与DH表示法 3. 机械臂运动学逆解 文章目录 系列文章目录一、引言1.手臂顺向运动学forward kinematics(FK)2.手臂逆向运动学inverse kinematics(IK

机械臂运动学逆解(牛顿法)
机械臂运动学逆解(牛顿法) 常用的工业6轴机械臂采用6轴串联结构,虽然其运动学正解比较容易,但是其运动学逆解非常复杂,其逆解的方程组高度非线性,且难以化简。 由于计算机技术的发展,依靠其强大的算力,可以通过数值解的方式对机械臂的运动学逆解方程组进行求解。以下将使用牛顿法详解整个求解过程。 算法的过程 机械臂运动学正解方程组如式1所示。 [ f 11 f 12 f 13 f 14
【xr806开发板试用】XR806联调stm32控制并联四足马术机器人单腿运动学逆解与整体步态规划
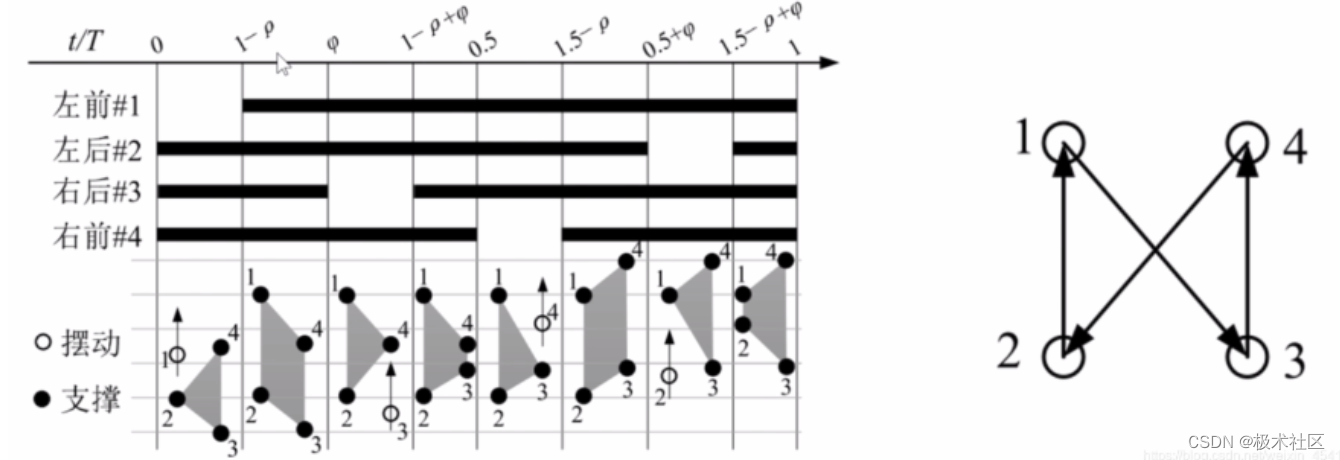
一、项目介绍 使用RX806串口协议与大疆A板的stm32通讯,实现并联四足机器人的单腿运动学逆解与整体步态规划。 实物图 二、涉及相关算法 1.单腿运动学逆解 控制2个无刷电机(红色箭头各代表一个电机控制)并联成单足,经过角度闭环解算出足端轨迹,由足端做摆线轨迹(下图中绿色部分)形成类似于动物猫狗等单腿的运动 %摆线方程(matlab
【matlab与机器人】PUMA560运动学逆解
经观察,PUMA560机器人的逆解在任何参考书中均一致。自己推了一遍,matlab代码使用了 基于Matlab的PUMA 560运动学与轨迹规划仿真 - 灰信网(软件开发博客聚合) (freesion.com) 的参考代码。经实验,该段代码能够正确回推各个θ角度。 下面先总结推导过程中用到的一般方法与思路,供迁移到其他机器人的建模上使用。 方法1:构造sinx与cosx的函数,使用
matlab + 3轴机器人、3轴机械臂求逆解、使用xyz求逆解
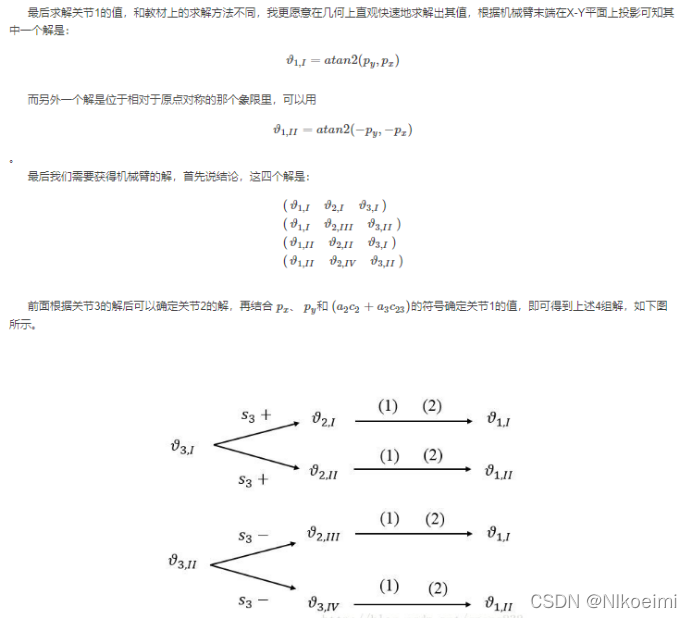
关于3轴仅使用xyz位置坐标求逆解,我查阅的关于3轴求逆解的文章比较简略,没有具体代码实现过程,以及算法,我根据别人文章的思路,结合自己机械臂的需求,整理了一下求解过程以及代码实现过程。图示为常见的 3轴机械臂 文章目录 3轴机械臂求逆解的方法1.几何法(使用的方法)2.解析法(提供解法) 一、几何法1.建立3轴映射模型2.数学求解3.matlab实现4.求解β的过程(1)函数

六轴机器人matlab写运动学逆解函数(改进DH模型)
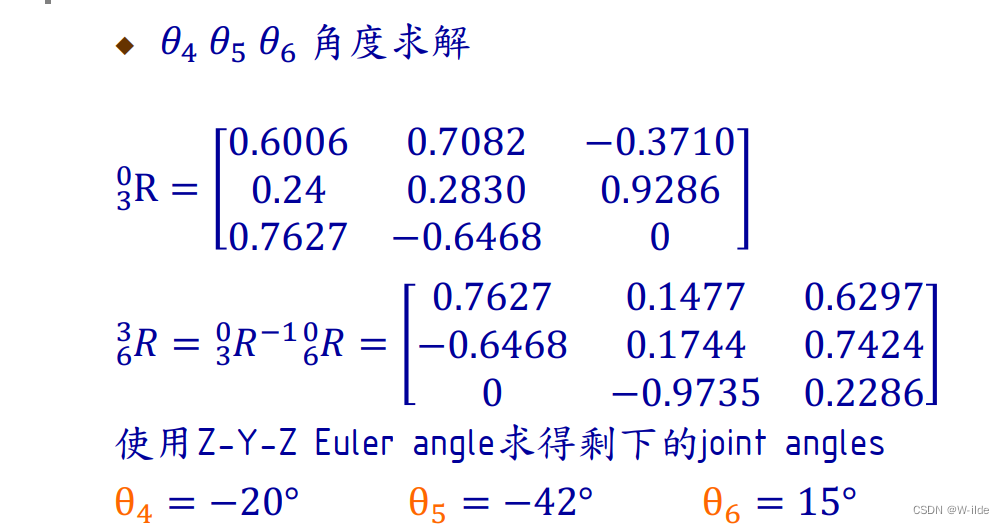
1.理论 本文采用的模型为之前博客“matlab机器人工具箱一般六轴的DH模型和改进DH模型建立与区别”里面的改进DH模型,参数不再重复给出。 基系与工具坐标系关系为: bT0⋅(0T1⋅1T2⋅2T3⋅3T4⋅4T5⋅5T6)⋅6Te=bTe b T 0 ⋅ ( 0 T 1 ⋅ 1 T 2 ⋅ 2 T 3 ⋅ 3 T 4 ⋅ 4 T 5 ⋅ 5 T 6 ) ⋅ 6 T e = b T

Stewart六自由度正解、逆解计算-C#和Matlab程序
目录 一、Stewart并联六自由度正解计算 (一)概况 (二)Matlab正解计算 1、参考程序一 2、参考程序二 (三)C#程序正解计算 1、工程下载链接 2、正解运行计算 (四)正程序打包下载程序合集 二、逆解计算 (一)Matlab逆解计算 1、Matlab逆解计算程序一 2、Matlab逆解计算程序二 3、Matlab逆解计算程序三 (二)C