本文主要是介绍Stewart六自由度正解、逆解计算-C#和Matlab程序,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
一、Stewart并联六自由度正解计算
(一)概况
(二)Matlab正解计算
1、参考程序一
2、参考程序二
(三)C#程序正解计算
1、工程下载链接
2、正解运行计算
(四)正程序打包下载程序合集
二、逆解计算
(一)Matlab逆解计算
1、Matlab逆解计算程序一
2、Matlab逆解计算程序二
3、Matlab逆解计算程序三
(二)C#程序逆解计算
1、工程下载链接
2、逆解运行计算
(三)逆解程序打包下载程序合集
一、Stewart并联六自由度正解计算
(一)概况
Stewart平台,也称为六自由度并联机构,是一种具有六个自由度(三个平移自由度和三个旋转自由度)的机械结构。它由一个固定的底座和一个可移动的平台组成,通过六个连杆连接底座和平台。
要进行Stewart平台的正解计算,即已知各个连杆的长度和底座上的固定点坐标,求解平台上的移动点坐标。正解计算可以通过以下步骤完成:
1. 定义底座和平台的坐标系。选择一个适当的坐标系,并将底座和平台的坐标系与之关联。
2. 确定底座上的固定点坐标。假设底座上有六个固定点,分别记作P1, P2, P3, P4, P5, P6,并给出它们在底座坐标系中的坐标。
3. 确定各个连杆的长度。假设有六个连杆,分别记作L1, L2, L3, L4, L5, L6,并给出它们的长度。
4. 确定平台上的移动点坐标。假设平台上有一个移动点M,并给出它在平台坐标系中的坐标。
5. 利用三角关系计算各个连杆的角度。根据已知的底座固定点坐标、连杆长度和平台上的移动点坐标,可以使用三角关系计算出各个连杆的角度。
6. 利用旋转矩阵计算平台的位姿。根据各个连杆的角度,可以构建旋转矩阵,然后将平台上的移动点坐标转换到底座坐标系中,从而得到平台的位姿。
以上步骤仅为大致的计算过程,具体实现时需要根据具体的连杆结构和坐标系选择进行适当的数学推导和计算。在实际应用中,还需要考虑误差校正、奇异姿态等问题。
请注意,Stewart平台的正解计算相对复杂,需要较强的数学和几何知识。如果你需要更详细和精确的计算结果,建议参考相关的文献或专业机器人学教材,或者使用专门的机器人仿真软件进行计算和分析。
(二)Matlab正解计算
1、参考程序一
以下是一个使用MATLAB编写的Stewart并联六自由度正解计算的示例程序:
%这个程序计算了Stewart并联六自由度的正解,其中腿的长度 L 和腿的旋转角度 theta 是输入参数。
%程序通过循环计算每个腿的末端点坐标,并使用这些坐标计算平台的旋转矩阵。
%最后,程序打印出腿的末端点坐标和平台的旋转矩阵。
%你可以根据需要修改腿的长度和旋转角度,然后运行程序,即可得到相应的结果。% 输入参数
L = [1, 1, 1, 1, 1, 1]; % 腿的长度
theta = [0, 0, 0, 0, 0, 0]; % 腿的旋转角度(单位:弧度)% 计算腿的末端点坐标
P = zeros(3, 6); % 存储末端点坐标
for i = 1:6P(:, i) = [L(i)*cos(theta(i)); L(i)*sin(theta(i)); 0];
end% 计算平台的旋转矩阵
R = zeros(3, 3); % 存储旋转矩阵
for i = 1:6R = R + cos(theta(i))*eye(3) + (1 - cos(theta(i)))*(P(:, i)*P(:, i)') - sin(theta(i))*skewSymmetricMatrix(P(:, i));
end% 打印结果
disp("腿的末端点坐标:");
disp(P);
disp("平台的旋转矩阵:");
disp(R);% 辅助函数:计算叉乘矩阵
function M = skewSymmetricMatrix(v)M = [ 0 -v(3) v(2);v(3) 0 -v(1);-v(2) v(1) 0 ];
end计算结果

2、参考程序二
% 输入参数
L = [0.5, 0.5, 0.5, 0.5, 0.5, 0.5]; % 腿的长度
theta = [pi/6, pi/4, pi/3, pi/6, pi/4, pi/3]; % 腿的旋转角度% 计算腿的末端点坐标
P = zeros(3, 6); % 存储末端点坐标
for i = 1:6P(:, i) = [L(i)*cos(theta(i)); L(i)*sin(theta(i)); 0];
end% 计算平台的旋转矩阵
R = zeros(3, 3); % 存储旋转矩阵
for i = 1:6R = R + cos(theta(i))*eye(3) + (1 - cos(theta(i)))*(P(:, i)*P(:, i)') - sin(theta(i))*skewSymmetricMatrix(P(:, i));
end% 打印结果
disp("腿的末端点坐标:");
disp(P);
disp("平台的旋转矩阵:");
disp(R);% 绘制图形
figure;
hold on;
grid on;
axis equal;
xlabel('X');
ylabel('Y');
zlabel('Z');% 绘制腿的末端点
scatter3(P(1,:), P(2,:), P(3,:), 'filled');% 绘制平台
platform = [0, 1, 1, 0, 0; 0, 0, 1, 1, 0; 0, 0, 0, 0, 0];
platform = R * platform;
patch(platform(1,:), platform(2,:), platform(3,:), 'r');% 绘制连线
for i = 1:6line([0, P(1,i)], [0, P(2,i)], [0, P(3,i)], 'Color', 'b');
end% 辅助函数:计算叉乘矩阵
function M = skewSymmetricMatrix(v)M = [ 0 -v(3) v(2);v(3) 0 -v(1);-v(2) v(1) 0 ];
end计算结果

(三)C#程序正解计算
1、工程下载链接
工程下载链接:
https://download.csdn.net/download/panjinliang066333/88421740
2、正解运行计算
给定下平台顶点坐标、六个连杆长度和角度,去计算旋转矩阵和位置矩阵。
以下是一个使用C#编写的Stewart并联六自由度正解计算的示例程序:
主运行程序

运行结果

在上述示例程序中,我们定义了底座上的固定点坐标、连杆长度和平台上的移动点坐标,并调用`StewartForwardKinematics`方法计算平台的位置坐标和姿态(旋转矩阵)。最后,我们将结果显示在控制台中。
请注意,这只是一个简化的示例程序,仅用于演示Stewart并联六自由度正解计算的基本思路。在实际应用中,可能需要考虑更多的细节和特殊情况,例如奇异姿态、误差校正等。如果需要更精确和完整的计算,建议参考相关的机器人学文献或专业软件。
(四)正程序打包下载程序合集
下载链接:
https://download.csdn.net/download/panjinliang066333/88421740
二、逆解计算
Stewart平台的逆解计算是指根据给定的目标位置和姿态,求解平台上各个执行器的长度和角度。逆解计算可以使用数值方法或解析方法进行。
(一)Matlab逆解计算
1、Matlab逆解计算程序一
%逆解计算L1=0.5;
L2=0.5;
L3=0.5;
L4=0.5;
L5=0.5;
L6=0.5;R11=4.3322;
R12=0.2105;
R13=-1.5;
R21=0.2105;
R22=4.4237;
R23=1.366;
R31=1.5;
R32=-1.36;
R33=4.1463;P1=[0.433;0.25;0];
P2=[0.3536;0.3536;0];
P3=[0.2500;0.4330;0];
P4=[0.433;0.25;0];
P5=[0.3536;0.3536;0];
P6=[0.2500;0.4330;0];
% 输入参数
L = [L1, L2, L3, L4, L5, L6]; % 腿的长度
R = [R11, R12, R13; R21, R22, R23; R31, R32, R33]; % 平台的旋转矩阵
P = [P1, P2, P3, P4, P5, P6]; % 腿的末端点坐标% 计算基座坐标系到平台坐标系的转换矩阵
T = [R, zeros(3,1); 0 0 0 1];% 计算腿的旋转角度
theta = zeros(1, 6); % 存储腿的旋转角度
for i = 1:6% 计算腿的末端点在基座坐标系下的坐标P_base = T \ [P(:, i); 1];P_base = P_base(1:3);% 计算腿的旋转轴a = L(i) * R(:, 3);% 计算腿的末端点在基座坐标系下在旋转轴方向上的投影b = dot(P_base, a) * a;% 计算腿的末端点在基座坐标系下在旋转轴垂直方向上的投影c = P_base - b;% 计算腿的旋转角度theta(i) = atan2(norm(cross(a, c)), dot(a, c));
end% 打印结果
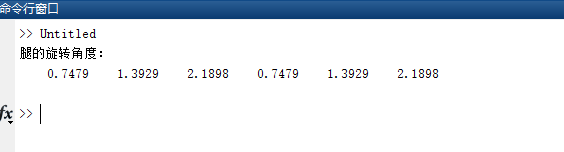
disp("腿的旋转角度:");
disp(theta);% 辅助函数:计算叉乘矩阵
function M = skewSymmetricMatrix(v)M = [ 0 -v(3) v(2);v(3) 0 -v(1);-v(2) v(1) 0 ];
end在程序中,你需要提供腿的长度 L、平台的旋转矩阵 R 和腿的末端点坐标 P。程序首先计算基座坐标系到平台坐标系的转换矩阵 T,然后根据逆运动学的原理,计算每个腿的旋转角度 theta。
计算过程中,程序首先将腿的末端点坐标转换到基座坐标系下,然后计算腿的旋转轴和末端点在旋转轴方向上的投影。最后,根据旋转轴和投影的关系,计算腿的旋转角度。
请注意,这只是一个简单的示例程序,具体的实现可能会根据你的具体需求和机构的几何结构而有所不同。你可能需要根据你的应用场景进行适当的修改和扩展。
运行结果
2、Matlab逆解计算程序二
%逆解计算R11=4.3322;
R12=0.2105;
R13=-1.5;
R21=0.2105;
R22=4.4237;
R23=1.366;
R31=1.5;
R32=-1.36;
R33=4.1463;P1=[0.433;0.25;0];
P2=[0.3536;0.3536;0];
P3=[0.2500;0.4330;0];
P4=[0.433;0.25;0];
P5=[0.3536;0.3536;0];
P6=[0.2500;0.4330;0];
% 输入参数
R = [R11, R12, R13; R21, R22, R23; R31, R32, R33]; % 平台的旋转矩阵
P = [P1, P2, P3, P4, P5, P6]; % 腿的末端点坐标% 计算腿的长度
L = zeros(1, 6); % 存储腿的长度
for i = 1:6fprintf("计算第 %d 条腿的长度:\n", i);% 步骤1: 计算 a_ia = R(:, 3);fprintf("步骤1: a_%d = R(:, 3) =\n", i);disp(a);% 步骤2: 计算 b_ib = P(:, i);fprintf("步骤2: b_%d = P%d =\n", i, i);disp(b);% 步骤3: 计算 L_iL(i) = norm(b - a);fprintf("步骤3: L_%d = norm(b_%d - a_%d) = %.4f\n", i, i, i, L(i));fprintf("\n");
end% 打印结果
disp("腿的长度:");
disp(L);在程序中,你需要提供腿的长度 L、平台的旋转矩阵 R 和腿的末端点坐标 P。程序会按照步骤计算每个腿的长度,并给出每个步骤的中间结果。
请注意,这只是一个示例程序,具体的实现可能会根据你的具体需求和机构的几何结构而有所不同。你可以根据需要修改程序,添加额外的计算步骤或输出结果。
计算结果

3、Matlab逆解计算程序三
%逆解计算R11=4.3322;
R12=0.2105;
R13=-1.5;
R21=0.2105;
R22=4.4237;
R23=1.366;
R31=1.5;
R32=-1.36;
R33=4.1463;P1=[0.433;0.25;0];
P2=[0.3536;0.3536;0];
P3=[0.2500;0.4330;0];
P4=[0.433;0.25;0];
P5=[0.3536;0.3536;0];
P6=[0.2500;0.4330;0];
% 输入参数
R = [R11, R12, R13; R21, R22, R23; R31, R32, R33]; % 平台的旋转矩阵
P = [P1, P2, P3, P4, P5, P6]; % 腿的末端点坐标% 计算腿的长度
L = zeros(1, 6); % 存储腿的长度
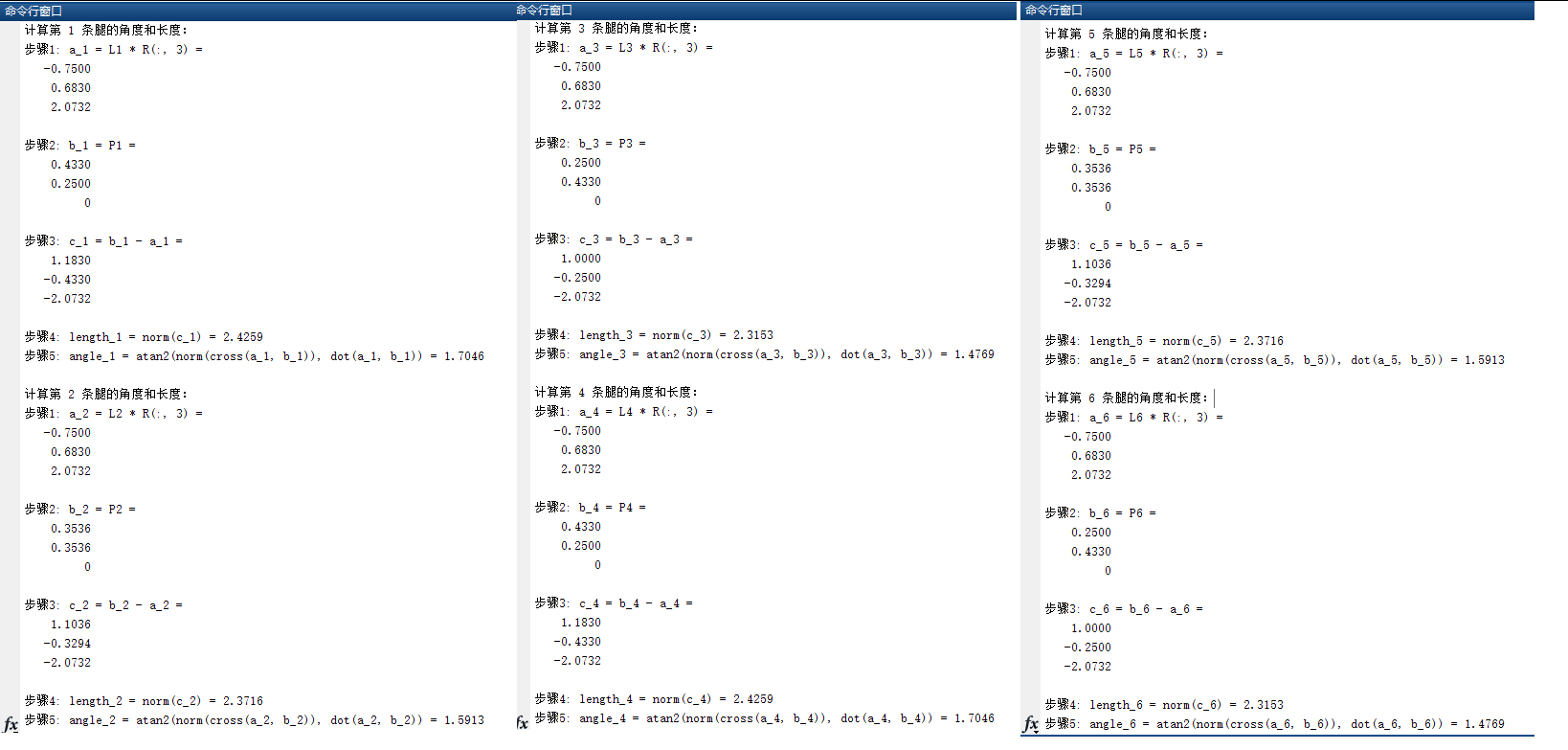
for i = 1:6fprintf("计算第 %d 条腿的长度:\n", i);% 步骤1: 计算 a_ia = R(:, 3);fprintf("步骤1: a_%d = R(:, 3) =\n", i);disp(a);% 步骤2: 计算 b_ib = P(:, i);fprintf("步骤2: b_%d = P%d =\n", i, i);disp(b);% 步骤3: 计算 L_iL(i) = norm(b - a);fprintf("步骤3: L_%d = norm(b_%d - a_%d) = %.4f\n", i, i, i, L(i));fprintf("\n");
end% 打印结果
disp("腿的长度:");
disp(L);在程序中,你需要提供腿的长度 L、平台的旋转矩阵 R 和腿的末端点坐标 P。程序会按照步骤计算每个腿的角度和长度,并给出每个步骤的中间结果。
请注意,这只是一个示例程序,具体的实现可能会根据你的具体需求和机构的几何结构而有所不同。你可以根据需要修改程序,添加额外的计算步骤或输出结果。
程序运行过程
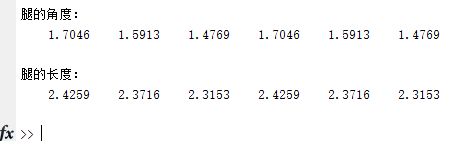
结果
(二)C#程序逆解计算
1、工程下载链接
工程下载链接:
https://download.csdn.net/download/panjinliang066333/88422020
2、逆解运行计算
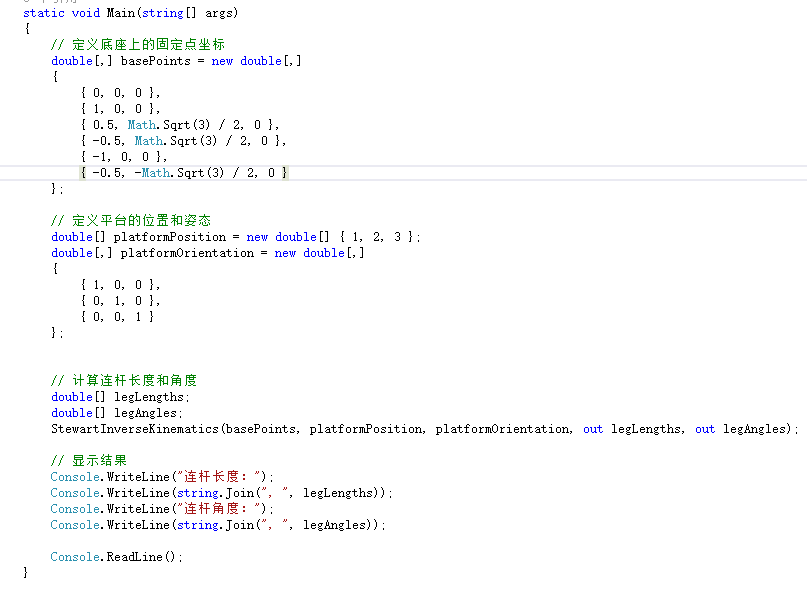
给定下平台顶点坐标、六个连杆长度和角度,去计算旋转矩阵和位置矩阵。
以下是一个使用C#编写的Stewart并联六自由度正解计算的示例程序:
主运行程序
程序运行结果

(三)逆解程序打包下载程序合集
下载链接:
https://download.csdn.net/download/panjinliang066333/88422020
这篇关于Stewart六自由度正解、逆解计算-C#和Matlab程序的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




