步态专题

人体行走步态周期转换为不同相位描述
目录 一、步行周期 二、相关论文描述 三、参考文献 一、步行周期 人体行走时的步态状态通常采用传感器进行判断,比如Dong Jin Hyun等[1]通过嵌入两个力感应电阻的鞋垫来估计的步行状态,其中一个检测脚趾接触,另一个检测脚后跟接触[5]。Conor James Walsh[3]基于外骨骼的角度和力传感器读数,实现了状态机控制策略。上述论文都是将连续步态离散化

步态识别论文Dynamic Aggregated Network for Gait Recognition(1)
摘要:步态识别在视频监控、犯罪现场侦查、社会安全等领域有着广泛的应用前景。然而,在实际场景中,步态识别往往受到多种外部因素的影响,如携带条件、穿着外套、视角多样等。近年来,各种基于深度学习的步态识别方法取得了可喜的成果,但它们倾向于使用固定权重的卷积网络提取显著特征之一,没有很好地考虑关键区域中步态特征之间的关系,忽略了完整运动模式的聚合。 在本文中,我们提出了一个新的观点,即实际的步态特征包括

步态控制之捕获点(Capture Point,CP)
捕获点(Capture Point,CP) 捕获点(Capture Point,CP)是机器人学中的一个重要概念,用于评估和控制机器人步态的稳定性。捕获点表示机器人需要踏出的下一步位置,以确保在动态条件下的稳定性。它特别适用于步态控制和动态行走控制。 应用捕获点进行步态控制 捕获点在步态控制中的应用主要包括: 步态生成:通过捕获点确定下一步的位置和时间,生成稳定的步态。平衡控制:实时计算捕
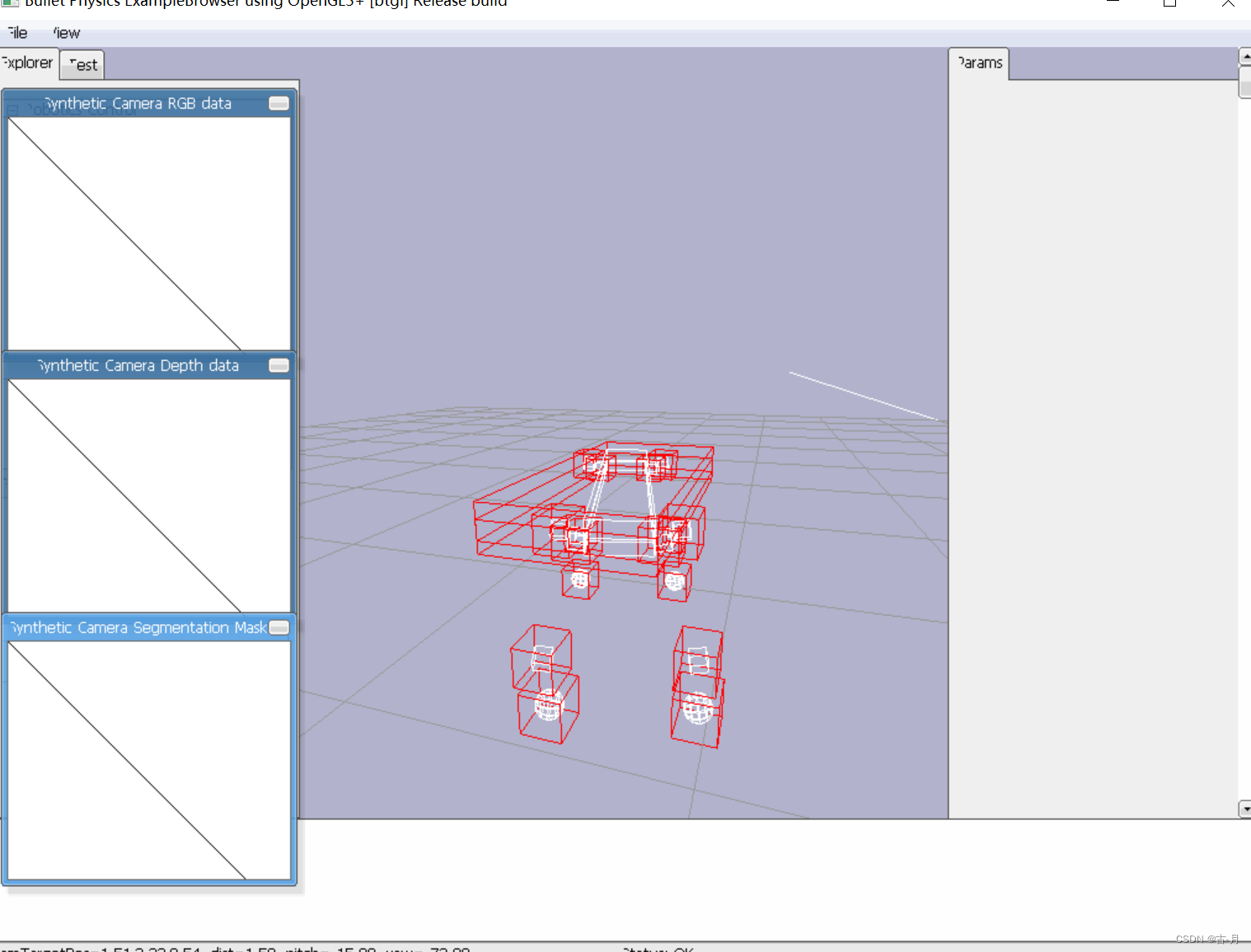
四足机器人步态仿真(二)PyBullet 机械臂运动学仿真(以绘制圆形路径为例)
观前提醒:本章主要内容是通过PyBullet仿真kuka机械臂,并控制机械臂末端按照预定轨迹运动 一、什么是运动学? 运动学是物理学的一个分支,专注于物体的运动描述,包括位移、速度、加速度等,而不考虑这些运动是如何产生的(即不考虑力和质量)。运动学可以应用在很多领域,包括机械工程、机器人学、生物力学等。 在机器人学中,运动学特别指的是机器人各个部件之间的运动关系。机器人的运动学可以分为两个主要
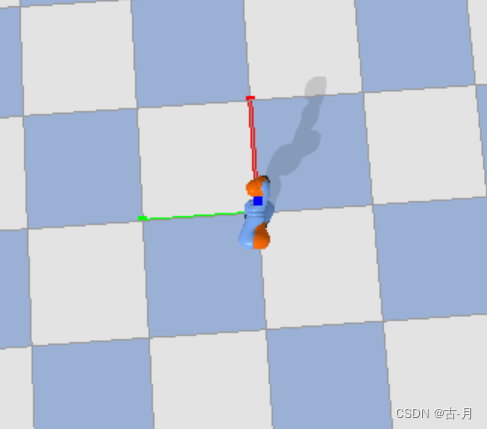
四足机器人步态仿真(三)四足机器人基础步态仿真
观前提醒,本章主要内容为分析四足机器人步态实现和姿态控制,碰撞体积等程序 步态效果: 一、完整代码如下 # -*- coding: utf-8 -*-import pybullet as pimport timeimport numpy as npp.connect(p.GUI)p.createCollisionShape(p.GEOM_PLANE)p.createMultiBody(0
步态识别论文(6)GaitDAN: Cross-view Gait Recognition via Adversarial Domain Adaptation
摘要: 视角变化导致步态外观存在显着差异。因此,识别跨视图场景中的步态是非常具有挑战性的。最近的方法要么在进行识别之前将步态从原始视图转换为目标视图,要么通过蛮力学习或解耦学习提取与相机视图无关的步态特征。然而,这些方法有许多约束,例如处理未知相机视图的难度。这项工作将视角变化问题视为域更改问题,并提出通过对抗性域适应来解决这个问题。这样,不同视角的步态信息被视为来自不同子域的数据。该方法侧重于

(5)步态识别论文研读——GaitDAN:基于对抗域适应的跨视角步态识别
GaitDAN: Cross-view Gait Recognition via Adversarial Domain Adaptation | IEEE Journals & Magazine | IEEE Xplore GaitDAN: Cross-view Gait Recognition via Adversarial Domain Adaptation 基于对抗与适应 摘要:视角变

在全志V853平台上成功部署深度学习步态识别算法
北理工通信课题组辛喆同学在本科毕业设计《基于嵌入式系统的步态识别的研究》中,成功将深度步态识别算法GaitSet移植到全志V853开发板上。本研究在CASIA-B数据集上进行测试,正常行走状态下该系统的步态识别准确率达到了94.9%,背包行走和穿外套行走条件下识别准确率分别达到了87.9%与71.0%。 步态识别作为一种新兴的生物识别方式,相比于人脸识别、指纹识别等方式,具有易于适应环境、无
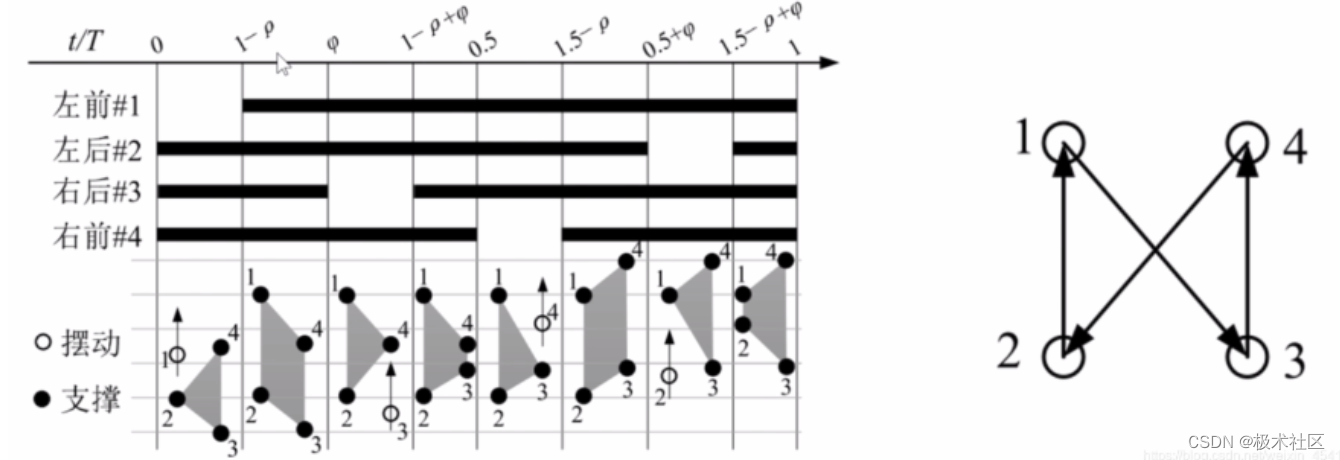
【xr806开发板试用】XR806联调stm32控制并联四足马术机器人单腿运动学逆解与整体步态规划
一、项目介绍 使用RX806串口协议与大疆A板的stm32通讯,实现并联四足机器人的单腿运动学逆解与整体步态规划。 实物图 二、涉及相关算法 1.单腿运动学逆解 控制2个无刷电机(红色箭头各代表一个电机控制)并联成单足,经过角度闭环解算出足端轨迹,由足端做摆线轨迹(下图中绿色部分)形成类似于动物猫狗等单腿的运动 %摆线方程(matlab

瑞士苏黎世联邦理工学院ETH Zurich:记录马匹不同步态和活动测量
——用于动物测量研究的数据记录仪:虹科MSR145 对马匹的运动活动和休息行为的观察通常用于评估其饲养和管理的安全与健康。研究测试了虹科MSR145数据记录仪在判别马匹步态方面的适用性。 作为直接观察这一耗时方法的替代方案,使用计步器是自动化活动测量的常用方法。然而,计步器的一个缺点是数据汇总而导致信息丢失,无法区分不同的步态。因此,苏黎世联邦理工学院农业科学研究所行为、健康和动物福利研
曼彻斯特大学和马德里大学的研究人员开发AI系统进行步态识别,准确识别个体
内容来源:ATYUN AI平台 研究者最近开发了一种新的人工智能,可以通过测量步态或步行模式来识别个人。该技术可用于机场安全,取代指纹识别和眼部扫描。它可以通过分析3D足迹和基于时间的数据来成功验证个人。由英国曼彻斯特大学和西班牙马德里大学的研究人员开发的系统几乎百分之百地正确识别出个体,仅有0.7的错误率。物理生物识别技术,如指纹,面部识别和视网膜扫描,目前更常用于安全目的。然而,所谓的

AI步态识别新应用——步态研判模型赋能公安系统
通过盈力科技步态识别技术在涉案视频分析研判中的高效运用,不仅将涉案视频分析研判水平和能力提升到新的高度,同时推动涉案视频录入的数量和质量大幅提升,使涉案视频在侦查破案中的运用效果再上一个新的台阶。 什么是步态识别技术? 步态识别技术是基于运动生理学、人体运动力学等学科原理,运用深度机器学习和神经网络算法,对人体步幅、步频、步宽、足部摆动周期、关节弯曲度、抬腿高度、摆臂周期等特征进行大数据智能化
外骨骼机器人(七):标准步态数据库
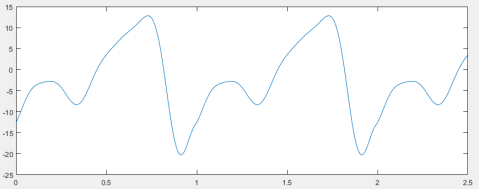
国际生物力学学会的生物力学数据资源索引网站中,这个网站里面包括了人体的运动数据、压力数据、肌肉骨骼模型数据等生物力学相关的数据,本文从这个网站中摘取下肢关节运动数据,并进行处理。分别介绍了如何从数据来源获取原始数据文件、如何从原始文件中提取有用的数据、如何处理原始数据使其成为平滑的轨迹。 一、数据来源 步态数据的来源:https://isbweb.org/dat
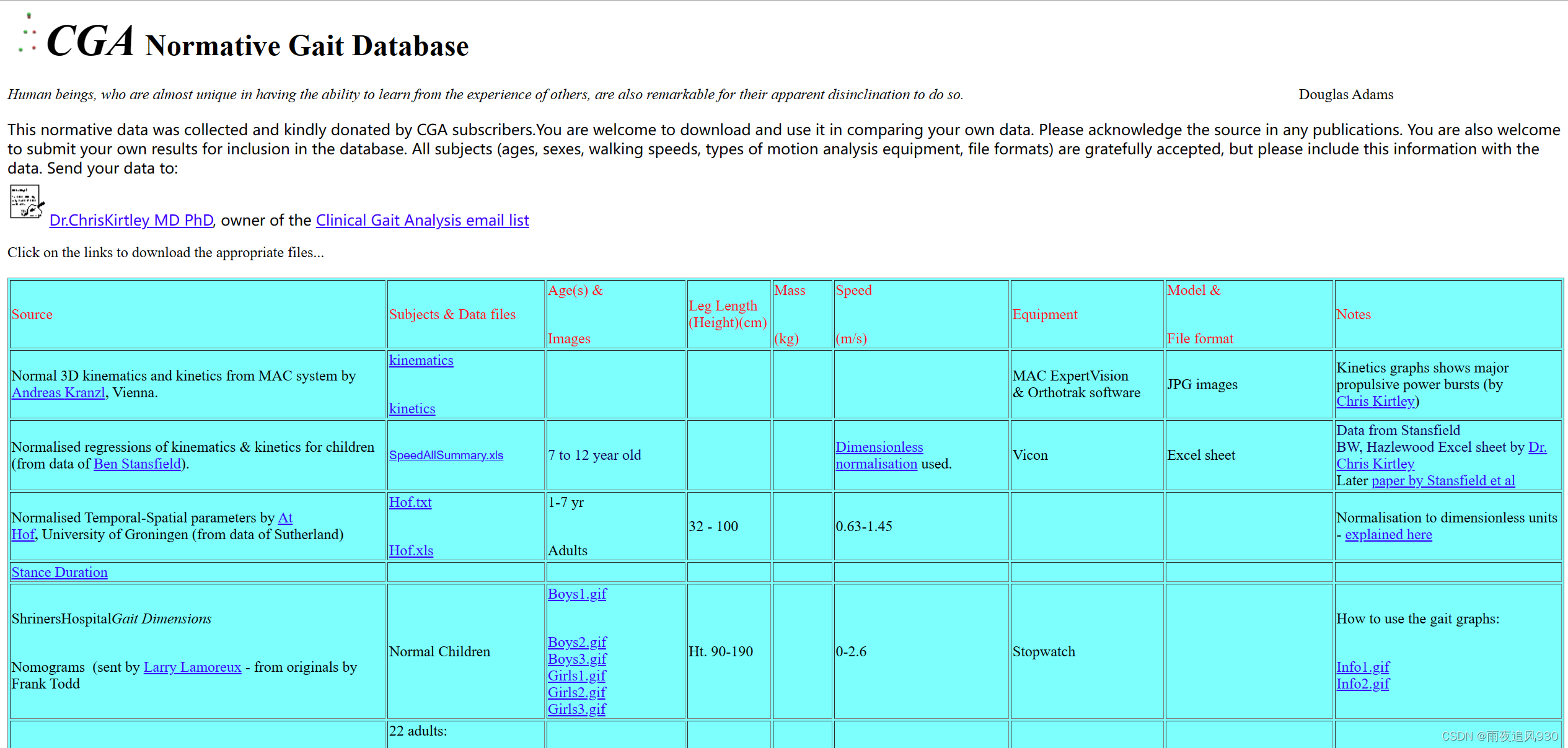
CGA步态数据库数据
CGA步态数据库数据 上图是该文件内容的截图。 下载链接:http://www.clinicalgaitanalysis.com/data/ 在上图【SpeedAllSummary.xls】这个文件里。