本文主要是介绍外骨骼机器人(七):标准步态数据库,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
国际生物力学学会的生物力学数据资源索引网站中,这个网站里面包括了人体的运动数据、压力数据、肌肉骨骼模型数据等生物力学相关的数据,本文从这个网站中摘取下肢关节运动数据,并进行处理。分别介绍了如何从数据来源获取原始数据文件、如何从原始文件中提取有用的数据、如何处理原始数据使其成为平滑的轨迹。
一、数据来源
步态数据的来源:https://isbweb.org/data/
这是国际生物力学学会的生物力学数据资源索引网站,这里面包括了运动数据、压力数据、肌肉骨骼模型数据等生物力学相关的数据,我们这里只看运动数据。

下载C3D TOOLS里面的Sample Gait Data,就可以下载C3Dgaitdata数据包,里面有三个.c3d格式文件,我们主要使用gait-pig.c3d。C3D文件格式提供了一种在文件中存储3D和模拟信息的常用方法,许多流行的运动捕捉系统都支持这种格式。
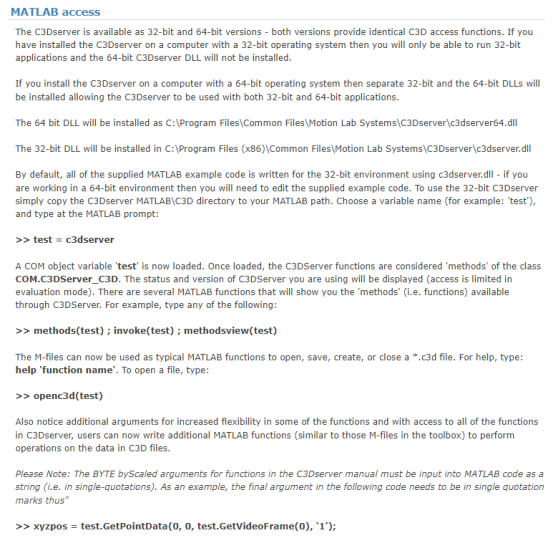
怎么打开c3d文件查看数据呢?在这个网站(https://www.c3d.org/c3dapps.html),找到MATLAB ASSCESS如下图,点C3Dserver链接,可以下载C3Dserver_setup.exe,然后按默认进行安装。
安装C3Dserver之后,打开VBC3DEditer软件,在这个软件里面打开gait-pig.c3d文件如下图所示:
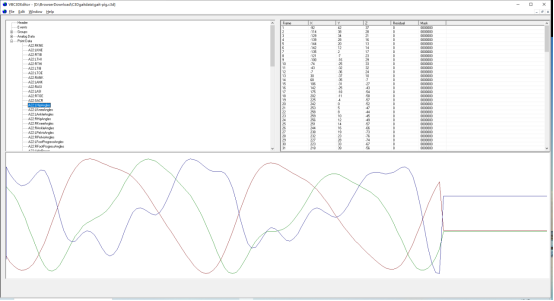
可以看到里面包含了左髋、左膝、左踝、右髋、右膝、右踝等关节角度信息。
在这个软件里面看数据不是很方便,可不可以在MATLAB里面读取C3D文件呢?当然可以,同样进入这个网站(https://www.c3d.org/c3dapps.html),点MATLAB ACCESS链接下载matlab工具压缩包,解压之后将该路径添加到matlab中。
然后就可以按照c3dserver(https://www.c3dserver.com/applications.html#MATLAB
)上的说明,在matlab中调用刚才那个工具包里的函数,读取到c3d文件里的数据。
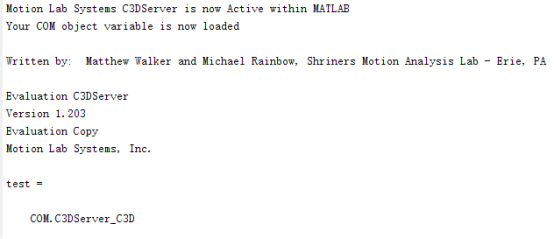
在matlab里面输入以下命令测试一下是否配置好:
>>test = c3dserver如果出现如下则说明C3D环境配置好了。
二、数据提取
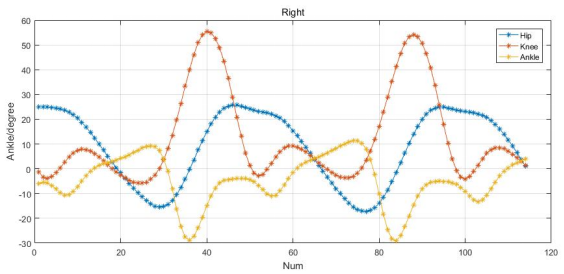
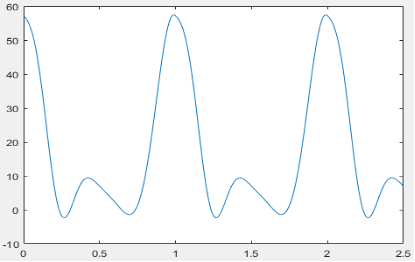
在Matlab中新建m文件,将下面的代码写进去,打开gait-pig.c3d文件,提取出左髋、左膝、左踝、右髋、右膝、右踝关节角度数据,并画出来看一下。
clc;
clear;test = c3dserver;openc3d(test);LH = 'A22:LHipAngles';
LK = 'A22:LKneeAngles';
LA = 'A22:LAnkleAngles';
LHA = get3dtarget(test, LH);
LKA = get3dtarget(test, LK);
LAA = get3dtarget(test, LA);RH = 'A22:RHipAngles';
RK = 'A22:RKneeAngles';
RA = 'A22:RAnkleAngles';
RHA = get3dtarget(test, RH);
RKA = get3dtarget(test, RK);
RAA = get3dtarget(test, RA);for i=1:114LHangle(i) = LHA(i,1);LKangle(i) = LKA(i,1);LAangle(i) = LAA(i,1);RHangle(i) = RHA(i,1);RKangle(i) = RKA(i,1);RAangle(i) = RAA(i,1);t(i) = i;
endfigure(1);
plot(t,LHangle, t,LKangle, t,LAangle);grid on;
figure(2);
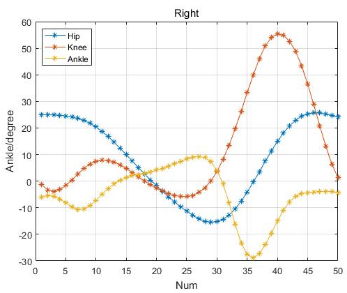
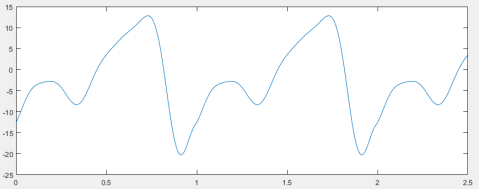
plot(t,RHangle, t,RKangle, t,RAangle);grid on;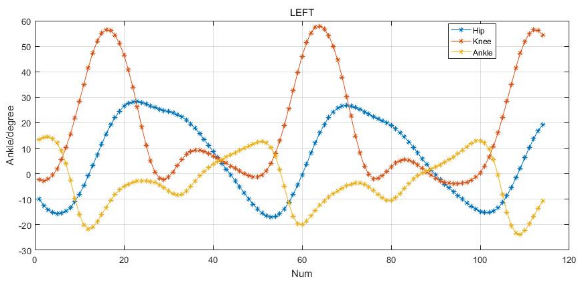
由图中可以看出,一个步态周期有50个点,画出一个步态周期的轨迹如下:

三、轨迹生成
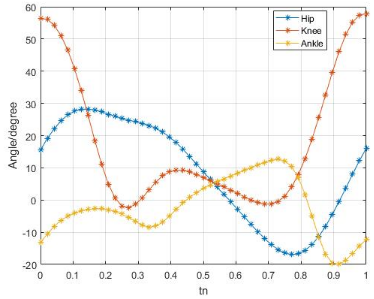
以上数据都是离散点,在各采样点处并不平滑,不方便用于运动控制。图中可以看出比较明显的周期性,截取其中一个周期的数据进行拟合,并且将横坐标归一化。
Num=16到Num=64这一段数据周期性明显,横坐标归一化如下:
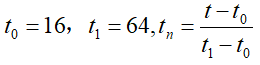
按这种方式提取的数据如下(提取的是左腿的数据,左右腿曲线形状一样只是相位差):
各关节的运动轨迹采用傅利叶级数展开的形式进行拟合,具体表达式如下:
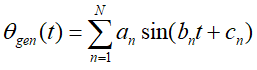
其中是归一化时间,N表示拟合项数,a,b,c是拟合参数。使用matlab cftool工具箱,髋、膝、踝的拟合结果分别如下图所示:

图1 髋关节
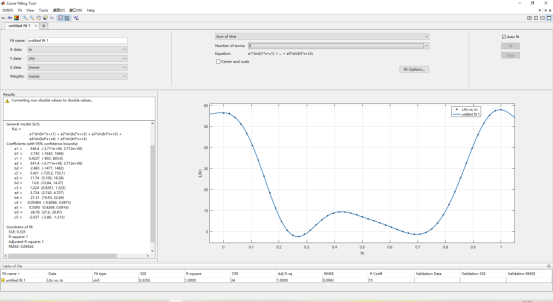
图2 膝关节
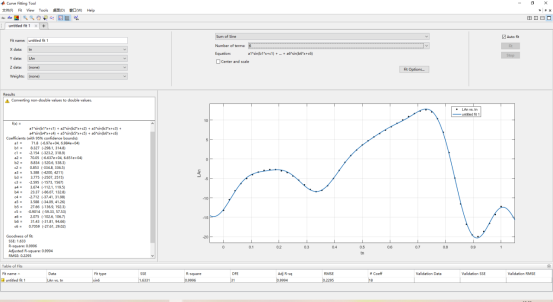
图3 踝关节
由于髋、膝、踝关节标准数据复杂程度不一样,髋关节项数,膝关节
,踝关节
时,可以使RMSE比较小,图中也可以看出拟合曲线与标准步态误差较小,可以满足步态控制要求。
为了方便临床根据不同人群调整不同步态,需要将步态轨迹进一步参数化处理如下:
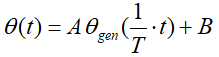
其中,A用于调节幅值,B用于调节角度偏移,T是步态周期,t表示时间,。当A=1,B=0,T=1时,
和
是等价的。因此,可以通过上式来调整各关节步态角度。
用这种方式生成的轨迹,有一个问题,在两个周期连接处,轨迹不平滑有突变,以膝关节为例,如下图所示:
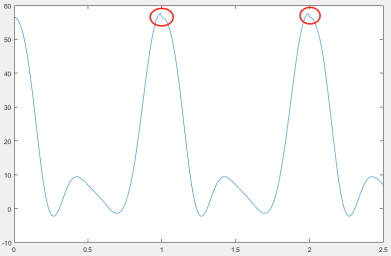
在进行拟合前需要将数据先处理一下,让和
处的值相等:

处理之后再进行傅利叶曲线拟合,处理之后的曲线如下图,可以看出在两个周期连接处,轨迹平滑没有突变。
对比一下A,B,T取不同的值时的曲线如下:

髋关节和踝关节的轨迹如下图所示:

髋关节
踝关节
这篇关于外骨骼机器人(七):标准步态数据库的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







