四足专题
四足机器人控制算法——建模、控制与实践(unitree_guide配置)
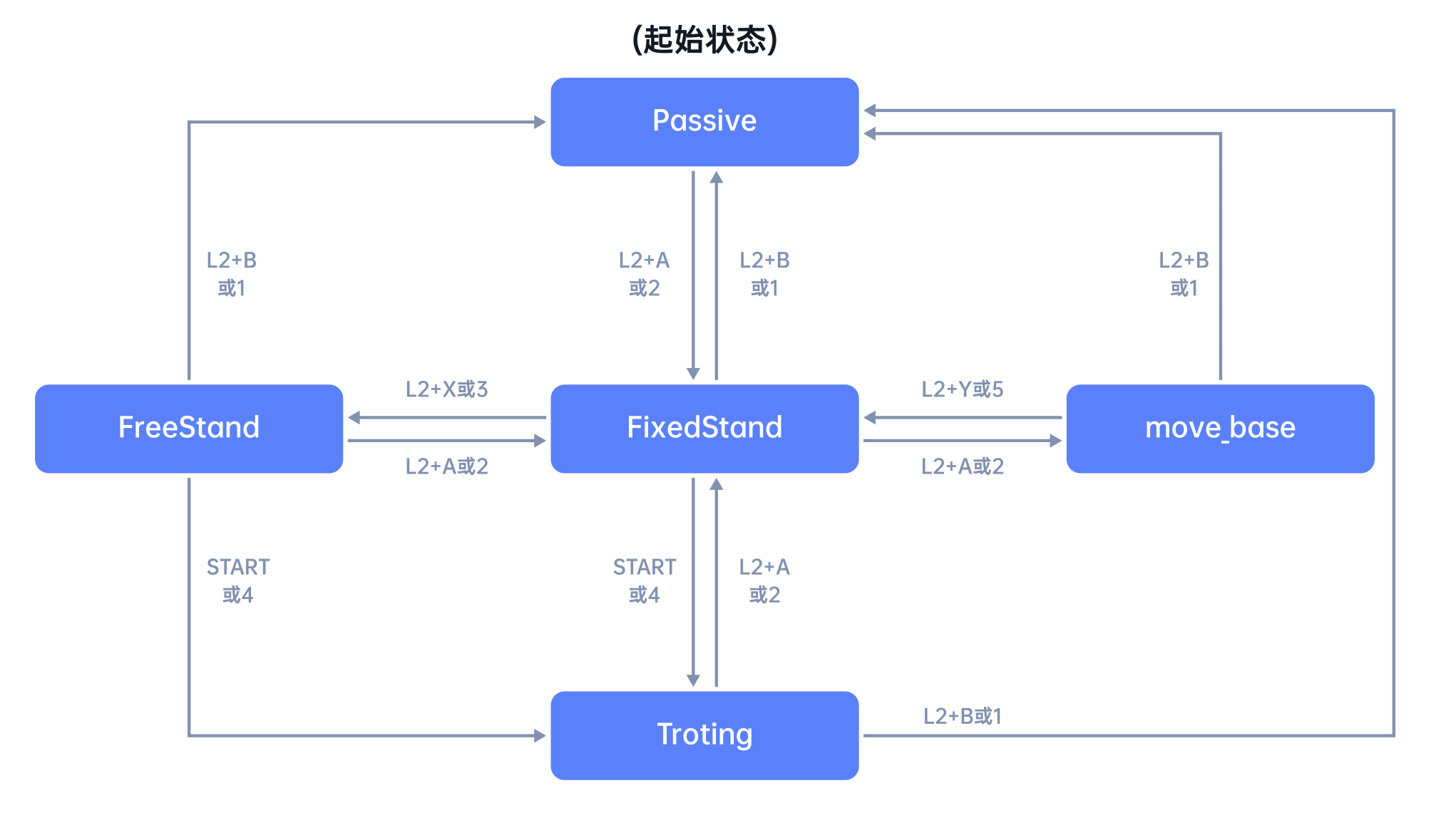
目录 官方文档 unitree_guide 1. 快捷指令 2. ROS安装 3. LCM库安装 3.1. 安装步骤 4. pthread库 5. 工程文件下载 6. 编译 报错: 报错1 报错2: 报错3 其他报错 7. 运行 7.1. 运行 Gazebo 仿真环境 7.2. 启动控制器 8. 简单使用 官方文档 宇树科技 文档中心 四足机器人算法实
四足机器人步态仿真(二)PyBullet 机械臂运动学仿真(以绘制圆形路径为例)
观前提醒:本章主要内容是通过PyBullet仿真kuka机械臂,并控制机械臂末端按照预定轨迹运动 一、什么是运动学? 运动学是物理学的一个分支,专注于物体的运动描述,包括位移、速度、加速度等,而不考虑这些运动是如何产生的(即不考虑力和质量)。运动学可以应用在很多领域,包括机械工程、机器人学、生物力学等。 在机器人学中,运动学特别指的是机器人各个部件之间的运动关系。机器人的运动学可以分为两个主要

Webots并联四足机器人仿真
并联四足机器人仿真: 1.机器人整机仿真: 1)基于位置控制&PID算法&运动学逆解 2)足端轨迹:摆线 3)步态:Trot步态,转向步态,跳跃(跳跃,跳转,猫跳,后空翻) 并联单腿仿真: 一条并联单腿模型+控制器代码(验证位置控制和运动学逆解,足端轨迹) 版本:webots R2021b vx:LibFreeCx330,csdn私信我可能无法及时看到 四足机器人 vx:
四足机器人步态仿真(三)四足机器人基础步态仿真
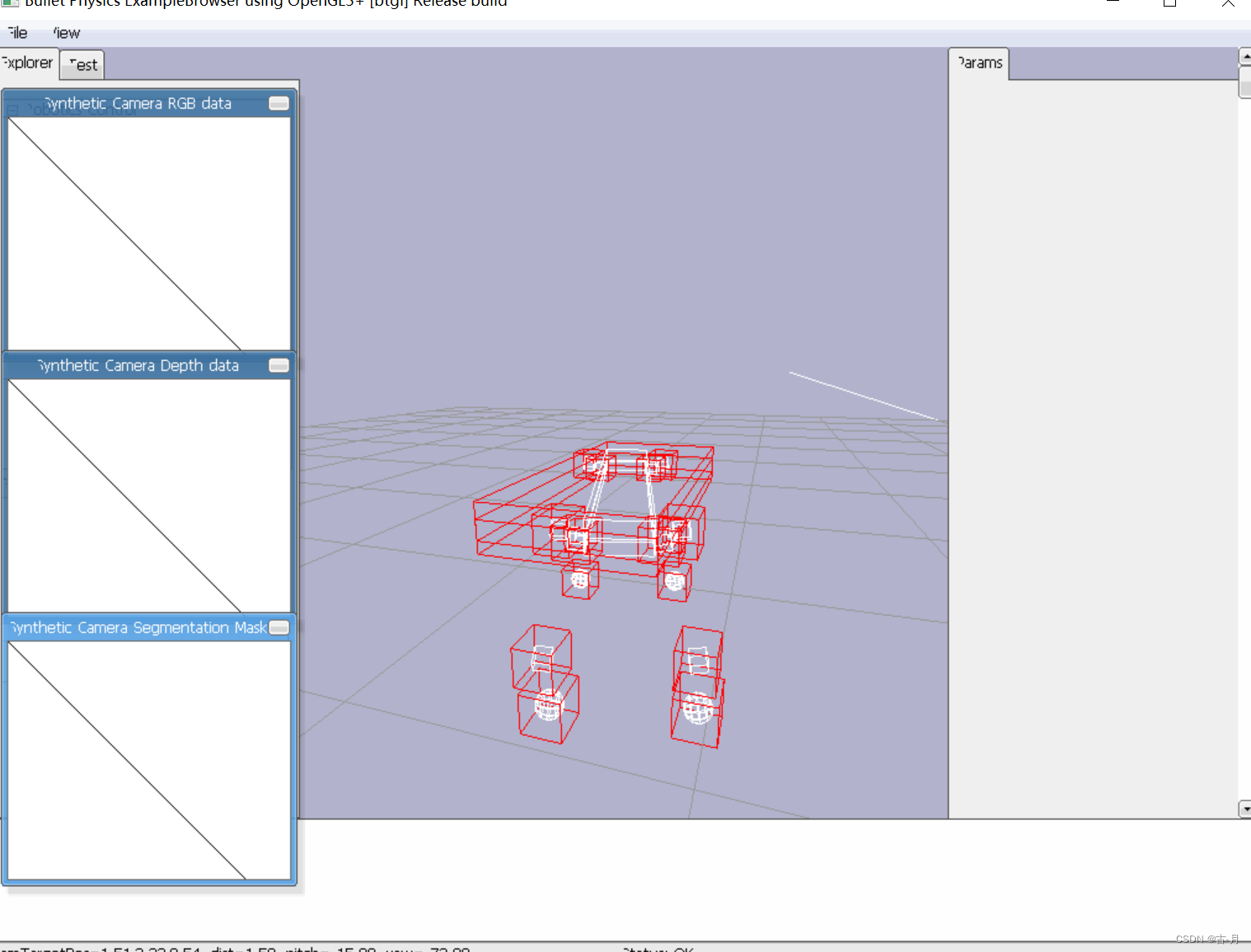
观前提醒,本章主要内容为分析四足机器人步态实现和姿态控制,碰撞体积等程序 步态效果: 一、完整代码如下 # -*- coding: utf-8 -*-import pybullet as pimport timeimport numpy as npp.connect(p.GUI)p.createCollisionShape(p.GEOM_PLANE)p.createMultiBody(0

无人机+机器狗:四足机器狗技术详解
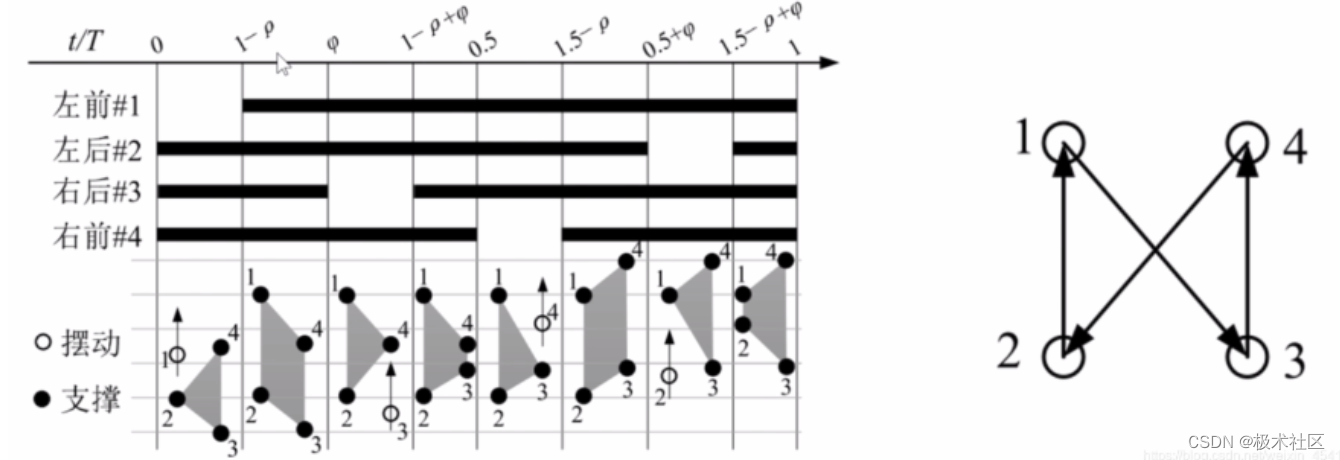
机器狗,也称为大狗机器人(Bigdog),是一种四足仿生机器人。它并不依靠轮子行进,而是通过其身下的四条“铁腿”移动,具有出色的机动性和稳定性。美国军方曾计划将阿富汗作为测试这种高机动能力机器人的试验场,以试验其与士兵协同作战的性能。 无人机与机器狗技术相结合,特别是在四足机器狗领域,是一个前沿且充满潜力的研究领域。四足机器狗,特别是以四足哺乳动物为参考的仿生四足机器狗,具有显著的非连续支撑特点
四足机器人应用篇之solidwork导出URDF
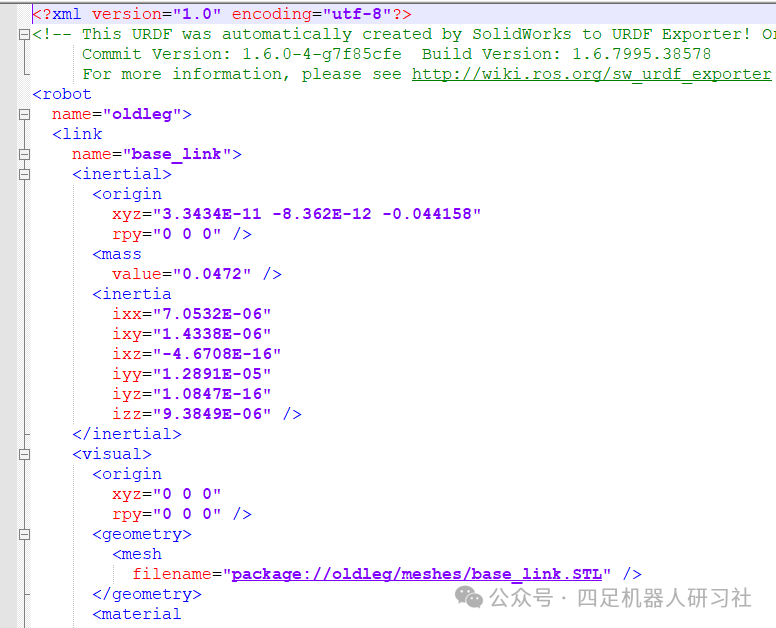
欢迎关注微信公众号 “四足机器人研习社”,本公众号的文章和资料和四足机器人相关,包括行业的经典教材、行业资料手册,同时会涉及到职业知识学习及思考、行业发展、学习方法等一些方面的文章。 |1.URDF介绍 一个URDF pakage示例 urdf是ROS用于描述机器人所有元素的模型文件,采用XML格式书写,全称是United Robotics Desc
基于四足机器人和机械臂的运动控制系统(二)
文章目录 前言一、四足步态二、视觉抓取三、远程遥控 谢绝转载,无作者许可不可用做其他用途(如教育展示产品、课程设计或毕业设计等) 前言 衔接上一篇文章,这篇文章主要来介绍项目的初步实现 一、四足步态 可以知道,该四足机器人由八个舵机组成,其中大腿四个(①②③④),小腿四个(⑤⑥⑦⑧),如下图所示: 第一,组装。在组装时先将每个舵机的状态调到90°,按90°状
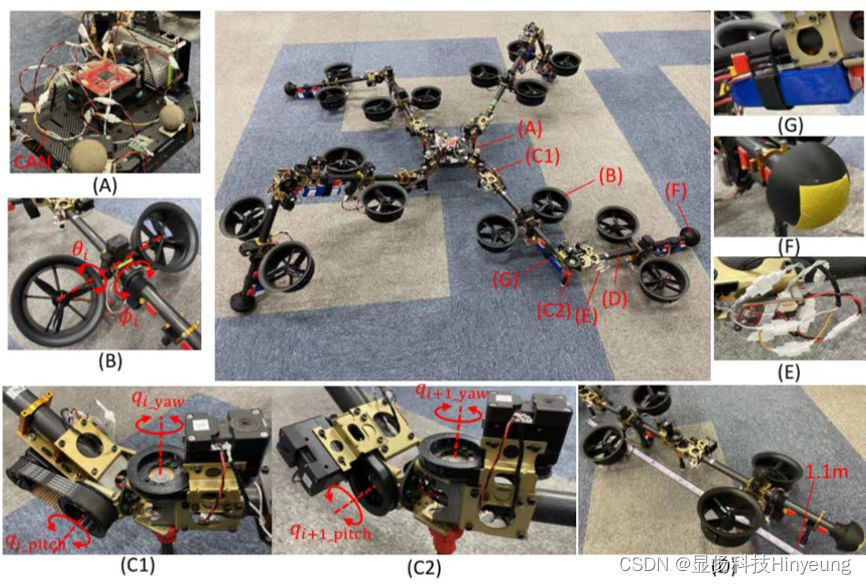
东京大学最新研究成果!一种可实现陆空两栖的新型四足机器人SPIDAR,具备多模态运动能力
原创/文 BFT机器人 现实中,蜘蛛可以凭借飘荡的蛛丝在空中漂浮,让它们能够穿越复杂地形。普通蜘蛛长度只有几毫米,重量只有几十克,如何让比蜘蛛重数百倍的机器人实现多模态运动,是众多学者研究的热点。 具有多模态运动能力的机器人,几乎都是移动系统的大杂烩,不能真正实现协同工作。例如,通过给多足机器人装上一堆螺旋桨们,能够让机器人实现飞行,但在其他时间,足或者螺旋桨对机器人本身来说只是增添额

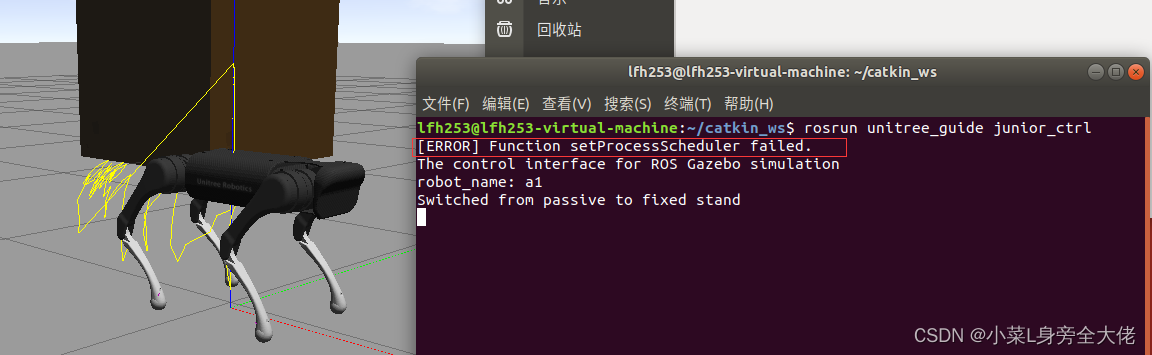
宇树开源四足机器人仿真-之环境配置
unitree guide开源代码在gazebo中的运行 1 安装依赖 Eigen库 方法1:使用apt安装 sudo apt install libeigen3-dev 方法2: 首先下载源码: [http://eigen.tuxfamily.org/index.php?title=Main_Page] 解压缩并在终端中打开该文件夹,然后进行编译: mkdir buildcd bui

四足机器人在电力巡检领域的应用优势与局限
四足机器人在电力巡检领域的应用优势与局限 | 近两年国网、南网对于四足机器人在电力上的巡检应用研究热度不断提升,最近杭州云深处科技推出了X30,其携带四枚MID360激光雷达,地形感知能力十分强悍,暴力的解决了困扰四足机器人多年的稳定上下楼梯问题。宇树科技也迅速推出对标产品B2,宣传视频上其在楼梯上的超强稳定性让人印象深刻。 然而,在电力领域该类机器人的稳定应用仍有巨大

项目精选:模块化四足机器狗、低成本无人机
模块化四足机器人 用Fusion 360®设计在Teensy 3.5和Arduino上用Arduino语言编码模块化结构(激光雷达、无人机、气体检测)自主功能 (避开障碍物,保持平衡,压力控制)PI(比例-积分)控制应用逆向运动学和运动学公式感知能力:激光雷达、气体检测、压力传感器、陀螺仪、GPS、Wi-Fi连接、摄像头 作者做的是一个完全由可替换模块组成的四足机器狗。这种模块化的方法使机器

论文阅读:四足机器人对抗运动先验学习稳健和敏捷的行走
论文:Learning Robust and Agile Legged Locomotion Using Adversarial Motion Priors 进一步学习:AMP,baseline方法,TO 摘要: 介绍了一种新颖的系统,通过使用对抗性运动先验 (AMP) 使四足机器人在复杂地形上实现稳健和敏捷的行走。主要贡献包括为机器人生成AMP数据集,并提出一种教师-学生训练框架来学习稳健
CMU和ETH联合研发了一个名为 「敏捷但安全」的新框架,为四足机器人在复杂环境中实现高速运动提供了解决方案
在高速机器人运动领域,实现同时兼顾速度和安全一直是一大挑战。但现在,卡内基梅隆大学(CMU)和苏黎世联邦理工学院(ETH)的研究团队带来了突破性进展。他们开发的新型四足机器人算法,不仅能在复杂环境中高速行进,还能巧妙避开障碍,真正做到了「敏捷而安全」。 论文地址: https://arxiv.org/pdf/2401.17583.pdf 在 ABS 的加持下,机器狗在各种场景下都展现出了惊

进化十多年,四足机器人的网红属性有改变吗?
近日小米在十周年的发布会上,发布了一款四足机器人,赚了一大波眼球。肯定有读者朋友好奇了,怎么小米突然也加入了烧钱大户四足机器人研发大军,省点钱不香吗?四足机器人的天花板波士顿动力,自1992年成立以来连续29年亏损,更别说其他的小弟生存状况。 在一众四足机器人企业数年亏损的情境下,仍然有资本与企业前赴后继,到底是看重了四足机器人背后的哪些商业价值? 我们知道,仿生机器人无论是双足还是四足,它们
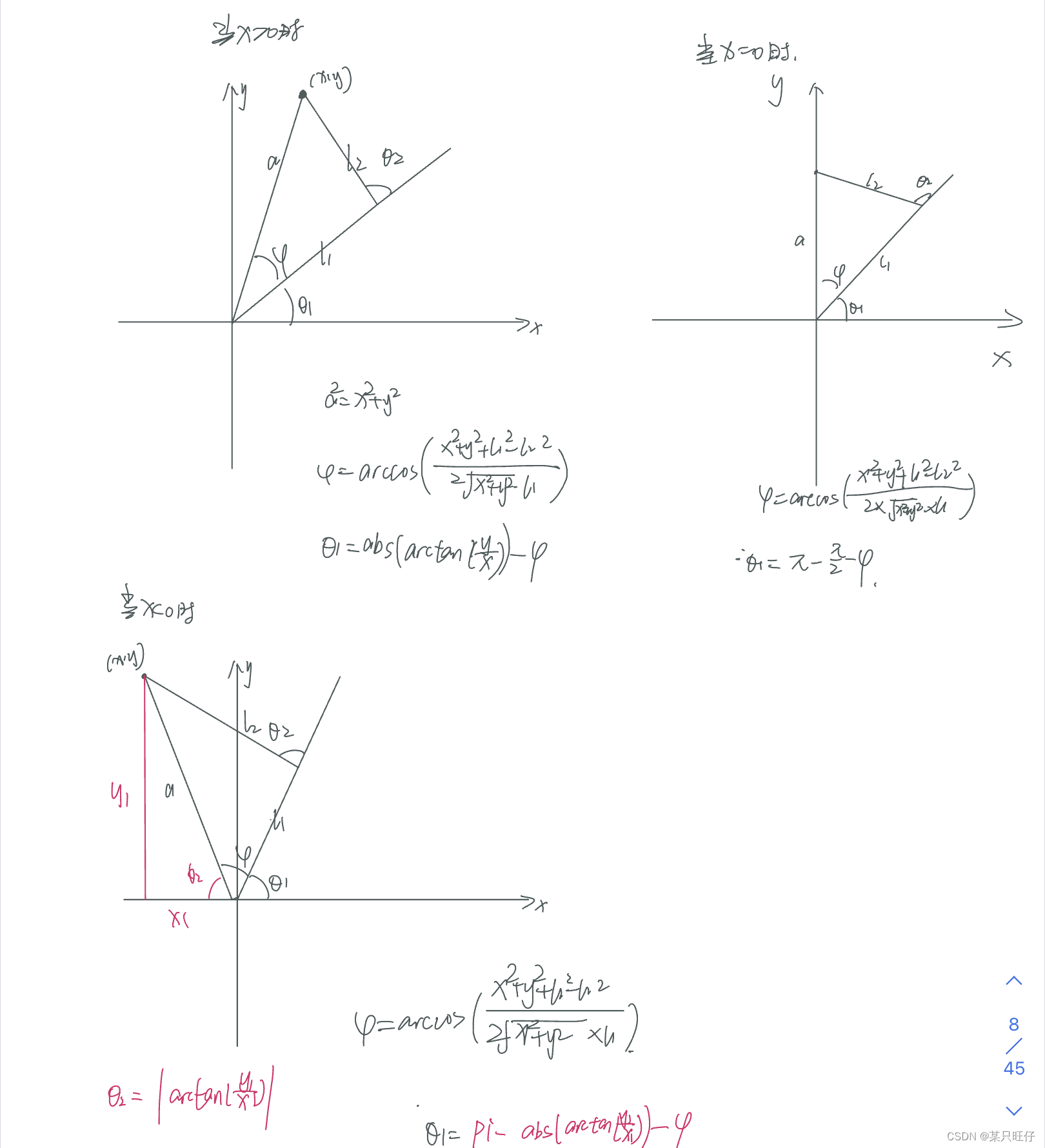
四足机器人学习笔记(八自由度运动学正解)
起初对于灯哥已经开源的代码中正运动学函数ik()的角度求解存在疑问 x1=-x1shank1=pi-acos((x1*x1+y1*y1-l1*l1-l2*l2)/(-2*l1*l2))fai1=acos((l1*l1+x1*x1+y1*y1-l2*l2)/(2*l1*sqrt(x1*x1+y1*y1)))if x1>0:ham1=abs(atan(y1/x1))-fai1eli

斯坦福机器狗的设计与实现 四足机器人的机械结构类型和制造
四足机器人的机械结构类型和制造 1、仿制对象 Stanford Doggo由斯坦福学生机器人俱乐部的极限流动团队开发。是一个重量不到5千克的四足机器人,能够动态运动,使其能够达到所有四足机器人的最高跳跃1.07米。还能以0.9米/秒的速度向前移动,其灵活的移动性使机器人还能行走,小跑,跳跃和后空翻。 2、四足机器人机械结构上的重要概念 腿型:并联腿,串联腿(运动范围大) 串联腿分类:外膝肘
【xr806开发板试用】XR806联调stm32控制并联四足马术机器人单腿运动学逆解与整体步态规划
一、项目介绍 使用RX806串口协议与大疆A板的stm32通讯,实现并联四足机器人的单腿运动学逆解与整体步态规划。 实物图 二、涉及相关算法 1.单腿运动学逆解 控制2个无刷电机(红色箭头各代表一个电机控制)并联成单足,经过角度闭环解算出足端轨迹,由足端做摆线轨迹(下图中绿色部分)形成类似于动物猫狗等单腿的运动 %摆线方程(matlab

【2023研电赛】安谋科技企业命题华中赛区二等奖:四足仿生机器人的巡检和建材识别
四足仿生机器人的巡检和建材识别 本文为2023年第十八届中国研究生电子设计竞赛安谋科技企业命题华中赛区二等奖作品分享,参加极术社区的【有奖活动】分享2023研电赛作品扩大影响力,更有丰富电子礼品等你来领! 参赛单位:中国地质大学(武汉) 指导老师:程卓 罗大鹏 参赛队员:罗晶凡 任雪 吴潇文 作品简介: 鉴于工业环境的复杂性,目前工业巡检主要利用人工巡视的方式进行,人工巡检耗

一款基于ESP32的迷你四足机器人
一、软件介绍 增加自定义动作模式,可以在小程序中自定义一个最多10个步骤的动作。 附件中:带自定模式固件bin.zip esp32c3固件文件 烧录下图设置 无串口版本esp32c3开发板烧录前先按住BOOT键再插线进入烧录模式,LoadMode选择USB。 二、APP下载 微信小程序蓝牙遥控app审核通过了,扫这个码就能用: 三、图片展示
制作一个空间连杆四足【内附资料下载链接】
1. 运动功能说明 空间连杆四足的主要结构是一套欠驱动的空间连杆组,可以被动适应不平整的地面。它只包含一个舵机,通过舵机的摆动可以实现向前爬行。 2. 结构说明 仅仅使用了一个电机,采取欠驱动设计方案,因此其四肢有一定的松散空间,遇到地面不平可以自动适应。欠驱动的设计思路一方面保证了它的自适应性,另一方面减少了冗余的电机,使其更加节能。在连杆组的作用下,
机器人制作开源方案 | 齿轮传动轴偏心轮摇杆简易四足
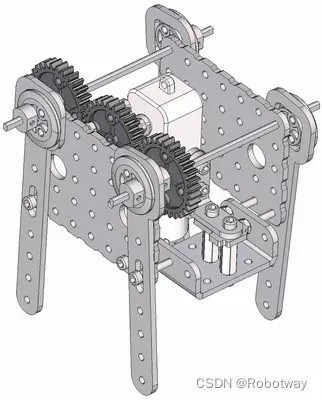
1. 功能描述 齿轮传动轴偏心轮摇杆简易四足机器人是一种基于齿轮传动和偏心轮摇杆原理的简易四足机器人。它的设计原理通常如下: ① 齿轮传动:通过不同大小的齿轮传动,实现机器人四条腿的运动。通常采用轮式齿轮传动或者行星齿轮传动,使得各个关节能够协同工作,完成步态运动。 ② 轴偏心轮:机器人的每条腿上安装有一个轴偏心轮摇杆装置。该装置由一个偏心轮和一个连杆组成
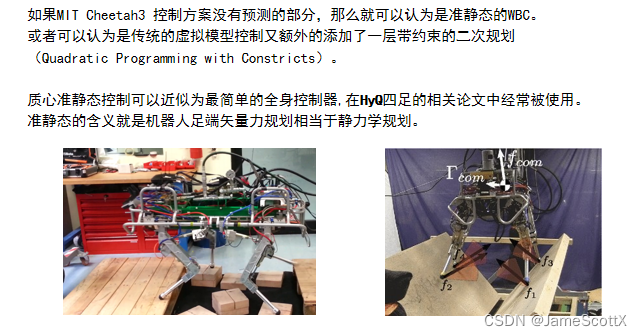
四足机器人质心准静态控制器(一)
前言: 之前古月居邀请着出四足机器人课程来着,但是由于时间和其他原因最后没有录播,这里就粗糙的介绍下,大概分为四章,大家可以直接白嫖,对应的工程参考代码可以到我的GitHub上参考。 对于控制刚体机器人来说,控制策略构建大概可以三部来实现。 首先是构造模型,模型可以是全动力学模型,或者是低维的替代模型。 优化目标一般是 状态跟踪误差最小,能量消耗最小,等等
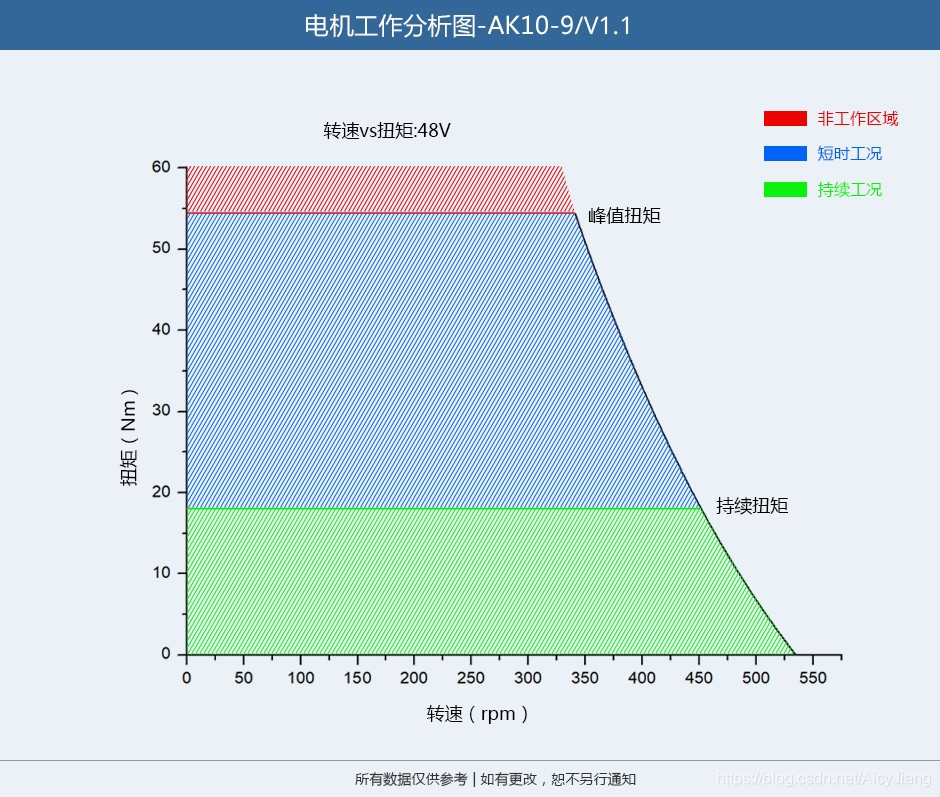
CubeMars的AK模组,专业应用于四足机器人
源自CubeMars团队的多年研究与沉淀,与2019年推出的AK系列模组,包含电机本体,减速器和控制器。该系列产品专业应用于四足狗和穿戴式外骨骼机器人。 常用电压24V和48V,更多详情欢迎围观官网 www.cubemars.com