本文主要是介绍宇树开源四足机器人仿真-之环境配置,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
unitree guide开源代码在gazebo中的运行
1 安装依赖
-
Eigen库
方法1:使用apt安装
sudo apt install libeigen3-dev方法2:
首先下载源码:
[http://eigen.tuxfamily.org/index.php?title=Main_Page]
解压缩并在终端中打开该文件夹,然后进行编译:mkdir buildcd buildcmake ..sudo make install在任意终端输入命令:
cd /usr/include/eigen3或者
cd /usr/local/include/eigen3如果上述路径存在,则说明已经安装成功
-
安装调试用的matplotlib和numpy
查看系统python版本,如果为3.6/7/8,则需切换为2.7, 命令如下:
sudo ln -s /usr/bin/python2.7 /usr/bin/python
PATH=/usr/bin:$PATH
然后运行以下语句没有报错则说明已经有numpy和matplotlib两个python库,否则需要安装这两个库pip install numpypip install matplotlib -
安装通信库lcm
在任意终端输入:lcm-tester如果可以正常运行,则LCM已经成功安装,否则需要进行手动安装,如下所示:
# 安装依赖# 必选sudo apt install build-essential libglib2.0-dev cmake# 可选(如果没安装它最后LCM失败则最好安装),可根据使用的语言选择安装sudo apt install default-jdk python-all-dev liblua5.1-dev golang doxygen# 拷贝源码git clone https://github.com/lcm-proj/lcm.gitcd lcm# 编译并安装mkdir build && cd buildcmake ..make -j4sudo make install -
多线程pthread库
这个库通常已经和ubuntu一同安装,在任意终端输入
getconf GNU_LIBPTHREAD_VERSION如果显示版本信息,则已经成功安装。
2 创建ros工作空间并利用catkin_make工具编译
-
创建工作空间
#catkin_ws是ROS工作的路径即ros的工作空间,可以自定义名字mkdir -p ~/catkin_ws/srccd ~/catkin_ws/catkin_make如果catkin_make报错,可能与系统安装了anaconda有关2,则在初始化工作空间时,将catkin_make替换为
catkin_make -DPYTHON_EXECUTABLE=/usr/bin/python3 -
下载package并编译
在下方网址
https://github.com/unitreerobotics分别下载unitree_ros、unitree_guide,unitree_ros_to_real/unitree_legged_msgs,然后放到catkin_ws/src功能包下,然后编译
cd ~/catkin_ws
#catkin_ws是ROS工作的路径
catkin_make
有时因为catkin_make的软件包编译顺序没有配置,会导致找不到依赖项的报错,这时再次执行catkin_make即可解决;其他错误如下:
2.1*报错解决
错误如下:
错误一:
CMake Error at /opt/ros/noetic/share/catkin/cmake/catkinConfig.cmake:72 (find_package):
Could not find a configuration file for package move_base_msgs.Set move_base_msgs_DIR to the directory containing a CMake configuration
file for move_base_msgs. The file will have one of the following names:move_base_msgsConfig.cmake
move_base_msgs-config.cmakeCall Stack (most recent call first):
simple_navigation_goals/CMakeLists.txt:7 (find_package)-- Configuring incomplete, errors occurred!
Invoking "cmake" failed
此报错是由于move_base_msgs缺失引起的,使用如下命令安装这个功能包:
sudo apt-get install ros-noetic-navigation
如果不是noetic版本的ros只需要更改版本名称即可。
错误二:
substitution args not supported: No module named 'rospkg'
解决方法:
pip install rospkg
错误三:
ModuleNotFoundError: No module named ‘defusedxml
解决方法:将系统python版本切换为2.7
sudo ln -s /usr/bin/python2.7 /usr/bin/python
PATH=/usr/bin:$PATH
运行demo
-
catkin_make编译成功后
-
输入
source ./devel/setup.bash -
然后在工作空间下再打开一个终端,输入命令打开仿真器:
roslaunch unitree_guide gazeboSim.launch打开仿真器时可能会出现如下报错:
RLException: [gazeboSim.launch] is neither a launch file in package [unitree_guide] nor is [unitree_guide] a launch file name
The traceback for the exception was written to the log file
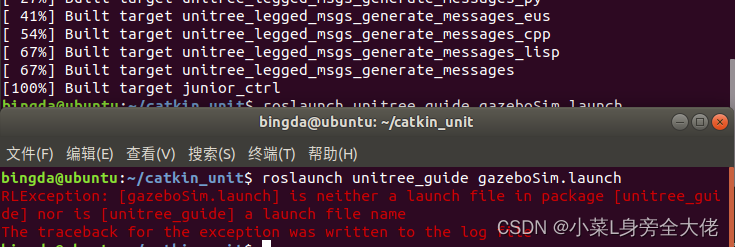 这种错误的出现,是因为此ros工作空间的环境变量没有被添加!!! 添加环境变量即可,添加环境变量方法不唯一,这里介绍两种方法,两种方式各有优点:
这种错误的出现,是因为此ros工作空间的环境变量没有被添加!!! 添加环境变量即可,添加环境变量方法不唯一,这里介绍两种方法,两种方式各有优点:
方法一
确保在建立工作空间的时候就已经执行catkin_make
直接在命令行,进入到工作空间,然后执行以下命令:source ./devel/setup.bash这种方式,可以直接在命令行中操作,短时间内是看着比较简单的。每次不确定的时候就可以直source一下。
方法二
直接对环境变量文件进行修改
在命令行打开文件./bashrc,命令如下:#不行的话在下面语句加sudo gedit ~/.bashrc在文件最后加入以下语句:
source ~/work_ws/devel/setup.bashexport ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:~/work_ws/注意:这里的work_ws是ROS工作的路径
添加完之后,重启bashrc,直接执行以下语句
source ~/.bashrc查看ROS路径是否添加上
echo $ROS_PACKAGE_PATH 添加上则如上图所示。
添加上则如上图所示。 -
最后再在工作空间下打开一个终端,启动控制器:
rosrun unitree_guide junior_ctrl
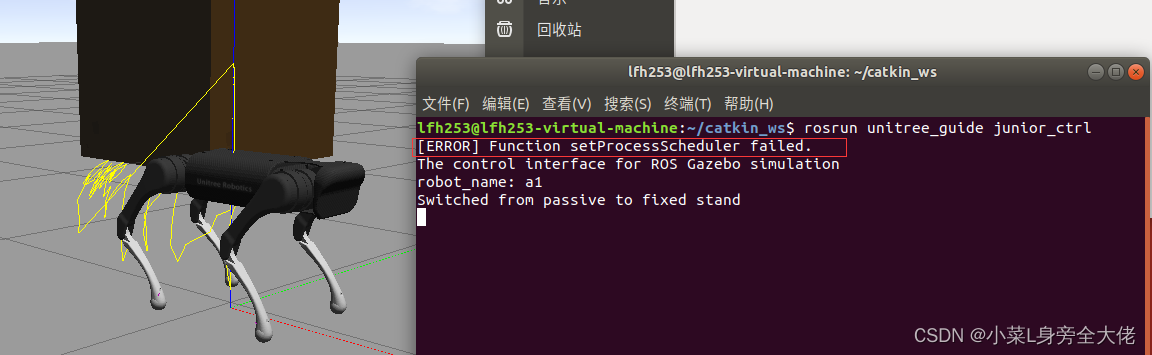 出现[ERROR] Function setProcessScheduler failed.属于正常情况,这是因为没有将控制器程序设置为实时进程,初步仿真可以选择忽略。而后在该终端界面按下数字键<2>切入到固定站立模式,<1>返回阻尼模式。
出现[ERROR] Function setProcessScheduler failed.属于正常情况,这是因为没有将控制器程序设置为实时进程,初步仿真可以选择忽略。而后在该终端界面按下数字键<2>切入到固定站立模式,<1>返回阻尼模式。
[1]https://blog.csdn.net/weixin_45467056/article/details/123569027
[2]https://zhuanlan.zhihu.com/p/628450886
[3]https://blog.csdn.net/qq_44164791/article/details/130351276
这篇关于宇树开源四足机器人仿真-之环境配置的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







