宇树专题
宇树科技A1机器狗开源QP-MPC-Controller仿真环境搭建及运行
参考文章:硕哥大佬知乎文章又一个开源的四足机器人控制器 - 知乎 (zhihu.com) 热心网友开源环境配置:解析A1-QP-MPC-Controller (matheecs.tech) 代码可以从知乎文章中跳转至github下载 本文主要用于说明如何搭建宇树科技开源代码运行环境,环境配置比较复杂,需要提前准备好一个游戏手柄,键盘无法控制机器狗运动 原始仓库采用 Docker 安装依赖环
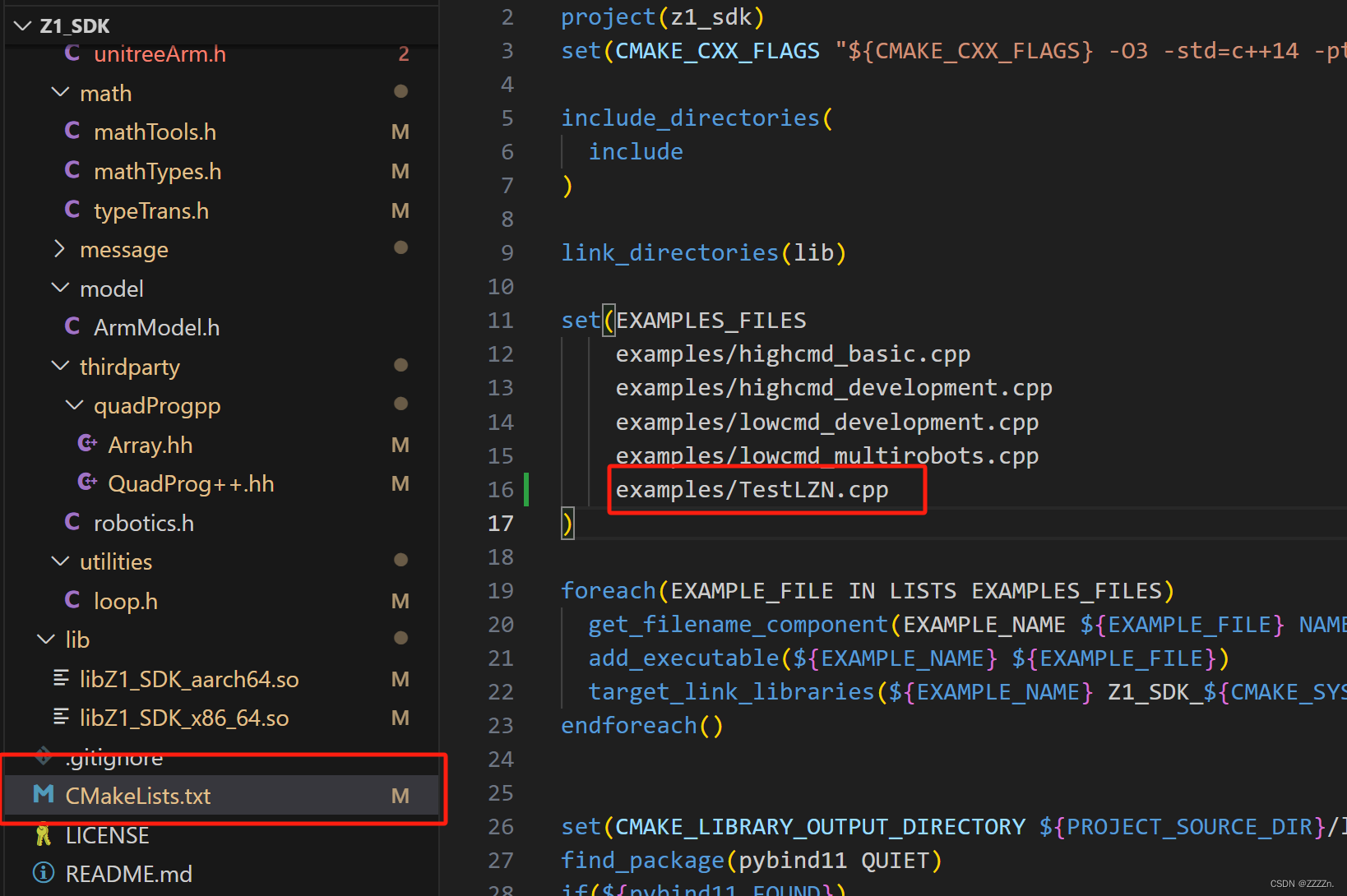
对Unitree宇树Z1机械臂进行SDK修改和调用示例
参考Unitree官方文档 键盘控制 · unitree-docs 修改机械臂IP进行连接 ping机械臂的默认IP(192.168.123.110) 网络不可达,此时需要修改机械臂IP使其与PC在同一局域网内,PC端才可与机械臂正常通信 在这里修改为192.168.123.xxx网段 调用ifconfig查看机械臂修改后的IP,在这里是33端口 调用官方提供的SDK(z


宇树A1电池拆解分享
文章目录 一. 关于A1电池二. 拆解过程2.1 结构设计2.2 电路方案2.3 电芯设计 三. 相关链接 一. 关于A1电池 今天的主角是宇树的A1电池。该电池主要用在宇树的A1机器狗上,A1主打的是运动性能,最大持续奔跑速度可以达到3.3m/s (11.88km/h),是目前国内速度最快、最稳定的中小型四足机器人。之所以能跑得这么快,归功于A1的高级的动态平衡算法、高
王兴投资了王兴兴:宇树科技完成近10亿融资 美团是股东
雷递网 乐天 2月23日 智能机器人公司宇树科技 Unitree日前宣布完成近 10 亿元 B2 轮融资,本轮投资方包括美团、金石投资、源码,老股东深创投、中网投、容亿、敦鸿和米达钧石跟投。 宇树科技Unitree表示,资金将主要用于产品研发,业务拓展以及团队搭建等方面。 顺为资本曾于2021年领投宇树科技 A 轮融资,并在后续B轮融资中给予持续支持。 王兴兴在2009年读大一时,就独自一人完
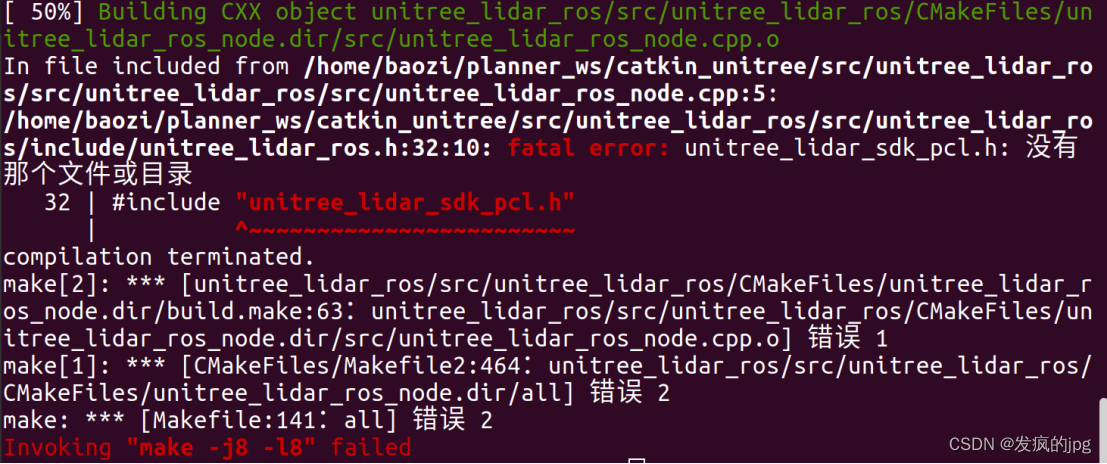
宇树L1 RM激光雷达初试用
设备开箱 如上,包括:雷达设备、电源适配器、转换板和ISB线。 雷达重量为227g 硬件连接 按下图连接好设备后,可在电脑上安装软件查看点云效果 ROS驱动安装 官网下载Unilidar_Sdk_v1.0.0.zip,解压后如下: 安装步骤: 1、先安装unitree_lidar_sdk 安装步骤在unitree_lidar_sdk/REA

宇树机器人Unitree-go1学习记录-SDK上传、编译和运行
1.SDK上传 先在github上下载好所需SDK,内容如图 接着进入终端,从本地将文件夹传输到目标服务器中也就是go1的运动控制板卡 pi@192.168.12.1,密码123 具体指令:scp【本地文件的路径】【服务器用户名】@【服务器地址】:【服务器上存放文件的路径】 scp -r /home/melodic/unitree
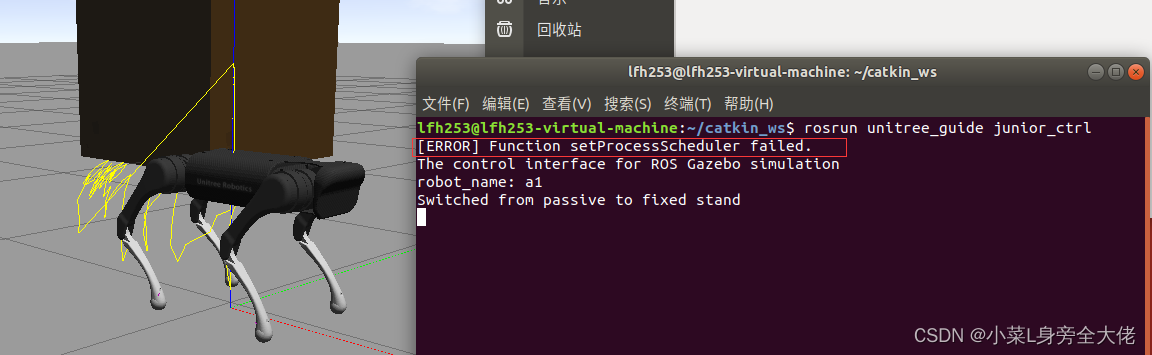
宇树开源四足机器人仿真-之环境配置
unitree guide开源代码在gazebo中的运行 1 安装依赖 Eigen库 方法1:使用apt安装 sudo apt install libeigen3-dev 方法2: 首先下载源码: [http://eigen.tuxfamily.org/index.php?title=Main_Page] 解压缩并在终端中打开该文件夹,然后进行编译: mkdir buildcd bui
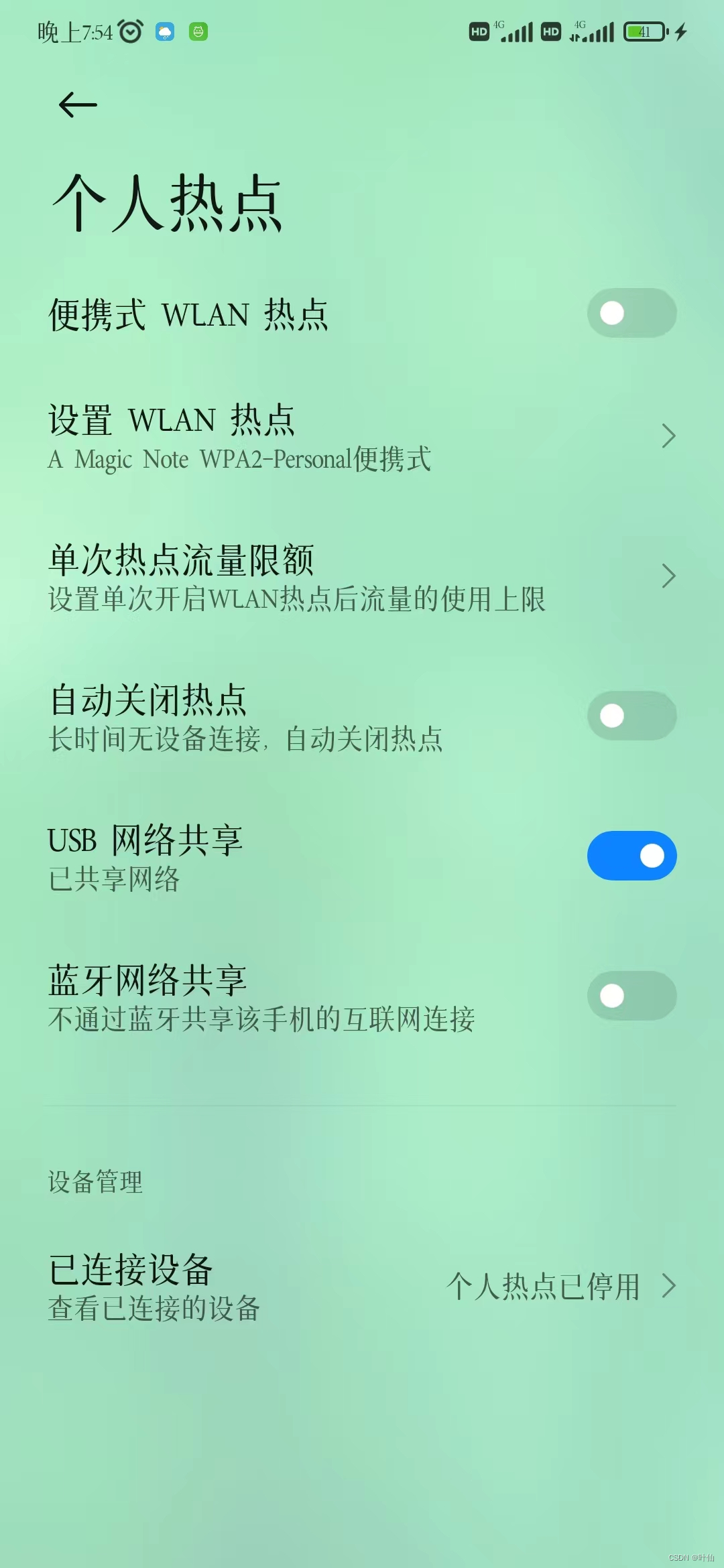
宇树Unitree机器狗连接外网的一种方法
宇树官方提供的方式: 宇树机器狗连接网络的相关说明 (yuque.com) 我这里提供一种我采用的方式,仅供参考: 需要一根手机数据线,能联网的手机 我这里使用的是小米手机,其余手机大概也能行。 如下,是为宇树go1上的15号板子联网 为了在狗身上直接操作,首先,我这里连接了显示屏,鼠标,键盘(由于15号板仅一个usb口,加了个拓展坞) 这些不重要,我们