本文主要是介绍对Unitree宇树Z1机械臂进行SDK修改和调用示例,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
参考Unitree官方文档 键盘控制 · unitree-docs
修改机械臂IP进行连接
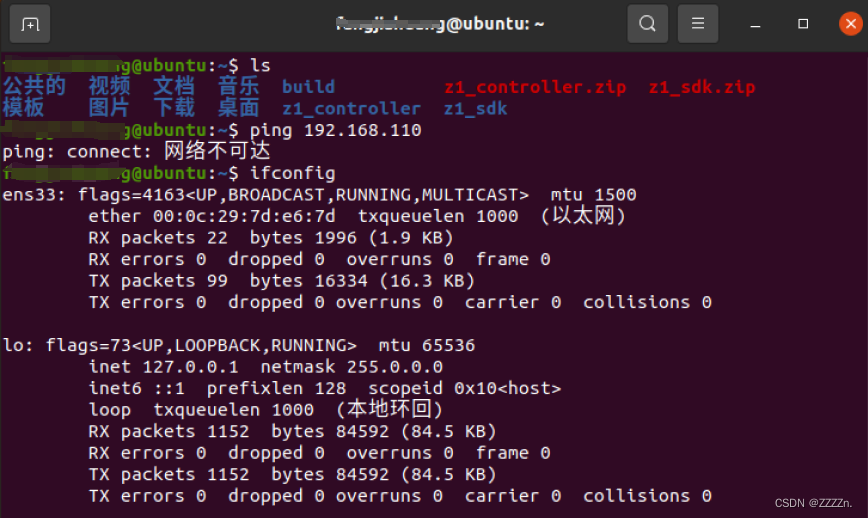
ping机械臂的默认IP(192.168.123.110)
网络不可达,此时需要修改机械臂IP使其与PC在同一局域网内,PC端才可与机械臂正常通信
在这里修改为192.168.123.xxx网段
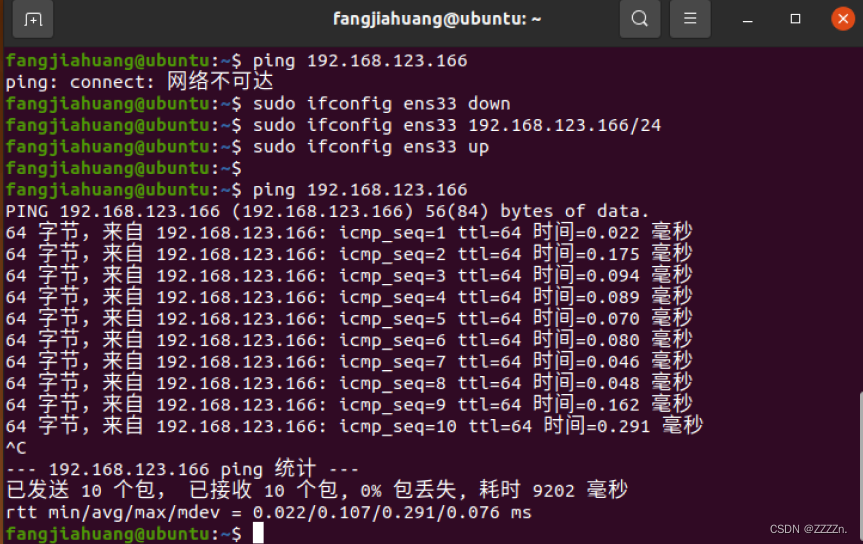
调用ifconfig查看机械臂修改后的IP,在这里是33端口

调用官方提供的SDK(z1_controller和z1_sdk)
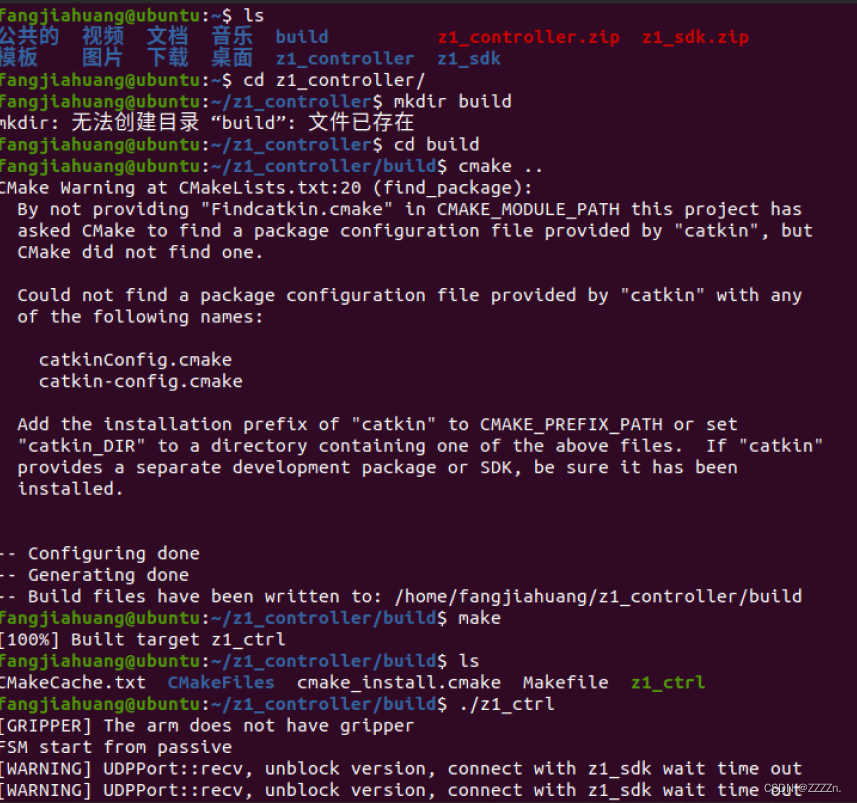
在第一个Terminal中调用编译z1_controller,在该文件夹下创建build文件夹,执行./z1_ctrl。
因为此时还没有启动机械臂SDK与机械臂控制器通信,所以会出现[warning]
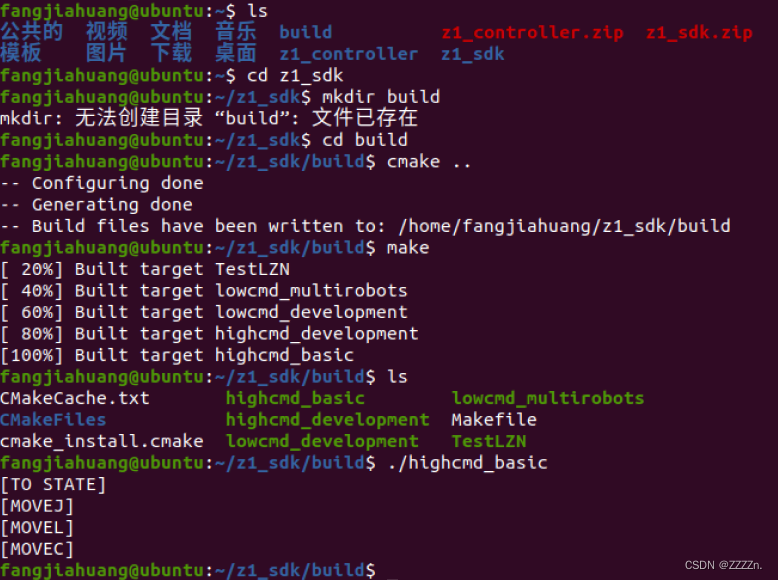
在第二个Terminal中打开z1_sdk文件夹,创建build文件并编译,执行示例代码/highcmd_basic
此时机械臂启动,并执行highcmd_basic.cpp文件的内容
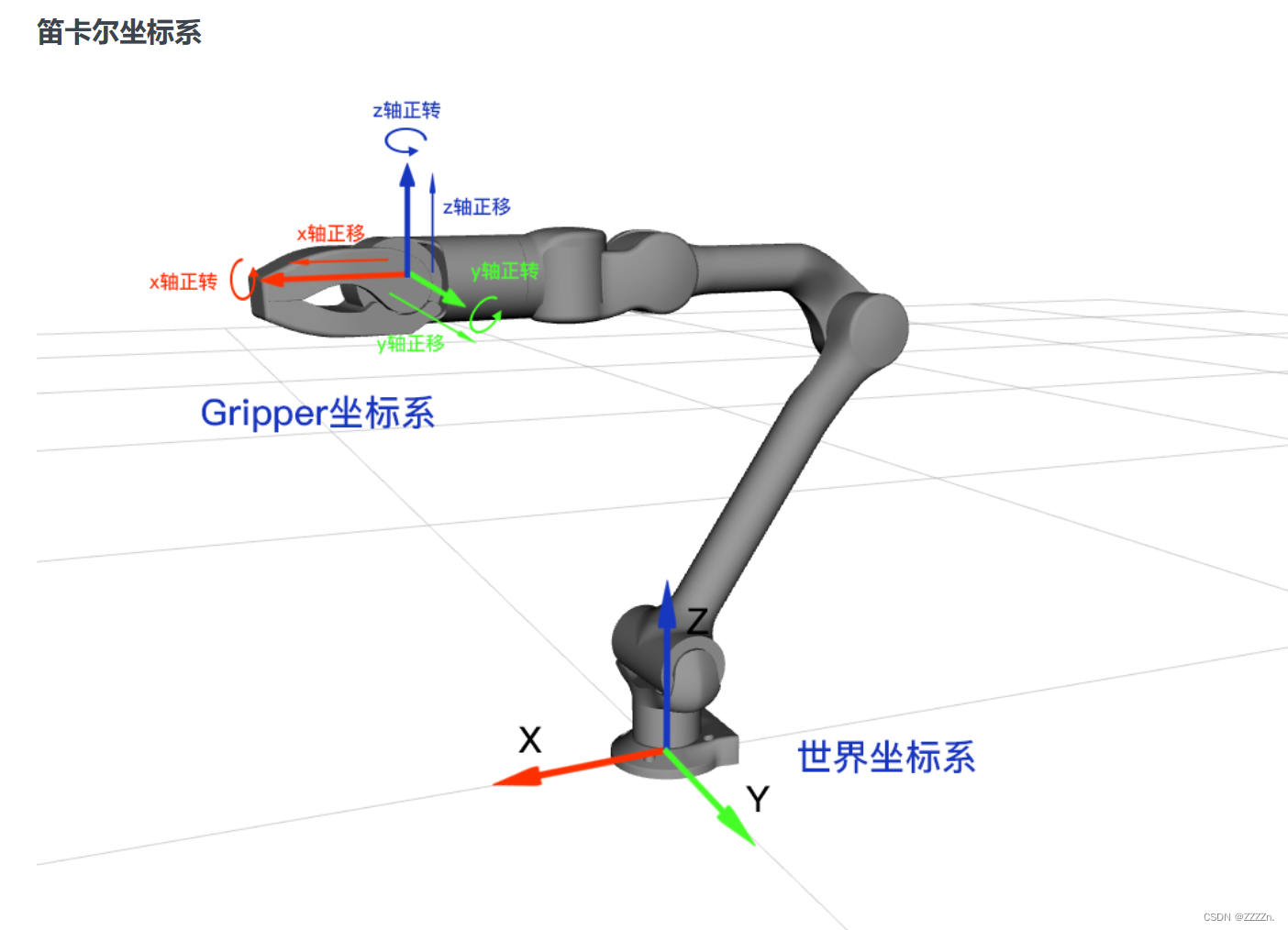
调用官方库进行自主编写直线运动Linear代码(C++)
根据Cartesian坐标系,调整机械爪的姿态和位置 (roll pitch yaw x y z)
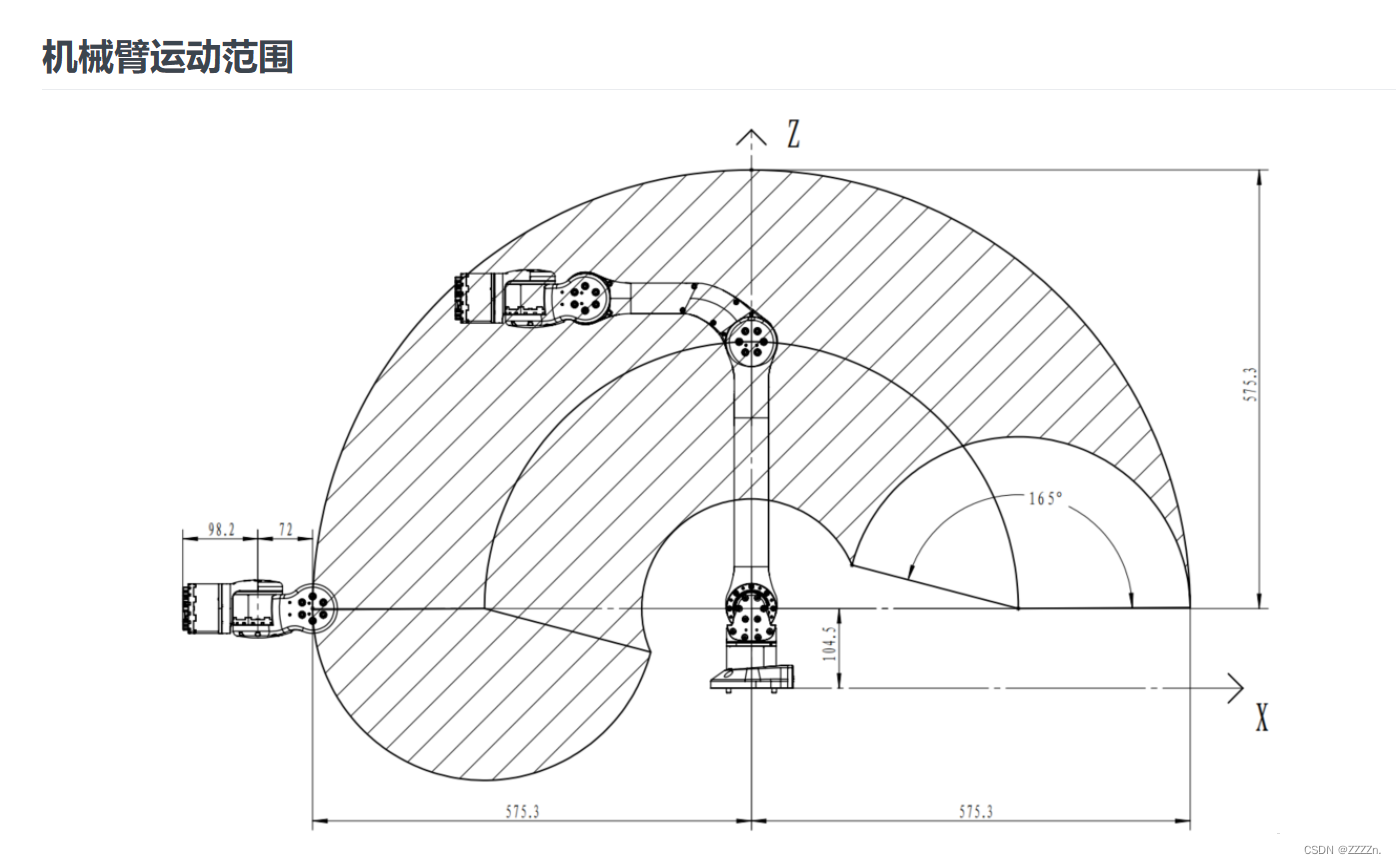
需要先确定好机械臂的运动范围,若超出则会出现以下ERROR
[ERROR] MoveL posture: (roll pitch yaw x y z) has no inverse kinematics.
直线运动Linear在官方库中对应"unitree_arm_sdk/control/unitreeArm.h"内被封装完毕的MoveL(posture, gripper_pos, cartesian_speed)函数。posture为位姿数组,gripper_pos为夹具位置初始化,cartesian_speed笛卡尔坐标系下各个轴的运行速度。
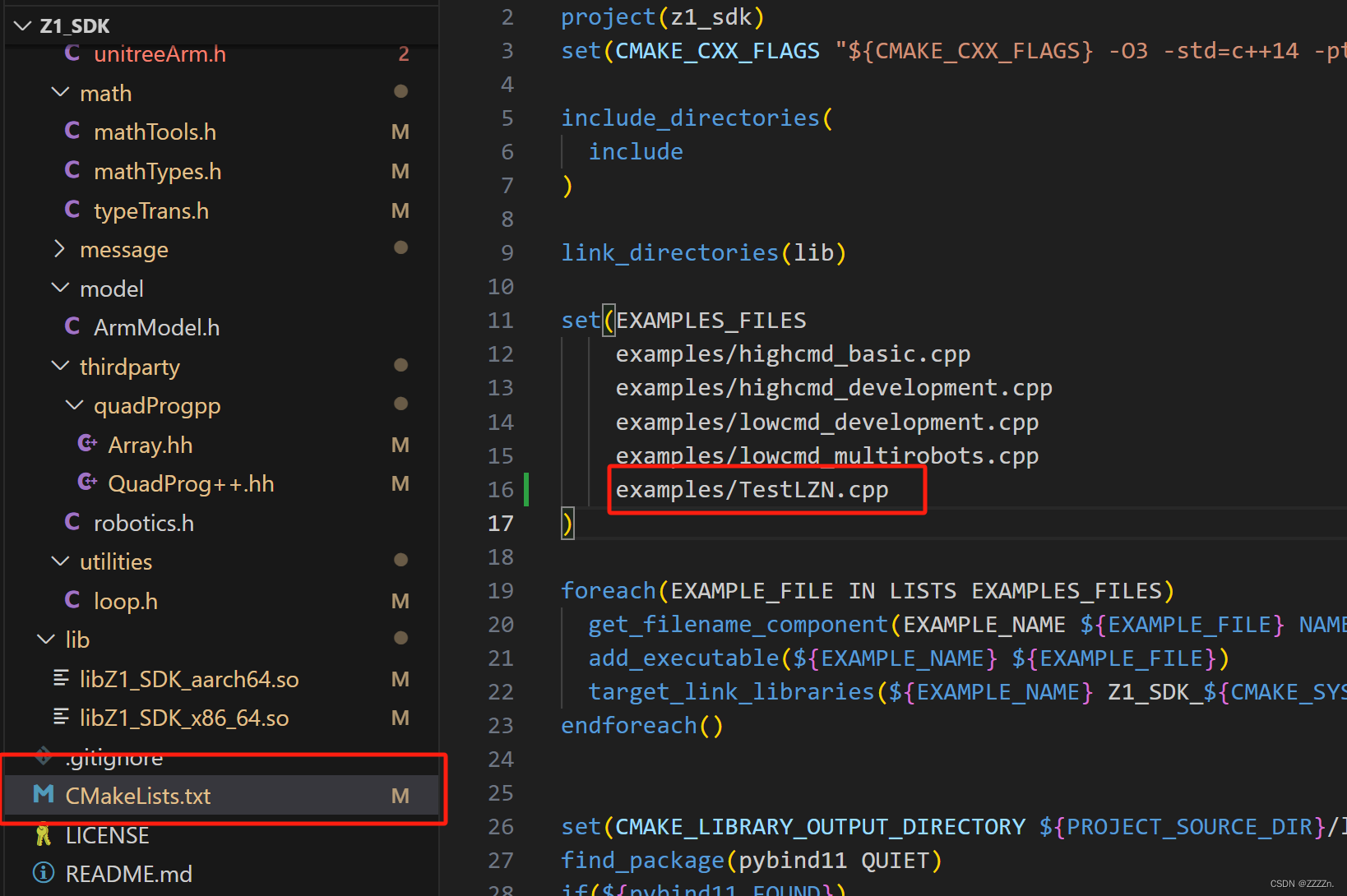
在这里实现机械臂画一个”口“字的.cpp文件,该文件放在z1_sdk的example下。
//#include <ncurses.h>//Linux
#include "unitree_arm_sdk/control/unitreeArm.h"
using namespace UNITREE_ARM;
class Z1ARM : public unitreeArm{
public:
Z1ARM():unitreeArm(true){};
~Z1ARM(){};
void armCtrlByFSM(); // 通过有限状态机(FSM)控制机械臂
void printState(); // 打印机械臂的状态。
double gripper_pos = 0.0; // 夹具的位置。
double joint_speed = 2.0; // 关节的速度。
double cartesian_speed = 0.5; // 笛卡尔坐标系下的速度。
};
//Finite State Machine
void Z1ARM::armCtrlByFSM() {
Vec6 posture[2]; // 姿势数组。
gripper_pos = 0.0; // 夹具位置初始化。
std::cout << "[TO STATE]" << std::endl;
labelRun("forward");//初始位置(0,0,0,0.45,0,0.2)
//直线运动Linear
//输入末端位姿(roll pitch yaw x y z)
//向左
std::cout << "[MOVEL]" << std::endl;
posture[0] << 0,0,0,0.45,-0.15,0.2;
cartesian_speed = 0.5;
MoveL(posture[0], gripper_pos, cartesian_speed);
printState();
//向上
posture[0] << 0,0,0,0.45,-0.15,0.4;
cartesian_speed = 0.5;
MoveL(posture[0], gripper_pos, cartesian_speed);
printState();
//向右
posture[0] << 0,0,0,0.45,0.15,0.4;
cartesian_speed = 0.5;
MoveL(posture[0], gripper_pos, cartesian_speed);
printState();
//向下
posture[0] << 0,0,0,0.45,0.15,0.2;
cartesian_speed = 0.5;
MoveL(posture[0], gripper_pos, cartesian_speed);
printState();
}
void Z1ARM::printState(){
std::cout<<"------ joint State ------"<<std::endl;
std::cout<<"qState: "<<lowstate->getQ().transpose()<<std::endl;
std::cout<<"qdState: "<<lowstate->getQd().transpose()<<std::endl;
std::cout<<"tauState: "<<lowstate->getTau().transpose()<<std::endl;
std::cout<<"------ Endeffector Cartesian Posture ------"<<std::endl;
std::cout<<"roll pitch yaw x y z"<<std::endl;
std::cout<<lowstate->endPosture.transpose()<<std::endl;
}
int main() {
// initscr(); // 初始化 ncurses
// keypad(stdscr, TRUE); // 启用功能键
// noecho(); // 不回显按键
// curs_set(0); // 隐藏光标
std::cout << std::fixed << std::setprecision(3);
// 创建机械臂对象并启动控制线程
Z1ARM arm;
arm.sendRecvThread->start();
//所有电机返回初始位置
arm.backToStart();
arm.armCtrlByFSM();//运行
// 机械臂回到初始位置,设置为被动模式,关闭控制线程
arm.backToStart();
arm.setFsm(ArmFSMState::PASSIVE);
arm.sendRecvThread->shutdown();
//endwin(); // 结束 ncurses
return 0;
}
这里还需要将文件放在z1_sdk的CMakeLists.txt内,重复上述调用SDK操作,即可成功运行。
注:直线运动Linear对位姿的调整,每次只能修改x、y和z中的一个,否则会ERROR。
这篇关于对Unitree宇树Z1机械臂进行SDK修改和调用示例的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






