unitree专题
四足机器人控制算法——建模、控制与实践(unitree_guide配置)
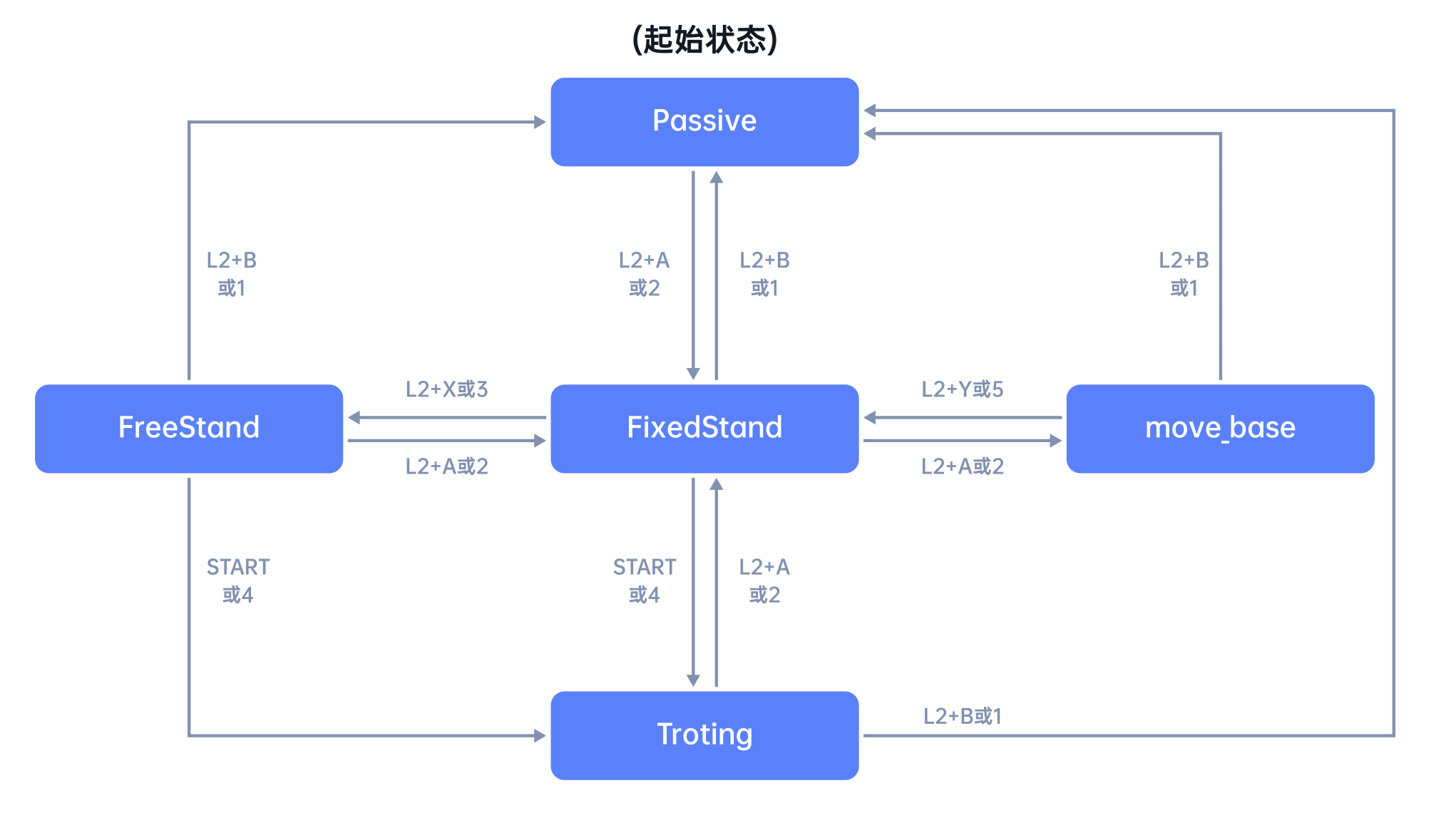
目录 官方文档 unitree_guide 1. 快捷指令 2. ROS安装 3. LCM库安装 3.1. 安装步骤 4. pthread库 5. 工程文件下载 6. 编译 报错: 报错1 报错2: 报错3 其他报错 7. 运行 7.1. 运行 Gazebo 仿真环境 7.2. 启动控制器 8. 简单使用 官方文档 宇树科技 文档中心 四足机器人算法实
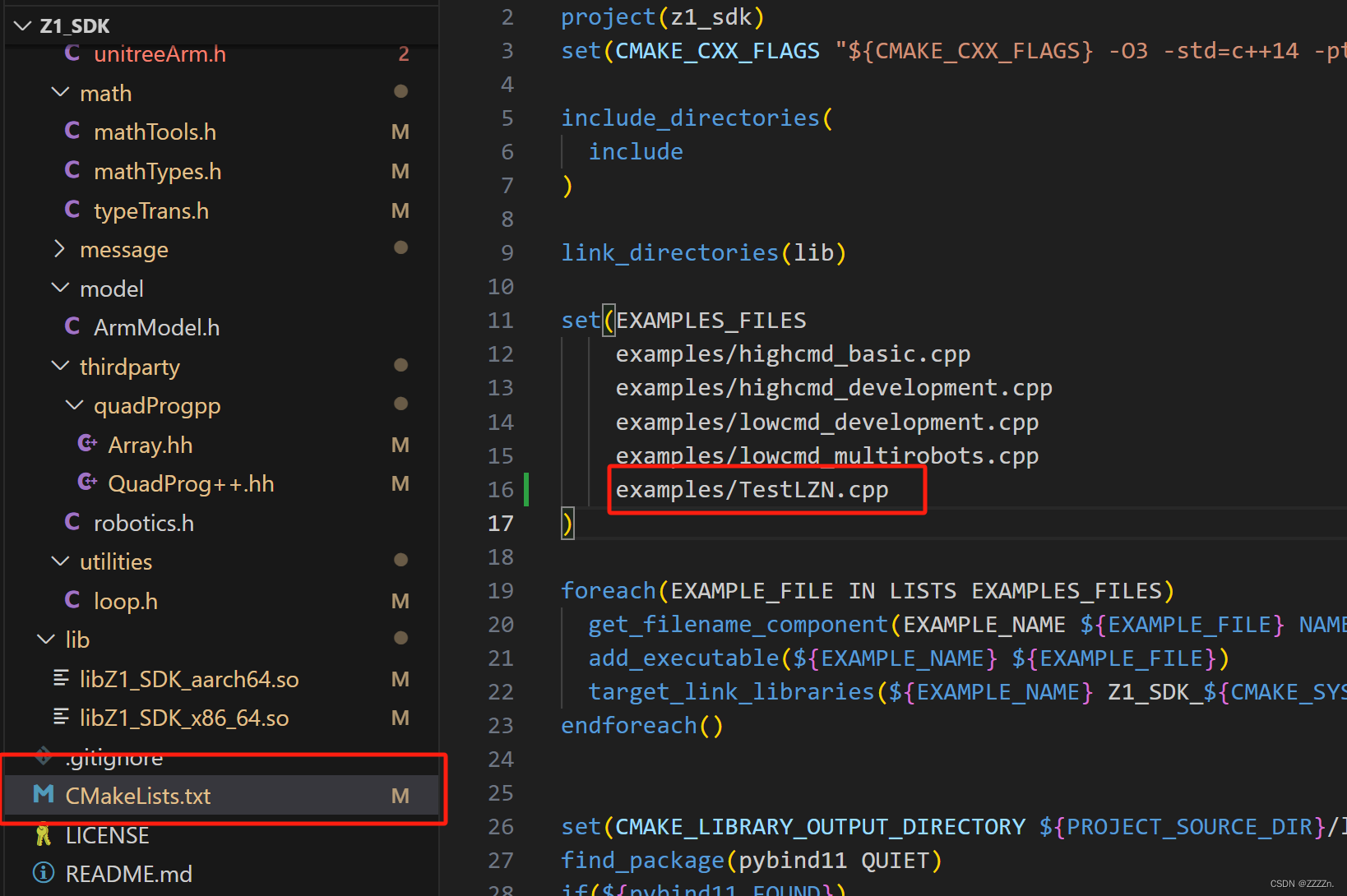
对Unitree宇树Z1机械臂进行SDK修改和调用示例
参考Unitree官方文档 键盘控制 · unitree-docs 修改机械臂IP进行连接 ping机械臂的默认IP(192.168.123.110) 网络不可达,此时需要修改机械臂IP使其与PC在同一局域网内,PC端才可与机械臂正常通信 在这里修改为192.168.123.xxx网段 调用ifconfig查看机械臂修改后的IP,在这里是33端口 调用官方提供的SDK(z

宇树机器人Unitree-go1学习记录-SDK上传、编译和运行
1.SDK上传 先在github上下载好所需SDK,内容如图 接着进入终端,从本地将文件夹传输到目标服务器中也就是go1的运动控制板卡 pi@192.168.12.1,密码123 具体指令:scp【本地文件的路径】【服务器用户名】@【服务器地址】:【服务器上存放文件的路径】 scp -r /home/melodic/unitree

Unitree laikago机器狗仿真
在B站上看到杭州宇树公司研发的机器狗,看到挺有趣的,就去github上下载了laikago的仿真模型代码跑起来look look,下面是配置运行时报的一些错误,在这里记录一下! 本机环境:ubuntu16.04 + ROS Kinetic +gazebo8 新建工作空间并编译 mkdir Laikago/srccd Laikago/srcgit clone https://github.c
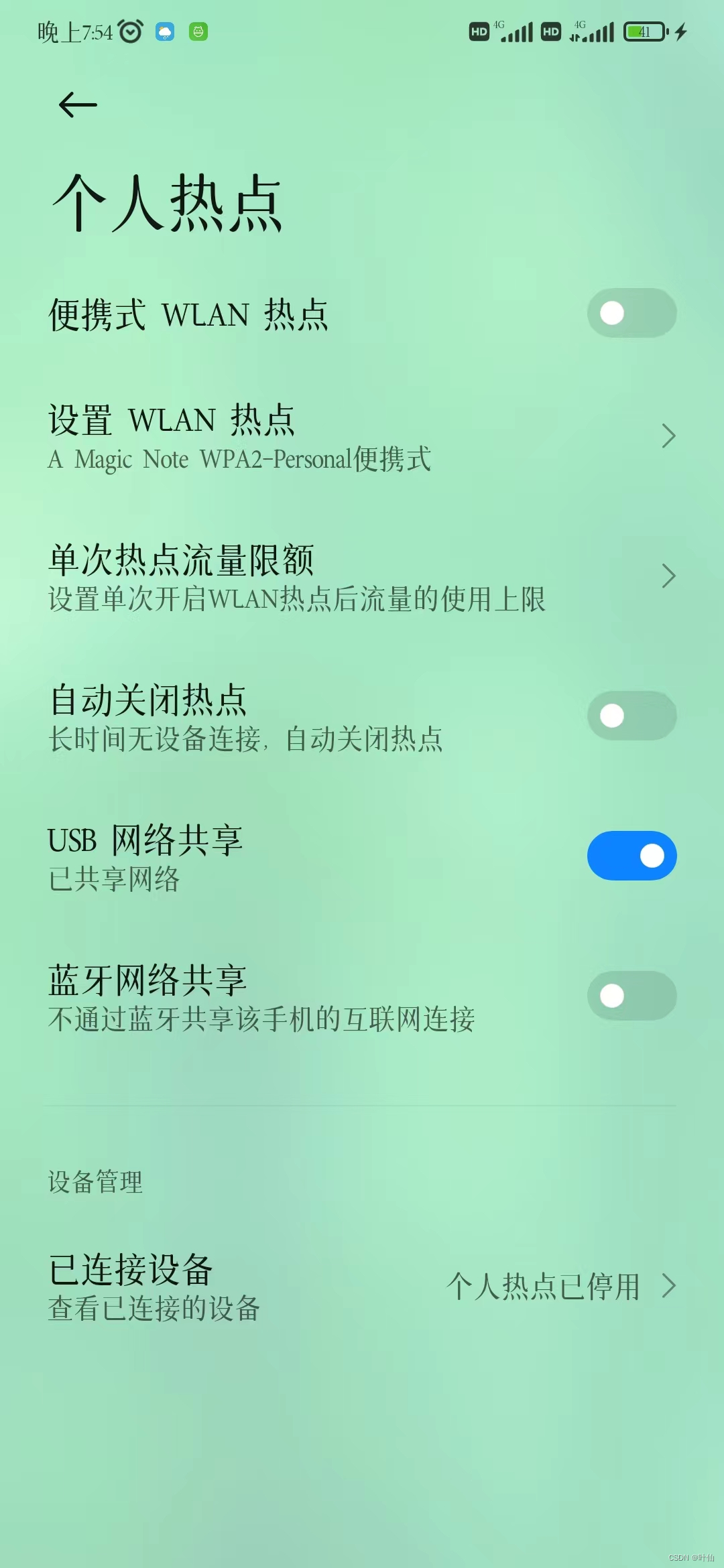
宇树Unitree机器狗连接外网的一种方法
宇树官方提供的方式: 宇树机器狗连接网络的相关说明 (yuque.com) 我这里提供一种我采用的方式,仅供参考: 需要一根手机数据线,能联网的手机 我这里使用的是小米手机,其余手机大概也能行。 如下,是为宇树go1上的15号板子联网 为了在狗身上直接操作,首先,我这里连接了显示屏,鼠标,键盘(由于15号板仅一个usb口,加了个拓展坞) 这些不重要,我们