本文主要是介绍四足机器人控制算法——建模、控制与实践(unitree_guide配置),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
官方文档
unitree_guide
1. 快捷指令
2. ROS安装
3. LCM库安装
3.1. 安装步骤
4. pthread库
5. 工程文件下载
6. 编译
报错:
报错1
报错2:
报错3
其他报错
7. 运行
7.1. 运行 Gazebo 仿真环境
7.2. 启动控制器
8. 简单使用
官方文档
宇树科技 文档中心
- 四足机器人算法实践
- 宇树官方开源
我使用的是Ubuntu 20.04 + ROS noetic 环境。
unitree_guide
1. 快捷指令
如果以下配置都已经完成,直接使用以下三条指令,快速完成Go1的配置:
// 在~/catkin_ws下打开第一个终端
source ./devel/setup.bash
roslaunch unitree_guide gazeboSim.launch// 在~/catkin_ws下打开第二个终端
sudo ./devel/lib/unitree_guide/junior_ctrl2. ROS安装
参考 ROS—1. ROS安装
3. LCM库安装
LCM(Lightweight Communications and Marshalling)是一组用于消息传递和数据编组的库和工具,其基于UDP传输的属性,传输速度较快,其目标是高带宽和低延迟的实时系统。它提供了一种发布/订阅消息传递模型以及带有各种编程语言C++、Java、python等应用程序绑定的自动编组/解组代码生成,LCM通过将消息封装在不同的Channel中进行通信,这点类似于ROS中的Topic。
网址:GitHub - lcm-proj/lcm: Lightweight Communications and Marshalling
LCM Documentation — LCM documentation
LCM库的简单使用-腾讯云开发者社区-腾讯云
3.1. 安装步骤
- 安装编译依赖:
sudo apt-get install build-essential autoconf automake autopoint libglib2.0-dev libtool openjdk-8-jdk python-dev- GitHub上下载releases,我下载的是V1.5.0版本
- 将下载的压缩包解压到:主目录
- 进入
lcm-1.5.0打开终端输入:
mkdir build
cd build
cmake ..
make
make install- 上面完成了LCM的安装。然后告诉系统lib的库所在位置:
export LCM_INSTALL_DIR=/usr/local/lib
sudo sh -c "echo$LCM_INSTALL_DIR> /etc/ld.so.conf.d/lcm.conf"
sudo ldconfig- 配置pkgconfig:
export PKG_CONFIG_PATH=$PKG_CONFIG_PATH:$LCM_INSTALL_DIR/pkgconfig- 以上步骤都完成后:输入指令
lcm-tester以测试是否已经安装 LCM。 若终端显示的内容与下图类似,则表示已经安装 LCM。
4. pthread库
一个多线程库。
运行 getconf GNU_LIBPTHREAD_VERSION 命令以测试是否已经安装pthread库。若可以显示版本信息,则说明 pthread 库已经安装。

5. 工程文件下载
到宇树Github下载这三个文件:
- unitree_guide :
GitHub - unitreerobotics/unitree_guide - unitree_ros :
GitHub - unitreerobotics/unitree_ros - unitree_legged_msgs :
GitHub - unitreerobotics/unitree_ros_to_real
6. 编译
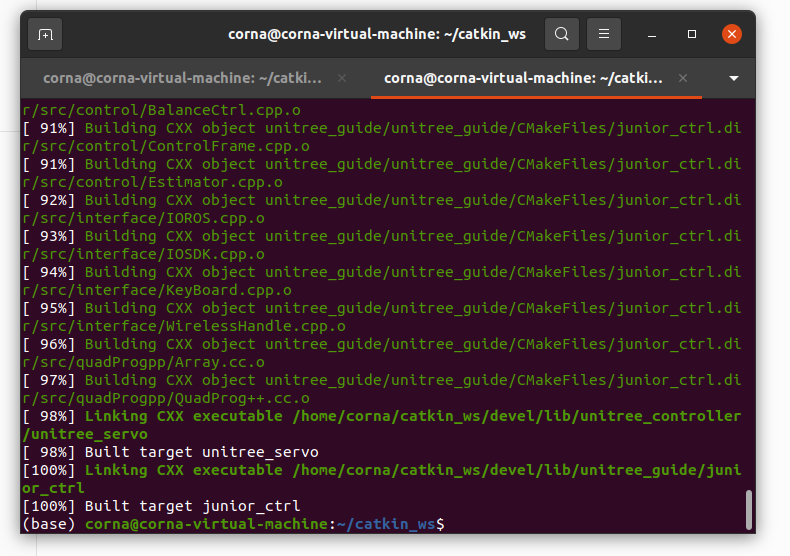
打开一个终端,并将工作路经切换至包含 unitree_guide 工程的 ros 工作空间的根目录下(本文假设该路经为 ~/catkin_ws ),并在终端输入下列命令开始编译该工程: catkin_make
编译通过后,显示如下:进度条100%
如果出现报错,就安装对应的包。
报错:
报错1
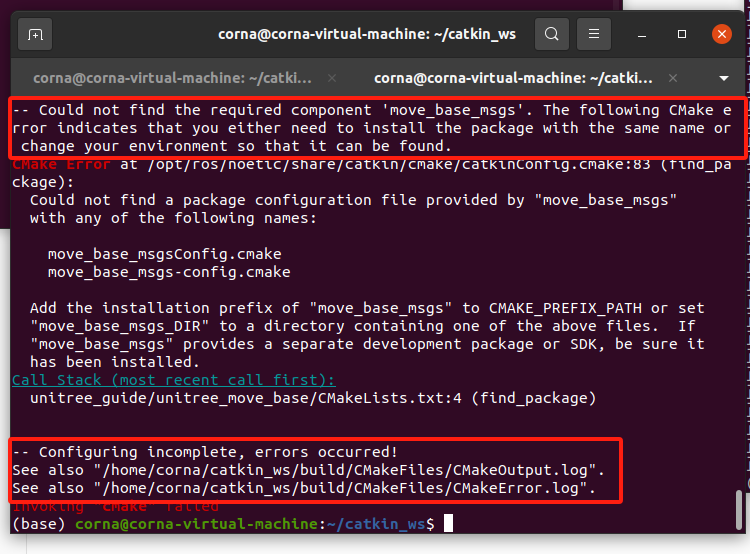
比如出现这个报错:Could not find the required component 'move base msgs'. The followingCMake eror indicates that you either need to install the package with the same name orchange your environment so that it can be found.
原因:此报错是由于move_base_msgs缺失引起的,使用如下命令安装这个功能包:
sudo apt-get install ros-noetic-navigation报错2:
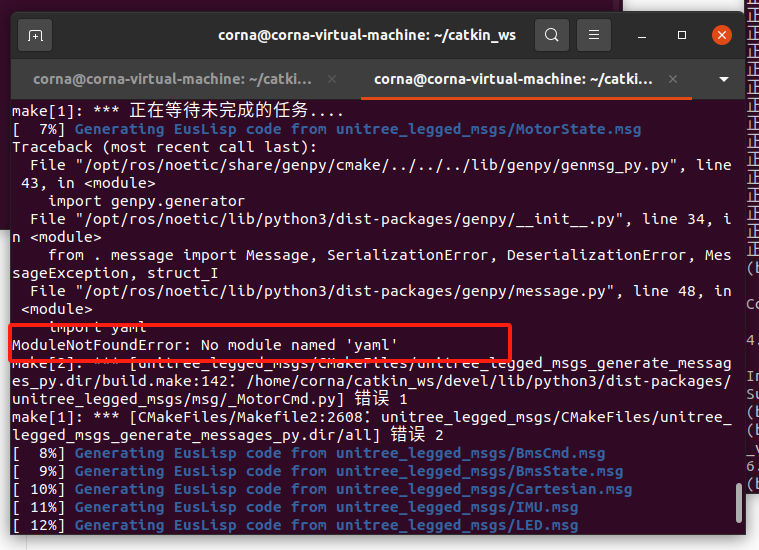
pip3 install pyyaml报错3
出现报错:AttributeError: module 'em' has no attribute 'RAW_OPT'
解决办法:pip3 install empy==3.3.4
其他报错
其他类似报错参考:开源四足机器人代码踩坑指南
7. 运行
7.1. 运行 Gazebo 仿真环境
在同一个终端中,执行下列命令:source ./devel/setup.bash
然后执行下列命令来打开 Gazebo 仿真环境:roslaunch unitree_guide gazeboSim.launch
出现报错:
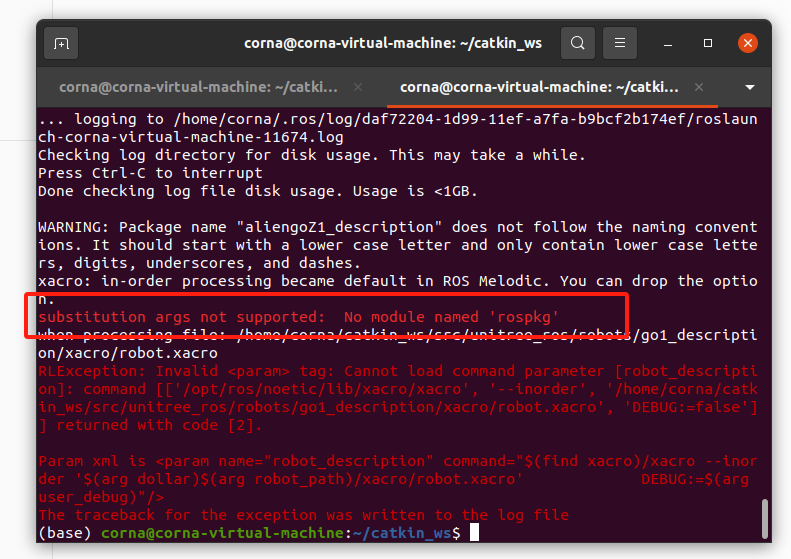
解决方法:
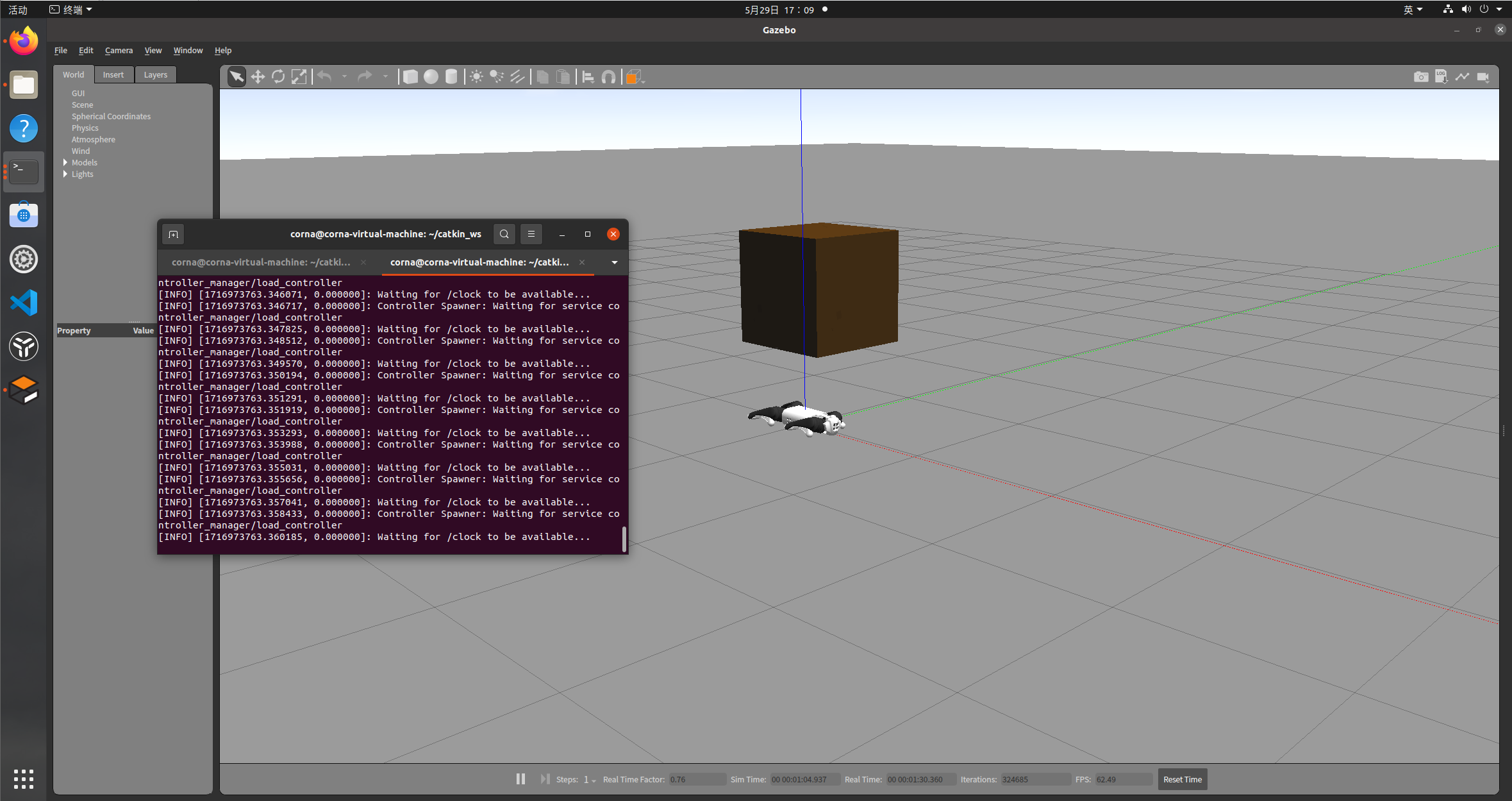
pip3 install rospkg正确运行后,会跳出 Gazebo 仿真器窗口,并且 Go1 机器人会躺在仿真环境中的地面上。要想让机器人动起来,还需要启动控制器。
7.2. 启动控制器
打开另外一个终端,并切换至相同路径下(本文假设该路经为~/catkin_ws ),然后输入下列命令以启动控制器:sudo ./devel/lib/unitree_guide/junior_ctrl
报错:./devel/lib/unitree_guide/junior_ctrl: error while loading shared libraries: libxmlrpcpp.so: cannot open shared object file: No such file or directory
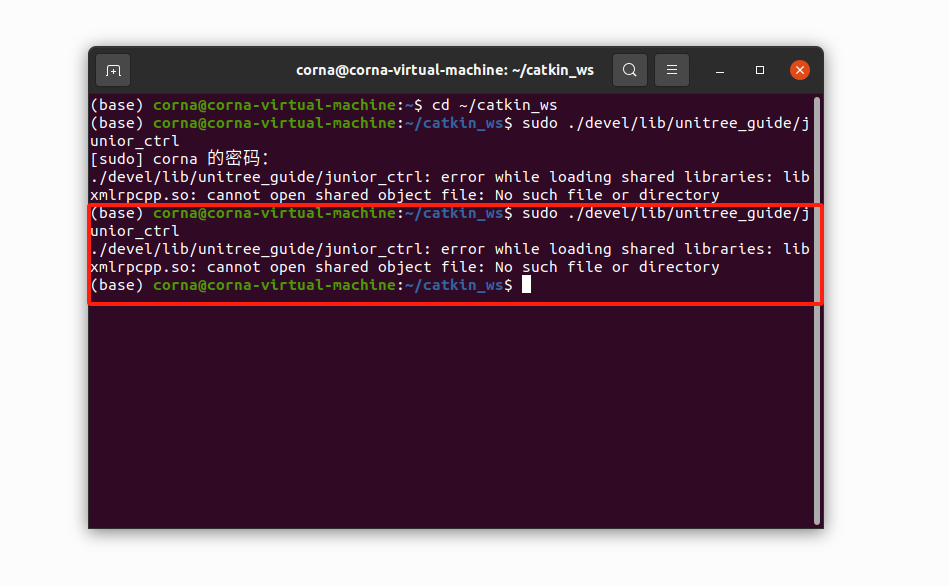
解决方法:宇树科技 文档中心
添加修改:
/opt/ros/noetic/lib
/usr/local/lib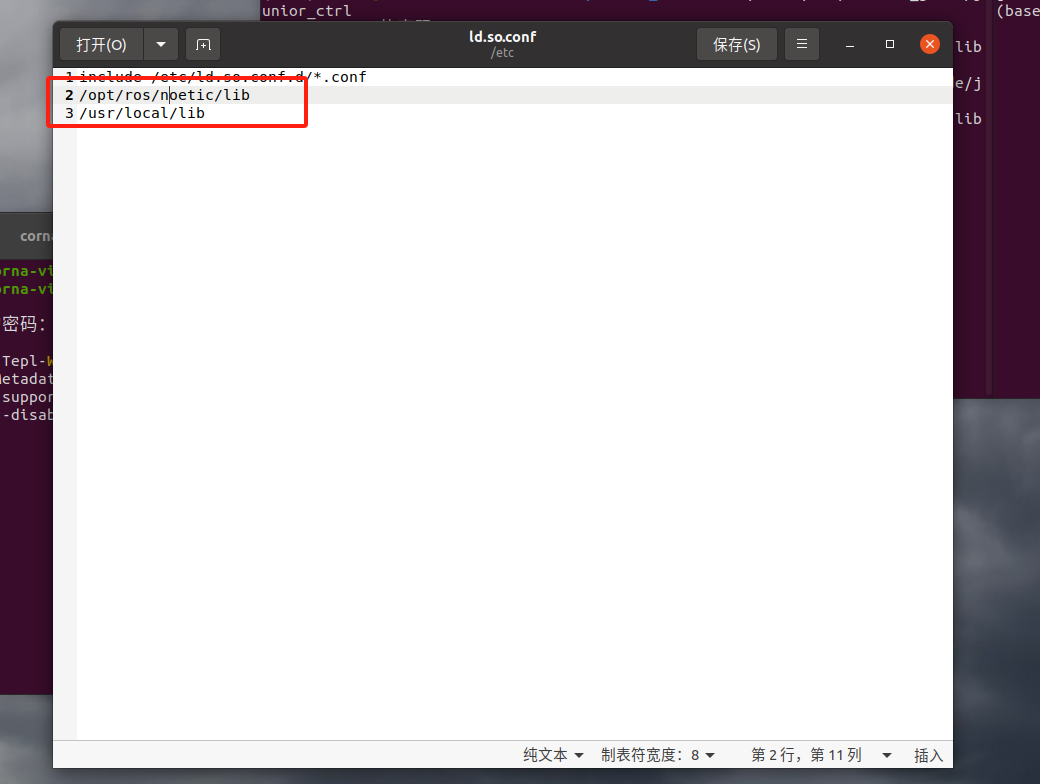
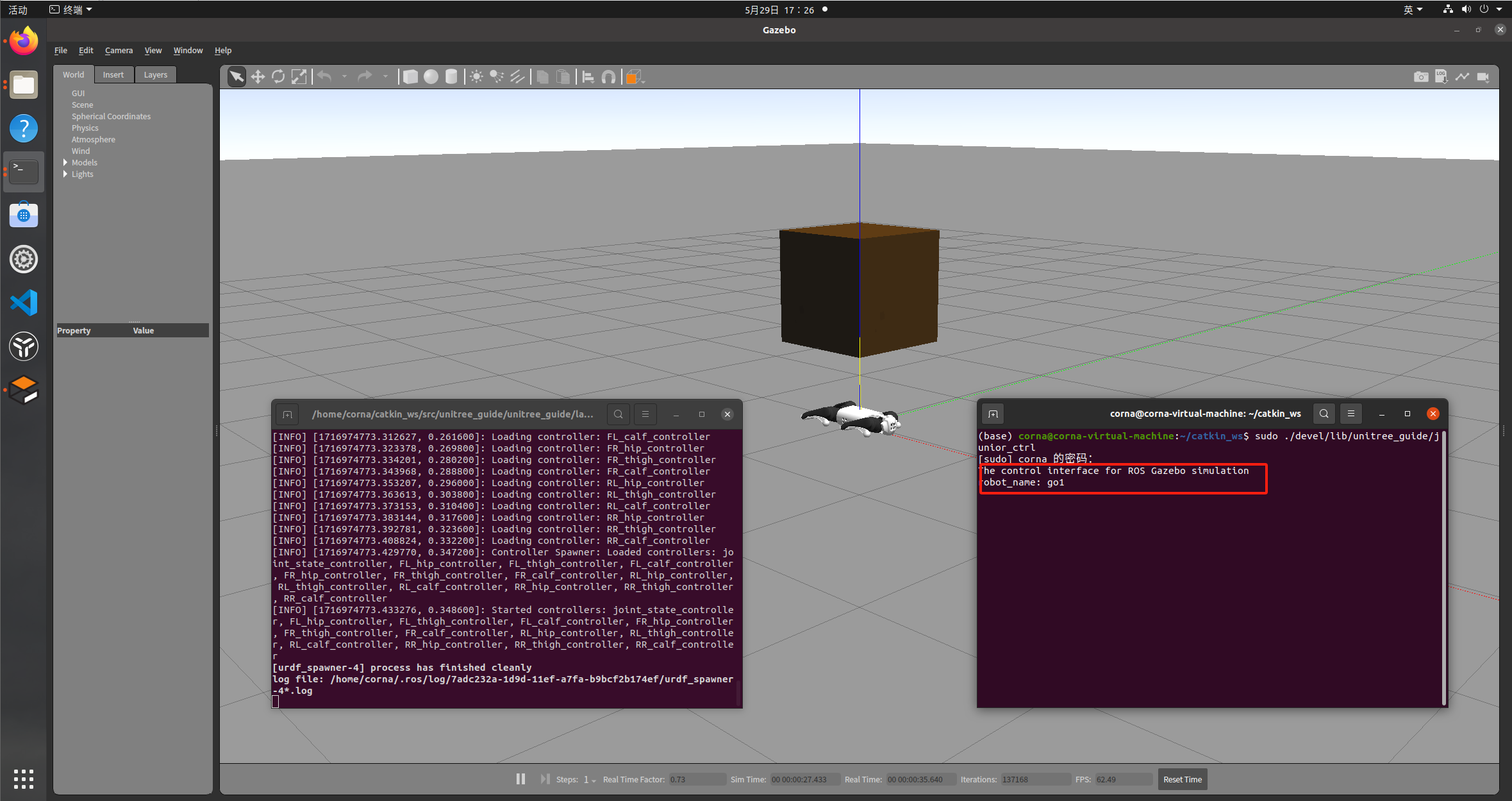
配置成功后,显示:
8. 简单使用
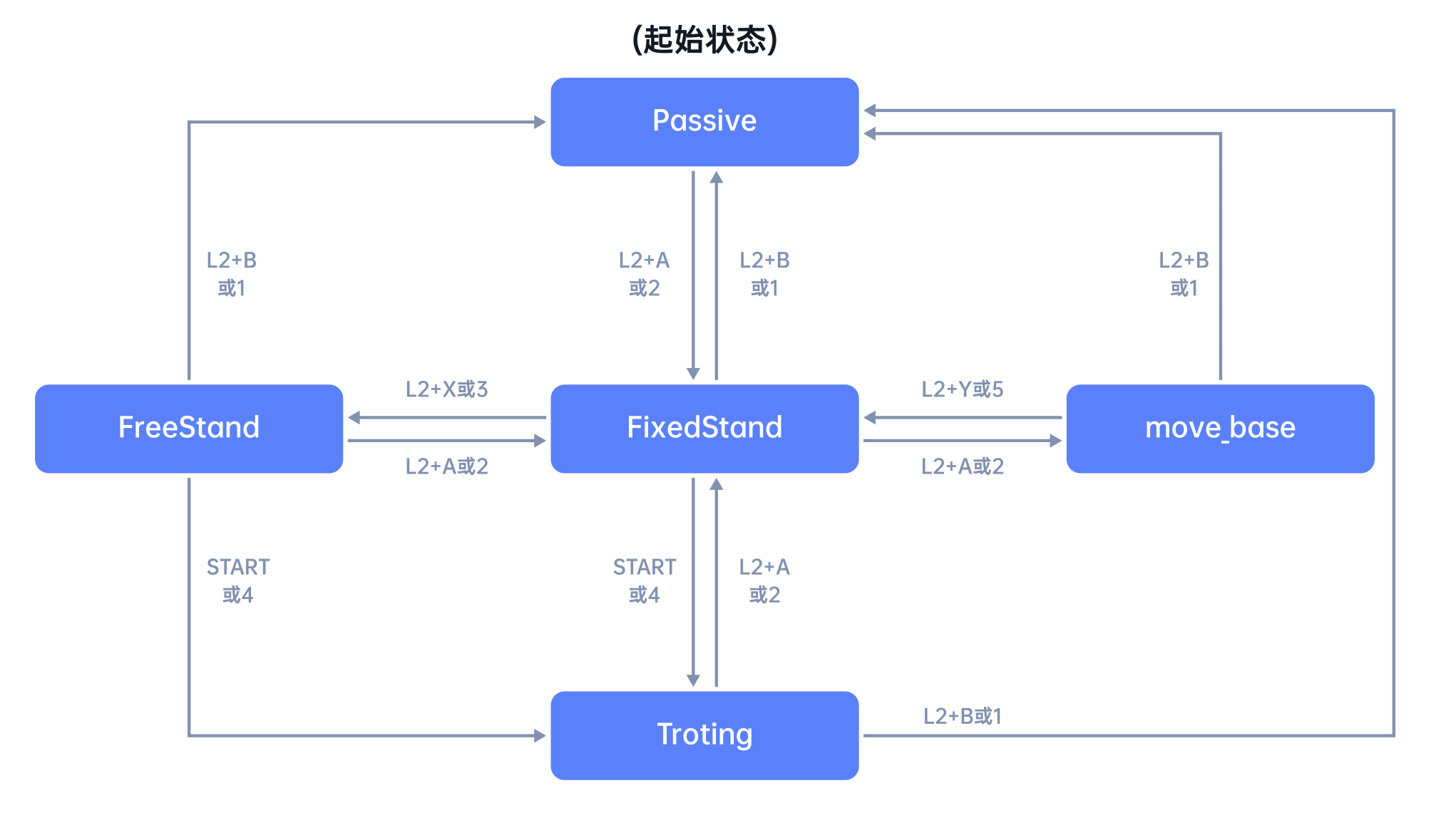
选中在上一步中用来启动控制器的终端,然后按下键盘上的 “2” 键。此时在 Gazebo 环境中的机器人会站起来,同时终端会显示:
“Switched from passive to fixed stand”
在仿真环境中,按下键盘上的 W A S D 键 分别控制机器人 前进 左平移 后腿 右平移。按下键盘上的 J L 键 分别控制机器人 左转 右转。
这篇关于四足机器人控制算法——建模、控制与实践(unitree_guide配置)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






