控制算法专题

三相直流无刷电机(BLDC)控制算法实现:BLDC有感启动算法思路分析
一枚从事路径规划算法、运动控制算法、BLDC/FOC电机控制算法、工控、物联网工程师,爱吃土豆。如有需要技术交流或者需要方案帮助、需求:以下为联系方式—V 方案1:通过霍尔传感器IO中断触发换相 1.1 整体执行思路 霍尔传感器U、V、W三相通过IO+EXIT中断的方式进行霍尔传感器数据的读取。将IO口配置为上升沿+下降沿中断触发的方式。当霍尔传感器信号发生发生信号的变化就会触发中断在中断

【自动驾驶】控制算法(八)横向控制Ⅱ | Carsim 与 Matlab 联合仿真基本操作
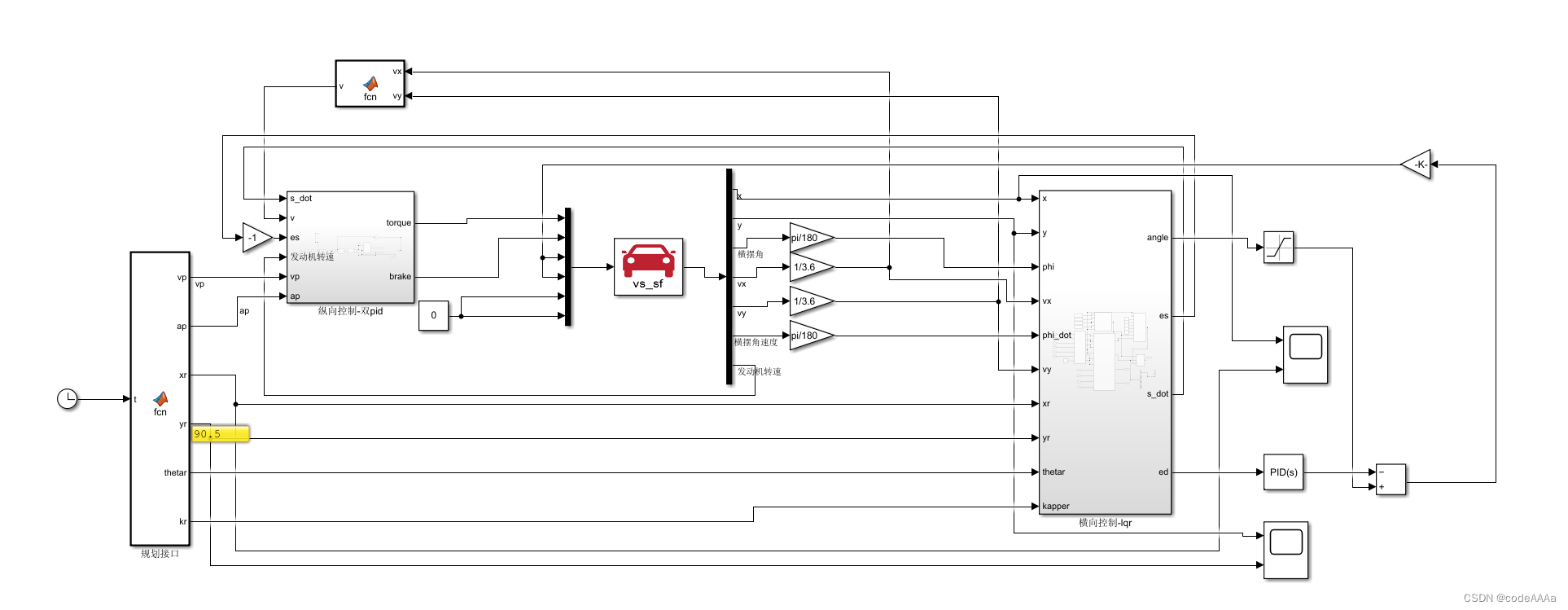
写在前面: 🌟 欢迎光临 清流君 的博客小天地,这里是我分享技术与心得的温馨角落。📝 个人主页:清流君_CSDN博客,期待与您一同探索 移动机器人 领域的无限可能。 🔍 本文系 清流君 原创之作,荣幸在CSDN首发🐒 若您觉得内容有价值,还请评论告知一声,以便更多人受益。 转载请注明出处,尊重原创,从我做起。 👍 点赞、评论、收藏,三连走一波,让我们一起养成好习惯😜 在这里,您将

基于PI控制算法的异步感应电机转速控制系统simulink建模与仿真
目录 1.课题概述 2.系统仿真结果 3.核心程序与模型 4.系统原理简介 5.完整工程文件 1.课题概述 基于PI控制算法的异步感应电机转速控制系统simulink建模与仿真。PI控制器是一种经典的线性控制器,它通过将控制量的比例部分和积分部分相结合来实现对系统输出的调节。比例部分用于快速响应偏差,而积分部分则用于消除稳态误差。 2.系统仿真结果 (完整程

【控制算法 数据处理】一阶滤波算法
简单介绍: 一阶滤波算法是比较常用的滤波算法,它的滤波结果=a*本次采样值+(1-a)*上次滤波结果,其中,a为0~1之间的数。一阶滤波相当于是将新的采样值与上次的滤波结果计算一个加权平均值。a的取值决定了算法的灵敏度,a越大,新采集的值占的权重越大,算法越灵敏,但平顺性差;相反,a越小,新采集的值占的权重越小,灵敏度差,但平顺性好。优点是对周期干扰有良好的抑制作用,适用于波动频率比较高的场合,它

带死区的PID控制算法
带死区的PID控制算法 带死区的PID控制算法: 注:本文内容摘自《先进PID控制MATLAB仿真(第4版)》刘金琨 编著,研读此书受益匪浅,感谢作者! 带死区的PID控制算法: 在计算机控制系统中,某些系统为了避免控制作用过于频繁,消除由于频繁动作所引起的震荡,可采用带死区的PID控制算法,控制算式为: e ( k ) = { 0 ∣ e ( k ) ∣ ≤ ∣ e 0
微分先行PID控制算法
微分先行PID控制算法 微分先行PID控制算法: 注:本文内容摘自《先进PID控制MATLAB仿真(第4版)》刘金琨 编著,研读此书受益匪浅,感谢作者! 微分先行PID控制算法: 微分先行PID控制结构,其特点是只对输出量 y ( k ) y(k) y(k)进行微分,而对给定值 y d ( k k ) y_d(kk) yd(kk)不做微分。这样,在改变给定值时,输出不会改变
不完全微分PID控制算法
不完全微分PID控制算法 注:本文内容摘自《先进PID控制MATLAB仿真(第4版)》刘金琨 编著,研读此书受益匪浅,感谢作者! 在PID控制中,微分信号的引入可改善系统的动态特性,但也容易引起高频干扰,在误差扰动突变时尤其显出微分项的不足。若在控制算法中加入低通滤波器,则可以使系统性能得到改善。 克服上述缺点的方法之一是在PID算法中加入一个一阶惯性环节(低通滤波器) G f

变速积分PID控制算法
变速积分PID控制算法 变速积分PID控制算法:变速积分PID的基本思想:变速积分的PID积分项表达式: 注:本文内容摘自《先进PID控制MATLAB仿真(第4版)》刘金琨 编著,研读此书受益匪浅,感谢作者! 变速积分PID控制算法: 在普通的PID控制算法中,由于积分系数 k i k_i ki是常数,所以在整个控制过程中,积分增量不变。而系统对积分项的要求是,系统偏差大
梯形积分PID控制算法
梯形积分PID控制算法 梯形积分PID控制算法: 注:本文内容摘自《先进PID控制MATLAB仿真(第4版)》刘金琨 编著,研读此书受益匪浅,感谢作者! 梯形积分PID控制算法: 在PID控制律中积分项的作用是消除余差,为了减小余差,应提高积分项的运算精度,为此,可将矩形积分改为梯形积分。梯形积分的计算公式: ∫ 0 t e ( t ) d t = ∑ i = 0 k e
抗积分饱和PID控制算法
抗积分饱和PID控制算法 抗积分饱和PID控制算法:1.积分饱和现象:2.抗积分饱和算法: 注:本文内容摘自《先进PID控制MATLAB仿真(第4版)》刘金琨 编著,研读此书受益匪浅,感谢作者! 抗积分饱和PID控制算法: 1.积分饱和现象: 所谓积分饱和现象是指若系统存在一个方向偏差,PID控制器的输出由于积分作用的不断累加而加大,从而导致执行机构到达极限位置 X m
积分分离PID控制算法
积分分离PID控制算法 积分分离PID控制:积分分离控制基本思路:积分分离控制算法表示:积分分离式PID控制算法程序流程图: 注:本文内容摘自《先进PID控制MATLAB仿真(第4版)》刘金琨 编著,研读此书受益匪浅,感谢作者! 积分分离PID控制: 在普通的PID控制中引入积分环节的目的,主要为了消除静差,提高控制精度。但在过程启动、结束或大幅度增减设定时,短时间内系统输出
构建STM32智能平衡车项目:PID控制算法与蓝牙通信技术
一、项目概述 项目目标和用途 本项目旨在设计和实现一款基于STM32单片机的平衡车。平衡车是一种新型的个人交通工具,广泛应用于短途出行、休闲娱乐等场景。通过本项目,我们希望能够实现一款具备良好稳定性和操控性的平衡车,能够在不同的地形上自如行驶。 解决的问题和带来的价值 平衡车的核心问题在于如何保持其平衡。传统的平衡车往往依赖于复杂的控制算法和高精度的传感器。通过本项目,我们将利用STM32
PID控制算法(C语言代码)
PID控制(比例-积分-微分控制)是一种常用的控制算法,用于自动化控制系统中。下面是一个简单的PID控制算法的C语言实现示例。这个示例展示了如何定义一个PID控制器,并在主程序中使用它。 #include <stdio.h>// PID控制器结构体typedef struct {float kp; // 比例系数float ki; // 积分系数float kd;

【自动驾驶】控制算法(七)离散规划轨迹的误差计算
写在前面: 🌟 欢迎光临 清流君 的博客小天地,这里是我分享技术与心得的温馨角落。📝 个人主页:清流君_CSDN博客,期待与您一同探索 移动机器人 领域的无限可能。 🔍 本文系 清流君 原创之作,荣幸在CSDN首发🐒 若您觉得内容有价值,还请评论告知一声,以便更多人受益。 转载请注明出处,尊重原创,从我做起。 👍 点赞、评论、收藏,三连走一波,让我们一起养成好习惯😜 在这里,您将

TCP拥塞控制算法BBR源码分析
BBR是谷歌与2016年提出的TCP拥塞控制算法,在Linux4.9的patch中正式加入。该算法一出,瞬间引起了极大的轰动。在CSDN上也有众多大佬对此进行分析讨论,褒贬不一。 本文首先对源码进行了分析,并在此基础上对BBR算法进行总结。 1.源码分析 /* Bottleneck Bandwidth and RTT (BBR) congestion control** BBR co
四足机器人控制算法——建模、控制与实践(unitree_guide配置)
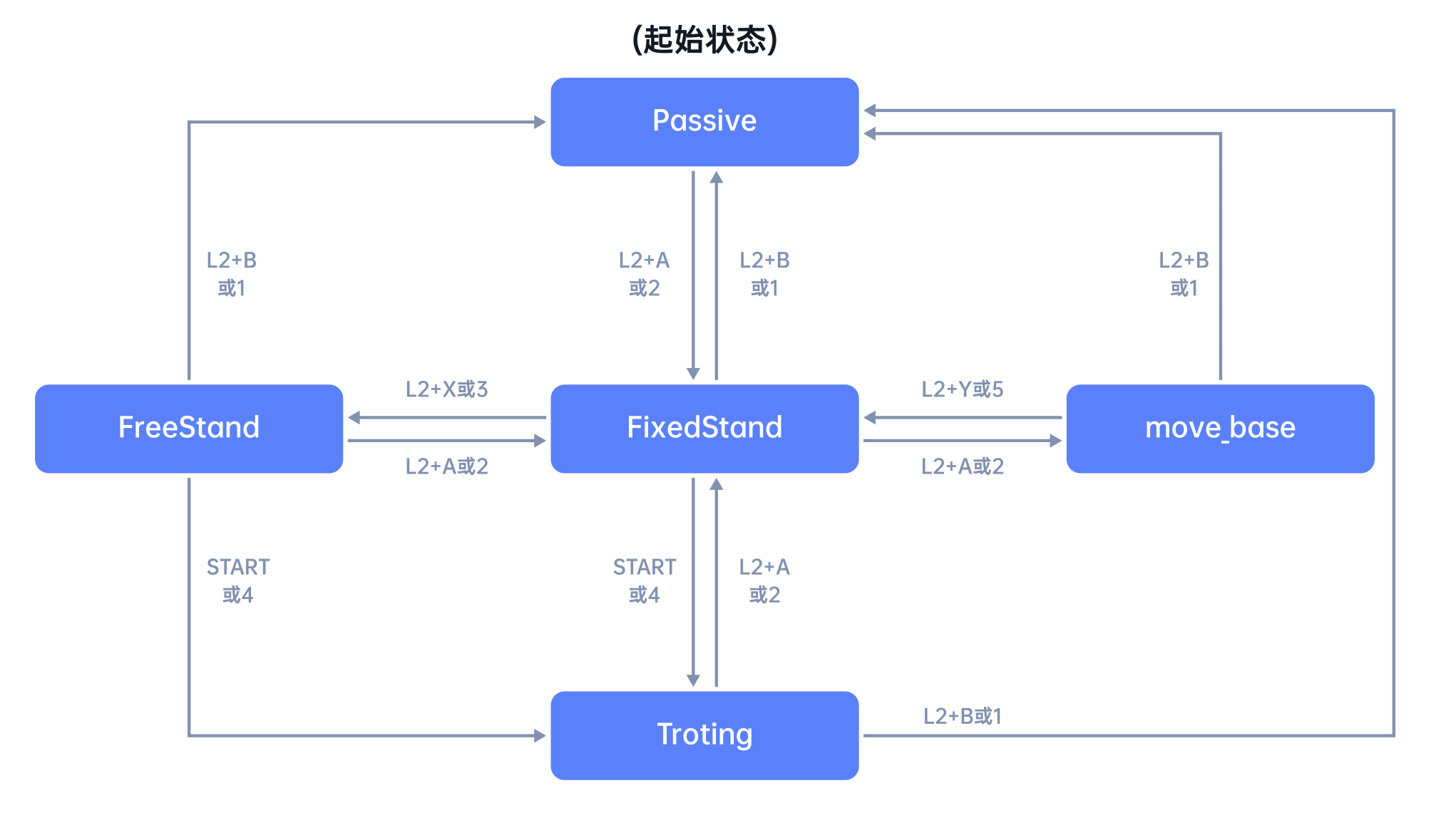
目录 官方文档 unitree_guide 1. 快捷指令 2. ROS安装 3. LCM库安装 3.1. 安装步骤 4. pthread库 5. 工程文件下载 6. 编译 报错: 报错1 报错2: 报错3 其他报错 7. 运行 7.1. 运行 Gazebo 仿真环境 7.2. 启动控制器 8. 简单使用 官方文档 宇树科技 文档中心 四足机器人算法实

永磁同步电机高性能控制算法(13)后续篇—— 基于高阶扩张状态观测器(ESO)的无模型预测控制(MFPC)
1.前言 前文已经介绍过了高阶ESO相对于传统ESO的优势。 https://zhuanlan.zhihu.com/p/703039702https://zhuanlan.zhihu.com/p/703039702 但是当时搭的ESO有点问题。把公式修正之后,发现前文用的改进四阶ESO无法使用。 今天来解释一下为什么改进4阶ESO无法使用。 2.为什么改进4阶ESO用不了? %扩展观测

【自动驾驶】控制算法(五)连续方程离散化与离散LQR原理
写在前面: 🌟 欢迎光临 清流君 的博客小天地,这里是我分享技术与心得的温馨角落。📝 个人主页:清流君_CSDN博客,期待与您一同探索 移动机器人 领域的无限可能。 🔍 本文系 清流君 原创之作,荣幸在CSDN首发🐒 若您觉得内容有价值,还请评论告知一声,以便更多人受益。 转载请注明出处,尊重原创,从我做起。 👍 点赞、评论、收藏,三连走一波,让我们一起养成好习惯😜 在这里,您将

【自动驾驶】控制算法(四)坐标变换与横向误差微分方程
写在前面: 🌟 欢迎光临 清流君 的博客小天地,这里是我分享技术与心得的温馨角落。📝 个人主页:清流君_CSDN博客,期待与您一同探索 移动机器人 领域的无限可能。 🔍 本文系 清流君 原创之作,荣幸在CSDN首发🐒 若您觉得内容有价值,还请评论告知一声,以便更多人受益。 转载请注明出处,尊重原创,从我做起。 👍 点赞、评论、收藏,三连走一波,让我们一起养成好习惯😜 在这里,您将
嵌入式智能移动机器人导航系统:状态空间控制算法、路径规划算法、PID控制算法(代码示例)
一、项目概述 随着科技的发展,智能机器人在各个领域的应用越来越广泛。本文介绍一个智能移动机器人导航系统的设计与实现,旨在通过状态空间控制与约束满足算法,确保机器人在动态环境中安全、平稳地导航。该系统的主要目标是解决机器人在复杂环境中自主移动的问题,提高其导航的安全性和效率。通过本项目,用户可以了解到如何设计一个具有自主导航能力的智能机器人,并应用于服务机器人和无人机等场景。 #mermai

基于LQR控制算法的电磁减振控制系统simulink建模与仿真
目录 1.课题概述 2.系统仿真结果 3.核心程序与模型 4.系统原理简介 5.完整工程文件 1.课题概述 基于LQR控制算法的电磁减振控制系统simulink建模与仿真。仿真输出控制器的收敛曲线。 2.系统仿真结果 3.核心程序与模型 版本:MATLAB2022a 08_029m 4.系统原理简介 电磁减振控制系统采用线性二次型调节器
基于电导增量MPPT控制算法的光伏发电系统simulink建模与仿真
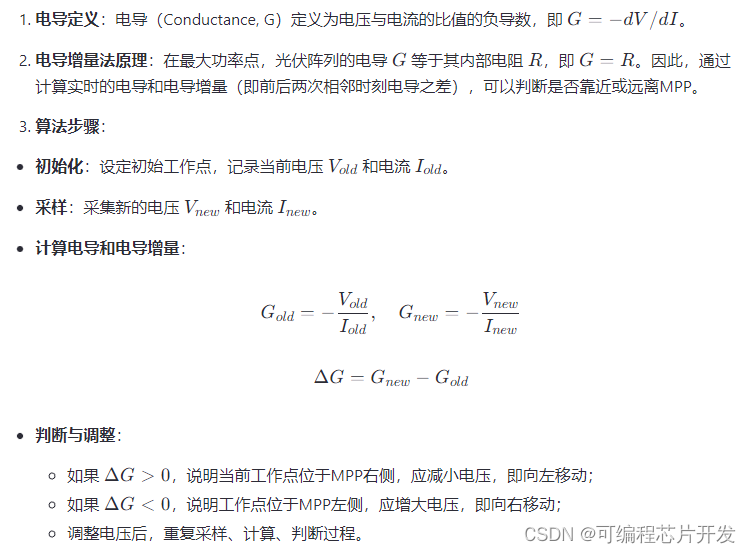
目录 1.课题概述 2.系统仿真结果 3.核心程序与模型 4.系统原理简介 5.完整工程文件 1.课题概述 基于电导增量MPPT控制算法的光伏发电系统simulink建模与仿真。输出MPPT跟踪后的系统电流,电压以及功率。 2.系统仿真结果 3.核心程序与模型 版本:MATLAB2022a 65 4.系统原理简介 电导增
让WSL内核使用BBR拥塞控制算法
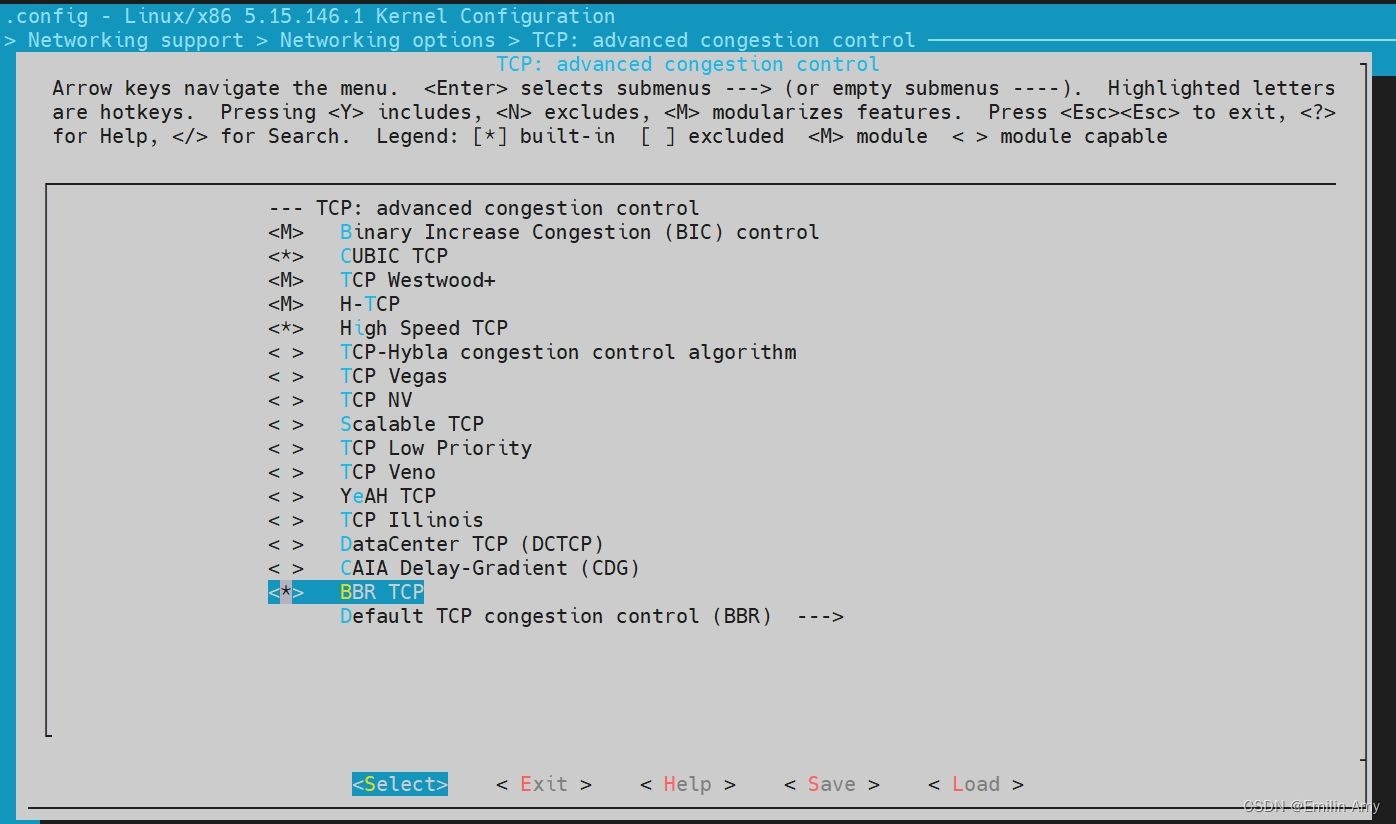
使用git命令从Linux内核的Git仓库中获取源代码,$ git clone --depth 1 https://github.com/microsoft/WSL2-Linux-Kernel.git,找到对应的内核版本$ git log --grep="5.15.146.1-microsoft-standard-WSL2",回退到本机安装的内核版本$ git checkout <commit-
安装新版的Ubuntu WSL以使能BBR拥塞控制算法
【多次尝试成功的方案】通过> wsl - -list -online列出可以安装的版本,用命令> wsl --install -d Ubuntu-24.04 安装。 【未成功的方案】通过挂在ubuntu24.04.iso到E盘后,用命令> wsl --import Ubuntu24.04 C:\WSL\Ubuntu24.04\ E:\ --version 2安装。
自动驾驶纵向控制算法
本文来源——b站忠厚老实的老王,链接:忠厚老实的老王投稿视频-忠厚老实的老王视频分享-哔哩哔哩视频 (bilibili.com),侵删。 功率和转速之间的关系就是:功率P等于转矩M乘以转速ω。并不是油门越大加速度就越大。 发动机和电机的转速扭矩图对比: 电机的效率一般可以高达百分之九十,在高速区一般是遵循P=Fv的关系。 无人驾驶车辆一般在电车上面部署,这里只需要弄清楚电机的
Google 实时流拥塞控制算法GCC
1、简介 参考:https://tools.ietf.org/html/draft-ietf-rmcat-gcc-02#section-4.4 gcc是google实时流拥塞控制算法的简称,已经在webrtc中实现,应用于chrome,后面将应用到Hangouts(视频聊天产品)中,主要用于视频流的拥塞控制。 网络瓶颈主要发生在中间的传输设备上,比如路由器,所以如果有中间设备的帮助(ECN)