本文主要是介绍宇树L1 RM激光雷达初试用,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
设备开箱


如上,包括:雷达设备、电源适配器、转换板和ISB线。

雷达重量为227g
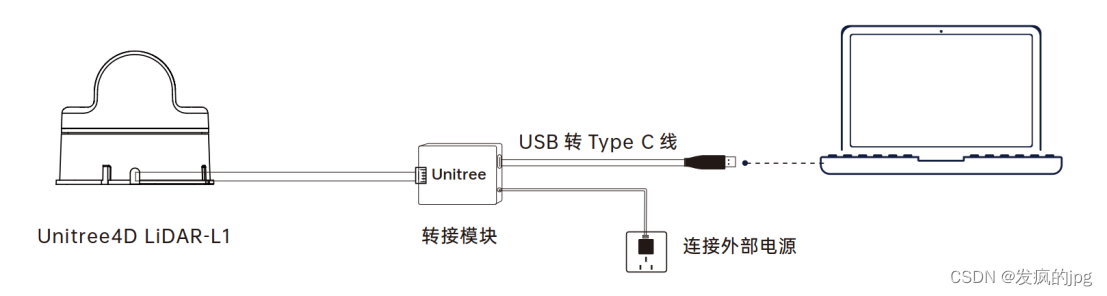
硬件连接
按下图连接好设备后,可在电脑上安装软件查看点云效果
ROS驱动安装
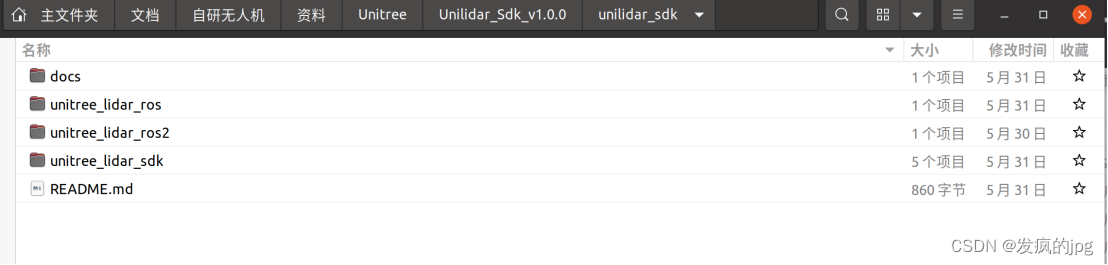
官网下载Unilidar_Sdk_v1.0.0.zip,解压后如下:
安装步骤:
1、先安装unitree_lidar_sdk
安装步骤在unitree_lidar_sdk/README.md中有说明:
cd unitree_lidar_sdk
mkdir build && cd build
cmake ..
make -j22、再编译unitree_lidar_ros
若跳过unitree_lidar_sdk,会出现以下错误:
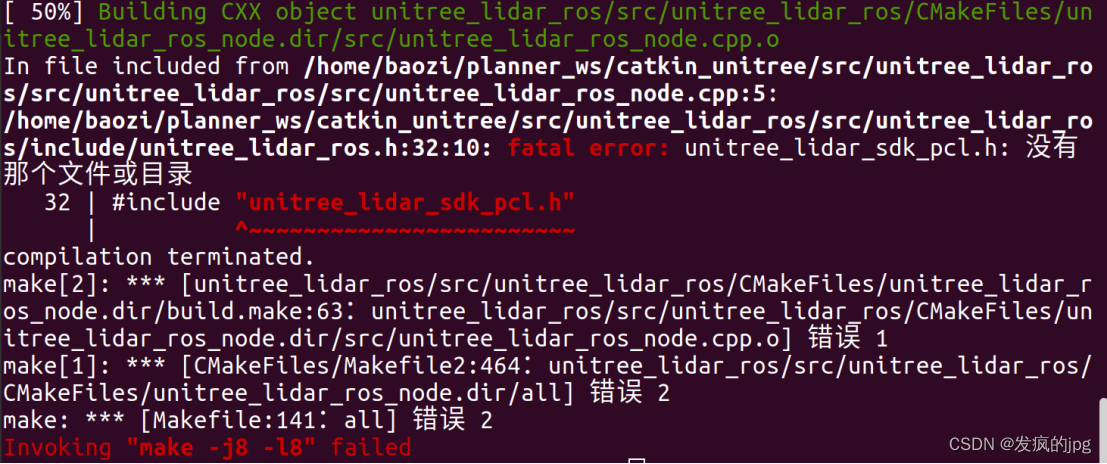
安装步骤在unitree_lidar_ros/src/README.md中有说明:
mkdir -p catkin_ws/src
git clone https://github.com/unitreerobotics/unilidar_sdk.git
cd unilidar_sdk/unitree_lidar_ros
catkin_makeDEMO运行
运行以下launch示例,即可在RVIZ中查看到原始点云数据:
source devel/setup.bash
roslaunch unitree_lidar_ros run.launch运行效果如下:
宇树L1 RM雷达试用
个人感觉声音和振动都有点大,难怪给了个海绵垫。。。
这篇关于宇树L1 RM激光雷达初试用的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







