本文主要是介绍四足机器人在电力巡检领域的应用优势与局限,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
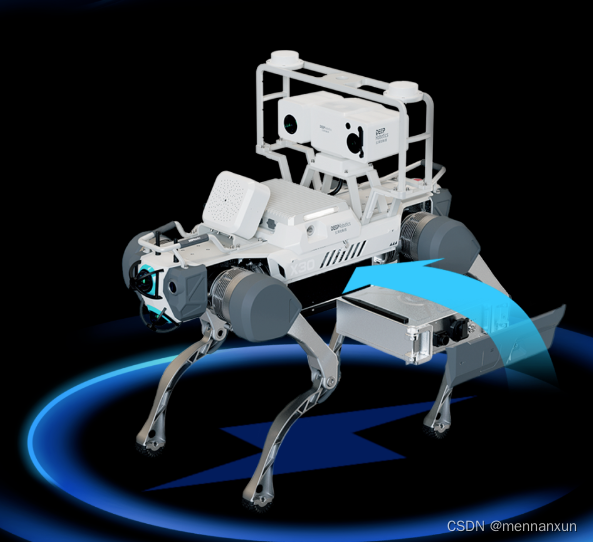
四足机器人在电力巡检领域的应用优势与局限 | 近两年国网、南网对于四足机器人在电力上的巡检应用研究热度不断提升,最近杭州云深处科技推出了X30,其携带四枚MID360激光雷达,地形感知能力十分强悍,暴力的解决了困扰四足机器人多年的稳定上下楼梯问题。宇树科技也迅速推出对标产品B2,宣传视频上其在楼梯上的超强稳定性让人印象深刻。
然而,在电力领域该类机器人的稳定应用仍有巨大的挑战:
首先,是本体平台长期运行的可靠性,四足机器人的最大优势在于环境的适应能力,但环境适应能力需要在各种场景下充分打磨,当前机器人的应用场景和应用案例仍集中在几个局部的典型环境上,电机、导航系统、控制系统一点点小的故障就可能导致整个本体平台的严重损伤。
其次,在于感知平台可靠性及操作平台的智能化,说到底,机器人是用来帮人干活的,轮式机器人上面常常搭载的双光云台、麦克风矩阵、毫米波雷达等在足式平台上面临高强度、高频率的冲击震动,正常观测已经十分困难,寿命更是不到轮式平台的1/3,而配套的AI感知算法如何与四足平台做深度适配也需大量的数据集进行训练。
最后,相对轮式平台,普通四足机器人需要12个以上关节电机,且这些电机通常不会工作在额定值范围,这些电机低效工作导致巨大能量浪费与发热,对电源及电机散热均带来巨大挑战。

这篇关于四足机器人在电力巡检领域的应用优势与局限的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




