本文主要是介绍制作一个空间连杆四足【内附资料下载链接】,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1. 运动功能说明
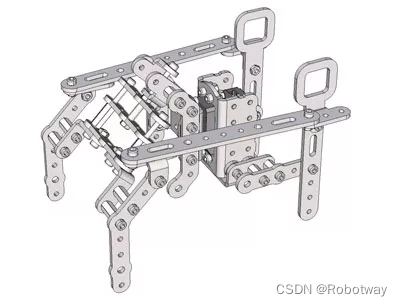
空间连杆四足的主要结构是一套欠驱动的空间连杆组,可以被动适应不平整的地面。它只包含一个舵机,通过舵机的摆动可以实现向前爬行。


2. 结构说明
仅仅使用了一个电机,采取欠驱动设计方案,因此其四肢有一定的松散空间,遇到地面不平可以自动适应。欠驱动的设计思路一方面保证了它的自适应性,另一方面减少了冗余的电机,使其更加节能。在连杆组的作用下,爬行姿态非常自然。
3. 运动功能实现
本样机只需要舵机摆动即可实现行走,控制方法请参考【U002】如何驱动模拟舵机,以及【M002】舵机关节模组。
4. 资料下载
资料内容:样机3D文件
下载途径:空间连杆四足
这篇关于制作一个空间连杆四足【内附资料下载链接】的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





