连杆专题
![[3.2] 机器人连杆变换和运动学方程](https://i-blog.csdnimg.cn/direct/81217c6b578c44bdae31d252d0541f96.png)
[3.2] 机器人连杆变换和运动学方程
本节首先推导相邻两连杆坐标系之间的变换矩阵,然后将这些变换矩阵依次相乘,得到操作臂的运动学方程。该方程表示末端连杆相对于基座的位姿关系,是各关节变量的函数。 连杆坐标系{i}与{i-1}通过四个参数、、、联系起来,因此坐标系{i}相对于{i-1} 的齐次变换矩阵T,通常也是连
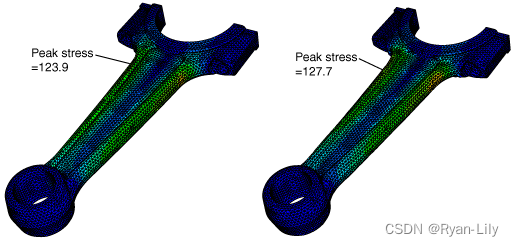
连杆的形状优化-abaqus操作过程
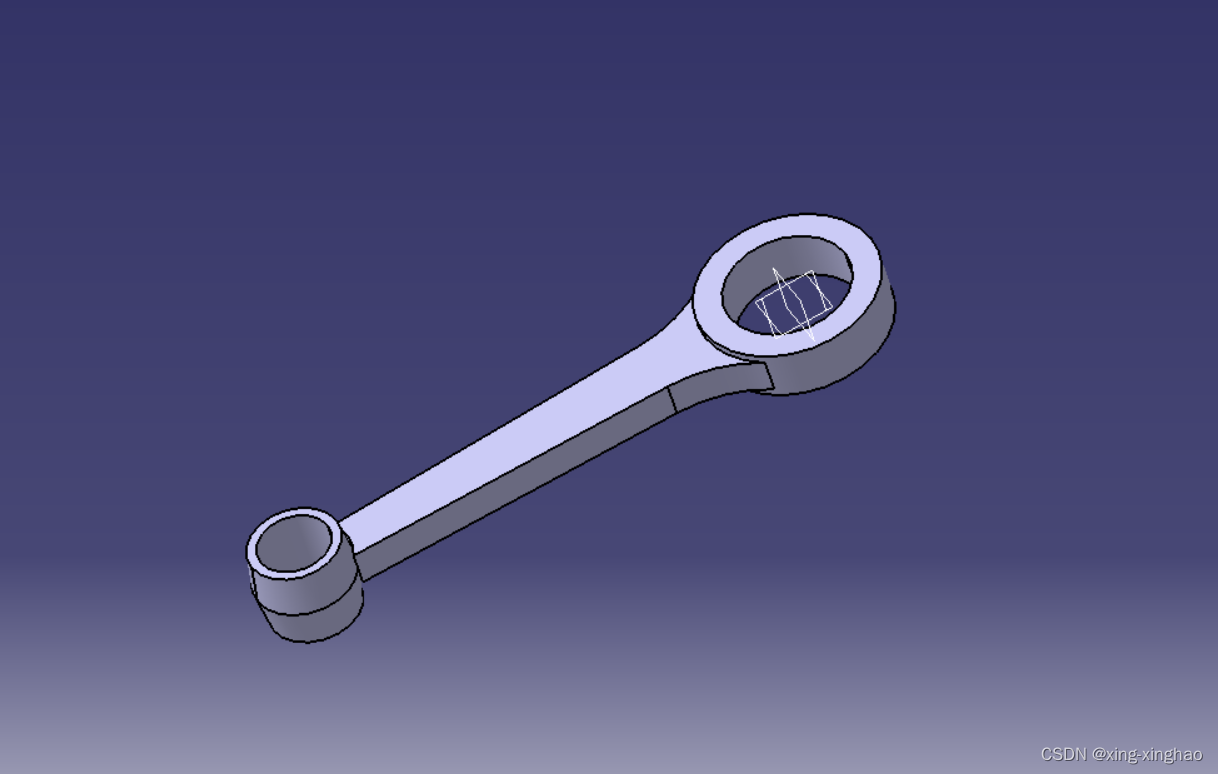
前言 本示例详细讲解使用abaqus实现连杆的形状优化的操作过程。 本页讨论 前言一、创建模型1.创建几何部件2.定义材料属性3.创建装配实体4.创建分析步5.创建相互作用6.创建边界条件及载荷7.创建分析作业并提交分析8.可视化后处理 二、设置优化1.创建优化任务2.创建设计响应3.创建目标函数4.创建约束5.创建优化进程 三、执行优化1.监控优化进度 一、创建模型

【机器人学】串联机械臂连杆的速度及加速度推导
1. 反对称矩阵及其性质 定义一个( n n n× n n n)的矩阵 S \textbf{S} S,如果满足 S + S T = O \textbf{S}+\textbf{S}^T=\textbf{O} S+ST=O,则矩阵 S \textbf{S} S被称为反对称矩阵。 对于三维向量 a = ( a x , a y , a z ) T \textbf{a}=(a_x, a_y,a_z)^T
偏心轮连杆简易八足的制作分享
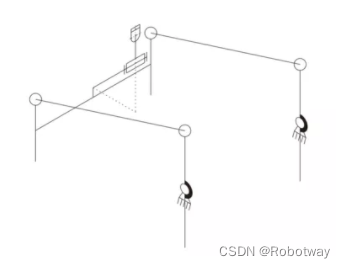
1. 运动功能说明 简易八足机器人可以通过两侧仿生机构的差速运动来实现前进、后退、原地转向、弧形转向等基本行走功能。 2.结构说明 该样机其实是由两个偏心轮连杆简易四足并排组合构成的,在每条腿上安装了两个装饰性的活动连杆,让它的外观更像蜘蛛或螃蟹。 3. 运动功能实现 偏心轮连杆简易八足机构的运动方式是差速运动,与小型双轮差速
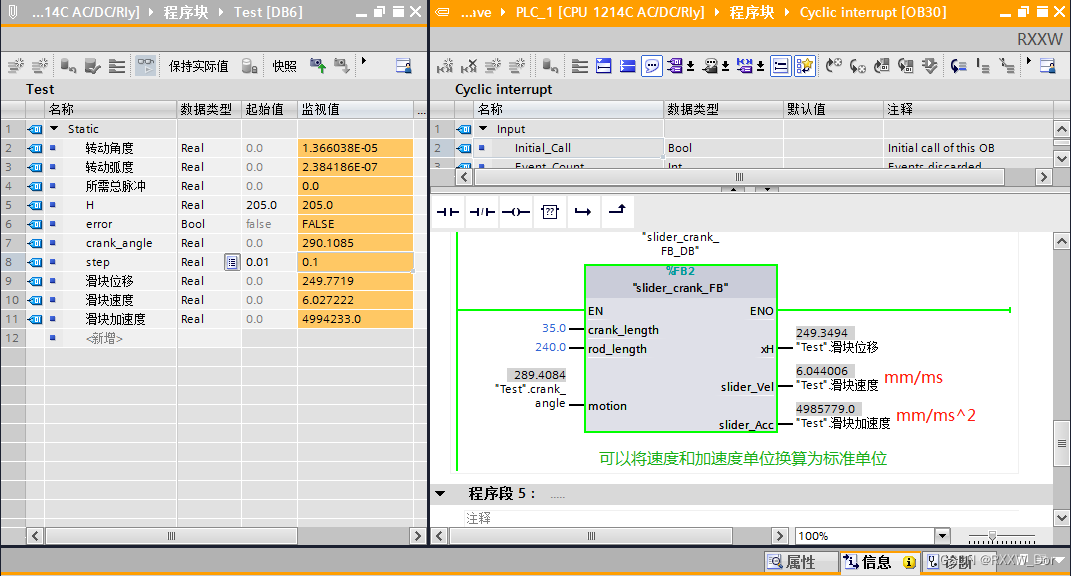
滑块连杆模型仿真(三菱ST+博途SCL计算源代码)
由滑块位置逆计算曲柄角度,请参看下面的文章链接。这篇博客主要计算由曲柄转动角度计算滑块位置。 https://blog.csdn.net/m0_46143730/article/details/128943228https://blog.csdn.net/m0_46143730/article/details/128943228简单的看下连杆滑块模型 模型的数学推导过程,大家可以参看上面的
![机器人研究方向的自我学习[3] 操作臂运动学 连杆变换的推导](https://img-blog.csdnimg.cn/20210315153401634.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dlaXhpbl80NDg5Nzc3Ng==,size_16,color_FFFFFF,t_70)
机器人研究方向的自我学习[3] 操作臂运动学 连杆变换的推导
操作臂运动学 1、连杆参数 (1)三维空间中的任意两个轴之间的距离均为一个确定值,两个轴之间的距离即为两轴之间的公共垂线的长度。上图中关节轴i-1和关节轴i之间的公垂线的长度为a i-1(下标),即为连杆长度。 (2)α i-1(下标)表示关节轴i-1和关节轴i之间的连杆扭转角。 (3)沿两个相邻连杆共轴线方向的距离可以用一个参数描述,称为连杆偏距。在关节轴i上的连杆偏距记为di。另一个参数
制作一个空间连杆四足【内附资料下载链接】
1. 运动功能说明 空间连杆四足的主要结构是一套欠驱动的空间连杆组,可以被动适应不平整的地面。它只包含一个舵机,通过舵机的摆动可以实现向前爬行。 2. 结构说明 仅仅使用了一个电机,采取欠驱动设计方案,因此其四肢有一定的松散空间,遇到地面不平可以自动适应。欠驱动的设计思路一方面保证了它的自适应性,另一方面减少了冗余的电机,使其更加节能。在连杆组的作用下,
机器人连杆惯量参数辨识(估计)
杆的转动惯量的计算公式是I=mr^2。在经典力学中,转动惯量(又称质量惯性矩,简称惯矩)通常以I 或J表示,SI 单位为 kg·m²。对于一个质点,I = mr²,其中 m 是其质量,r 是质点和转轴的垂直距离。 力矩等于转动惯量乘以角加速度即M=J*a。J是转动惯量,a是角加速度,M是力矩,也称为转矩或扭矩。转动惯量乘以角加速度:转动惯量相当于惯性质量,是保持物体不转动的能力,力矩相当于力,是
基于Matlab模拟四连杆机器人
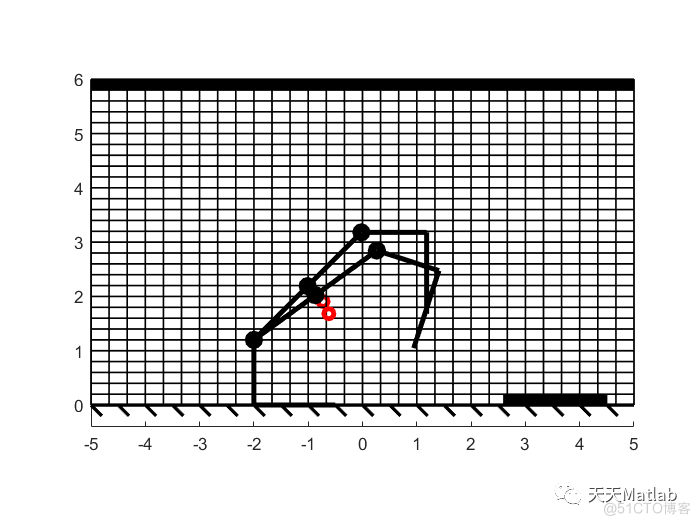
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。 🍎个人主页:Matlab科研工作室 🍊个人信条:格物致知。 ⛄ 内容介绍 4 连杆机器人的运动学模拟器,演示: - 机器人的硬编码行走。 - 反向运动学控制。 - 通过 Arduino 与物理机器人交互进行卡尔曼滤波 - Q-Learning,从一个位置移动到另一个位置,同时保持稳定并
3. SimMechanics/Multibody二连杆平面臂仿真
目录 1. 引言 2. 搭建仿真模型 3. 仿真结果 4. 总结 1. 引言 前面两篇文章分别介绍了Multibody的基本使用方法以及模型驱动和信号测量的基础。接下来我们就可以搭建一些典型机构的仿真模型了。这篇文章主要介绍利用Multibody搭建二连杆平面臂的仿真模型。利用Multibody可以非常方便地实现机器人运动学及动力学相关验证工作。 2. 搭建仿