本文主要是介绍机器人研究方向的自我学习[3] 操作臂运动学 连杆变换的推导,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
操作臂运动学
1、连杆参数

(1)三维空间中的任意两个轴之间的距离均为一个确定值,两个轴之间的距离即为两轴之间的公共垂线的长度。上图中关节轴i-1和关节轴i之间的公垂线的长度为a i-1(下标),即为连杆长度。
(2)α i-1(下标)表示关节轴i-1和关节轴i之间的连杆扭转角。
(3)沿两个相邻连杆共轴线方向的距离可以用一个参数描述,称为连杆偏距。在关节轴i上的连杆偏距记为di。另一个参数描述两相邻连杆绕公共轴线旋转的夹角,该参数称为关节角,记为θi。
因此机器人的每个连杆都可以用4个运动参数来描述。对于转动关节,θi为关节变量,其他三个参数固定不变;对于移动关节,di为关节变量,其他三个参数固定不变。
2、连杆坐标系的建立

连杆参数在连杆坐标系中的表示方法。

3、操作臂运动学
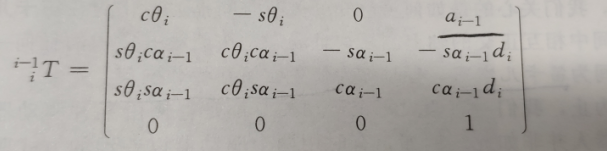
连杆变换的推导
我们希望建立坐标系{i}相对于坐标系{i-1}的变换,这个变换是只有一个变量的函数,另外三个参数由机械系统确定,得到:
4、Matlab练习


a、b:

c:
clc
clear alla=input("输入欧拉角a:");%a-θ1,b-θ2,c-θ3
b=input("输入欧拉角b:");
c=input("输入欧拉角c:");A=[cosd(a) -sind(a) 0 0;sind(a) cosd(a) 0 0;0 0 1 0;0 0 0 1;]%0-1T
B=[cosd(b) -sind(b) 0 4;sind(b) cosd(b) 0 0;0 0 1 0;0 0 0 1;]%1-2T,L1=4
C=[cosd(c) -sind(c) 0 3;sind(c) cosd(c) 0 0;0 0 1 0;0 0 0 1;]%2-3T,L2=3T=A*B*C;%0-3T运行结果:
输入欧拉角a:10
输入欧拉角b:20
输入欧拉角c:30A =0.9848 -0.1736 0 00.1736 0.9848 0 00 0 1.0000 00 0 0 1.0000B =0.9397 -0.3420 0 4.00000.3420 0.9397 0 00 0 1.0000 00 0 0 1.0000C =0.8660 -0.5000 0 3.00000.5000 0.8660 0 00 0 1.0000 00 0 0 1.0000T =0.5000 -0.8660 0 6.53730.8660 0.5000 0 2.19460 0 1.0000 00 0 0 1.0000输入欧拉角a:90
输入欧拉角b:90
输入欧拉角c:90A =0 -1 0 01 0 0 00 0 1 00 0 0 1B =0 -1 0 41 0 0 00 0 1 00 0 0 1C =0 -1 0 31 0 0 00 0 1 00 0 0 1T =0 1 0 -3-1 0 0 40 0 1 00 0 0 1d:
link()函数:
L = Link() 创建一个带默认参数的连杆
(2)L = Link(L1)复制连杆L1
(3)L = Link(OPTIONS) 创建一个指定运动学、动力学参数的连杆。
OPTIONS:
l.alpha = 0; %杆件长度
l.A = 0; %杆件转角
l.theta = 0; %杆件关节变量
l.D = 0; %相邻杆件偏距
l.sigma = 0; %关节类型 0为旋转 1为平移
l.mdh = 0; %D-H方法类型 0为标准 1为非标准
l.offset = 0; %关节变量偏移
l.qlim = []; %返回关节变量的上下限 [min max]
% it’s a legacy DYN matrix
l.m = []; %杆件质量
l.r = []; %返回3×1的关节齿轮向量
v = [];
l.I = []; %返回一个3×3 对称惯性矩阵
l.Jm = []; %返回电机惯性
l.G = []; %返回齿轮的传动比
l.B = 0; %返回粘性摩擦
l.Tc = [0 0]; %返回库仑摩擦
fkine()函数:
fkine是Robotic toolbox求解正运动的函数,具体是利用MDH方式求解变化矩阵还是DH求解变化矩阵主要看和机械臂定义的类型
参考网址:
https://blog.csdn.net/qq_35551200/article/details/97030782?ops_request_misc=&request_id=&biz_id=102&utm_term=%20link()%E5%87%BD%E6%95%B0&utm_medium=distribute.pc_search_result.none-task-blog-2allsobaiduweb~default-2-97030782.nonecase
robot()函数:
参考网址:
https://blog.csdn.net/qq_27838307/article/details/80715064?ops_request_misc=&request_id=&biz_id=102&utm_term=robot()%E5%87%BD%E6%95%B0%E7%BB%98%E5%88%B6%E6%9C%BA%E5%99%A8%E4%BA%BA&utm_medium=distribute.pc_search_result.none-task-blog-2allsobaiduweb~default-0-80715064.pc_search_result_no_baidu_js
在MATLAB 2019 或者 2020 等高版本里,使用机器人工具箱(robotics toolbox/RTB)对机器人进行可视化时(比如robot.teach,robot.plot)会报错:
参考网址:https://blog.csdn.net/WanZhiQiu_ac/article/details/110234543
clear
clc % di a i-1 αi-1]);%定义连杆
L(1)= Link('d', 0, 'a', 0, 'alpha', 0);
L(2)= Link('d', 0, 'a', 4, 'alpha', 0);
L(3)= Link('d', 0, 'a', 3, 'alpha', 0);b=isrevolute(L(1)); %Link 类函数
b1=isrevolute(L(2));
b2=isrevolute(L(3));robot=SerialLink([L(1),L(2),L(3)],'name','t'); %SerialLink 类函数 %连接连杆
robot.name='三连杆平面机械臂';
robot.comment='三连机械臂';
robot.display()
robforward_kinematics=robot.fkine([pi/2,pi/2,pi/2])%正运动学view(3);
theta = [pi/2,pi/2,pi/2];
W = [-2 2 -2 2 -2 2];
robot.plot(theta,'workspace', W , 'tilesize',1); %SerialLink 类函数运行结果:
robot = 三连杆平面机械臂:: 3 axis, RRR, stdDH, slowRNE - 三连机械臂;
+---+-----------+-----------+-----------+-----------+-----------+
| j | theta | d | a | alpha | offset |
+---+-----------+-----------+-----------+-----------+-----------+
| 1| q1| 0| 0| 0| 0|
| 2| q2| 0| 4| 0| 0|
| 3| q3| 0| 3| 0| 0|
+---+-----------+-----------+-----------+-----------+-----------+robforward_kinematics = 0 1 0 -4-1 0 0 -30 0 1 00 0 0 1
>>

这篇关于机器人研究方向的自我学习[3] 操作臂运动学 连杆变换的推导的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







