本文主要是介绍偏心轮连杆简易八足的制作分享,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1. 运动功能说明
简易八足机器人可以通过两侧仿生机构的差速运动来实现前进、后退、原地转向、弧形转向等基本行走功能。

2.结构说明
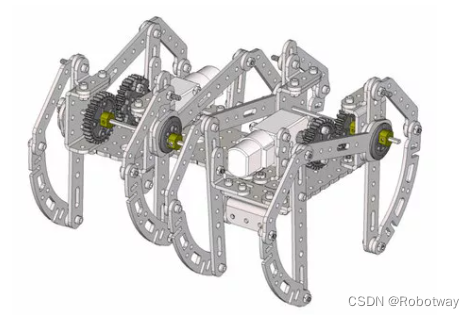
该样机其实是由两个偏心轮连杆简易四足并排组合构成的,在每条腿上安装了两个装饰性的活动连杆,让它的外观更像蜘蛛或螃蟹。

3. 运动功能实现
偏心轮连杆简易八足机构的运动方式是差速运动,与小型双轮差速底盘一样,请参考小型双轮差速底盘一文。
4.扩展样机
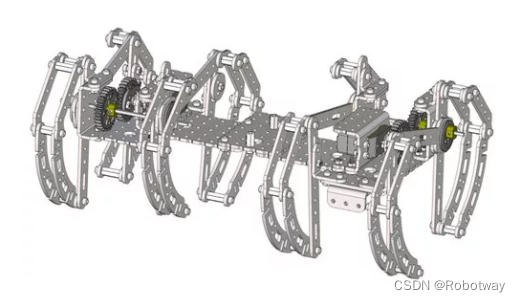
本样机有一些扩展案例,基本是使用不同构型的偏心轮连杆简易四足机构,如取消传动轴,将两侧的把偏心轮都直接连接在电机的输出轴上,或更换电机等,如下图所示:

还可以使用纸黏土、瓦楞纸、彩色卡纸等为它制作螃蟹或蜘蛛的外观。
5. 资料下载
资料内容:样机3D文件
详情请参考:偏心轮连杆简易八足
这篇关于偏心轮连杆简易八足的制作分享的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




