偏心轮专题
偏心轮连杆简易八足的制作分享
1. 运动功能说明 简易八足机器人可以通过两侧仿生机构的差速运动来实现前进、后退、原地转向、弧形转向等基本行走功能。 2.结构说明 该样机其实是由两个偏心轮连杆简易四足并排组合构成的,在每条腿上安装了两个装饰性的活动连杆,让它的外观更像蜘蛛或螃蟹。 3. 运动功能实现 偏心轮连杆简易八足机构的运动方式是差速运动,与小型双轮差速
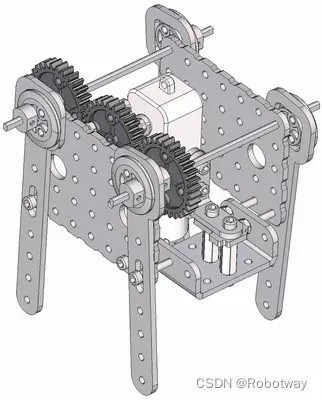
机器人制作开源方案 | 齿轮传动轴偏心轮摇杆简易四足
1. 功能描述 齿轮传动轴偏心轮摇杆简易四足机器人是一种基于齿轮传动和偏心轮摇杆原理的简易四足机器人。它的设计原理通常如下: ① 齿轮传动:通过不同大小的齿轮传动,实现机器人四条腿的运动。通常采用轮式齿轮传动或者行星齿轮传动,使得各个关节能够协同工作,完成步态运动。 ② 轴偏心轮:机器人的每条腿上安装有一个轴偏心轮摇杆装置。该装置由一个偏心轮和一个连杆组成