齐次专题

齐次变换矩阵的原理与应用
齐次变换矩阵的原理与应用 通过齐次变换矩阵,可以描述机械臂末端执行器(法兰)在三维空间中的平移和旋转操作。该矩阵结合了旋转和平移信息,用于坐标变换。 1. 齐次变换矩阵的基本形式 一个齐次变换矩阵 T是一个 4x4 矩阵,表示刚体的旋转和平移: T = [ R t 0 1 ] = [ r 11 r 12 r 13 x r 21 r 22 r 23 y r 31 r 32 r 33 z 0

线性代数 第五讲:线性方程组_齐次线性方程组_非齐次线性方程组_公共解同解方程组_详解
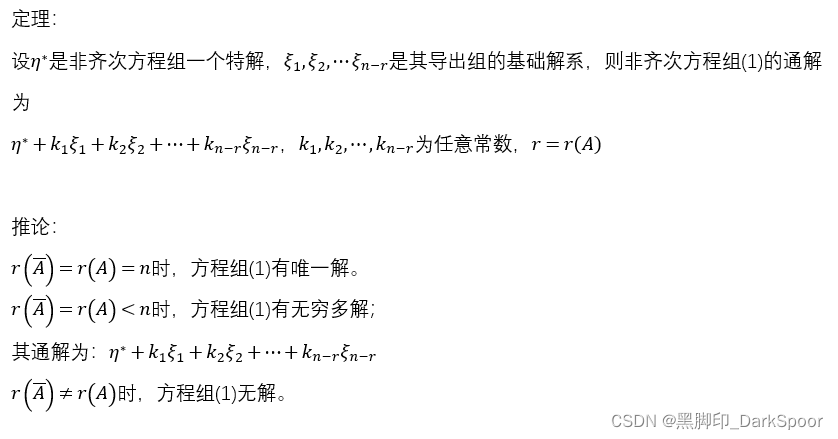
线性方程组 文章目录 线性方程组1.齐次线性方程组的求解1.1 核心要义1.2 基础解系与线性无关的解向量的个数1.3 计算使用举例 2. 非齐次线性方程的求解2.1 非齐次线性方程解的判定2.2 非齐次线性方程解的结构2.3 计算使用举例 3.公共解与同解3.1 两个方程组的公共解3.2 同解方程组 4.重难点题型总结4.1 抽象齐次线性方程组的求解4.1 含有系数的非齐次线性方程组的求

机器视觉1-1:齐次坐标系 Homogeneous Coordinates
参考Homogeneous Coordinates ,Michigan Technological University 的 Dr. C.-K. Shene写的Introduction to Computing with Geometry Tutorial之中的一部分,摘录+翻译。 引入齐次坐标系的原因之一是为了描述infinity(无穷远点)。 One of the many purpos

【自动驾驶】26.【很清晰】旋转矩阵,欧拉角,四元数,旋转向量和齐次变换矩阵
原文链接:https://blog.csdn.net/varyshare/article/details/91899049 前言 这几个名词都是用来描述一个物体的位置和姿态的。它们之间可以相互转化,而且各有各的优点与缺点。我先把这几个名词之间的联系理清楚,然后再解释他们各自适合的领域以及为何需要他们。 1.旋转矩阵 旋转矩阵的初衷就是人们希望给定一个向量x,然后我对它旋转,能直接通过矩阵乘法的

线性方程解法(齐次,非齐次)
转载地址:https://en.wikipedia.org/wiki/System_of_linear_equations#Solving_a_linear_system 由于很多地方需要求解 齐次,非齐次线性方程,把线代,高数书毕业了都扔了,汗,简单总结一下。 实际中都是用Eigen 库,调用API解线性方程组,得注意每个函数的适用条件。 where A is a
分段函数或含绝对值符号型自由项非齐次线性微分方程求解思路
分段函数或含绝对值符号型自由项非齐次线性微分方程求解思路 @(微积分) 总体思路是:分段分别求解,再根据连续性确定待定系数。 比如:求解微分方程 y″+4y=3|sinx|在[−π,π] y''+4y = 3|sinx|在[-\pi,\pi]上的通解。 分析:分别考虑。 y″+4y=−3sinx,x∈[−π,0] y''+4y = -3 sinx , x \in [-\pi,0]

一般二阶线性非齐次微分方程的解与对应齐次方程的解的关系
一般二阶线性非齐次微分方程的解与对应齐次方程的解的关系 @(微积分) 设 p(x),q(x),f(x),f(x)≠0 p(x),q(x),f(x),f(x)\neq 0为连续函数,对于下面的二阶线性非齐次方程: y″+p(x)y′+q(x)y=f(x) y''+p(x)y'+q(x)y = f(x) (1) 对应的二阶线性齐次方程: y″+p(x)y′+q(x)y=0 y''+p(x

齐次变换矩阵、欧拉角
齐次变换矩阵 因为老是忘记齐次变换矩阵的含义以及方向,每次推导公式都很费劲,写下这篇文章用于快速回顾齐次变换矩阵。 表示的是:坐标系A到坐标系B的齐次变换矩阵,也是坐标系B在坐标系A下的位姿。 对于这个矩阵,有三个物理意义: (1)坐标变换:通过变换矩阵可以获得{B}坐标系下的向量(坐标)在{A}坐标系下的描述(坐标)。(2)坐标系的描述:描述了坐标系{B}在{A}下的位姿(位置和姿态

「常系数齐次线性递推」——矩阵快速幂的优化
请参考 https://www.cnblogs.com/Troywar/p/9078013.html 「常系数齐次线性递推」——矩阵快速幂的优化 https://blog.csdn.net/corsica6/article/details/82696715 常系数齐次线性递推优化矩阵快速幂-bzoj4161-4944 https://www.luogu.org/blog/Zhang-R

14.图像透视——距离的测验,齐次坐标(Homogeneous Coordinate),透视投影(Perspective Projection),投影实战_2
目录 距离的测验 齐次坐标(Homogeneous Coordinate) 透视投影(Perspective Projection) 投影实战 学前概念 透视投影法(perspective projection method)一种投影法。所谓透视,即穿过透明体观察物体。在人与物体之间,设立一个透明的平面,称作画面(即投影面),人眼的位置称视点(即投影中心COP),由视点至物体上各个
关于齐次坐标系的笔记
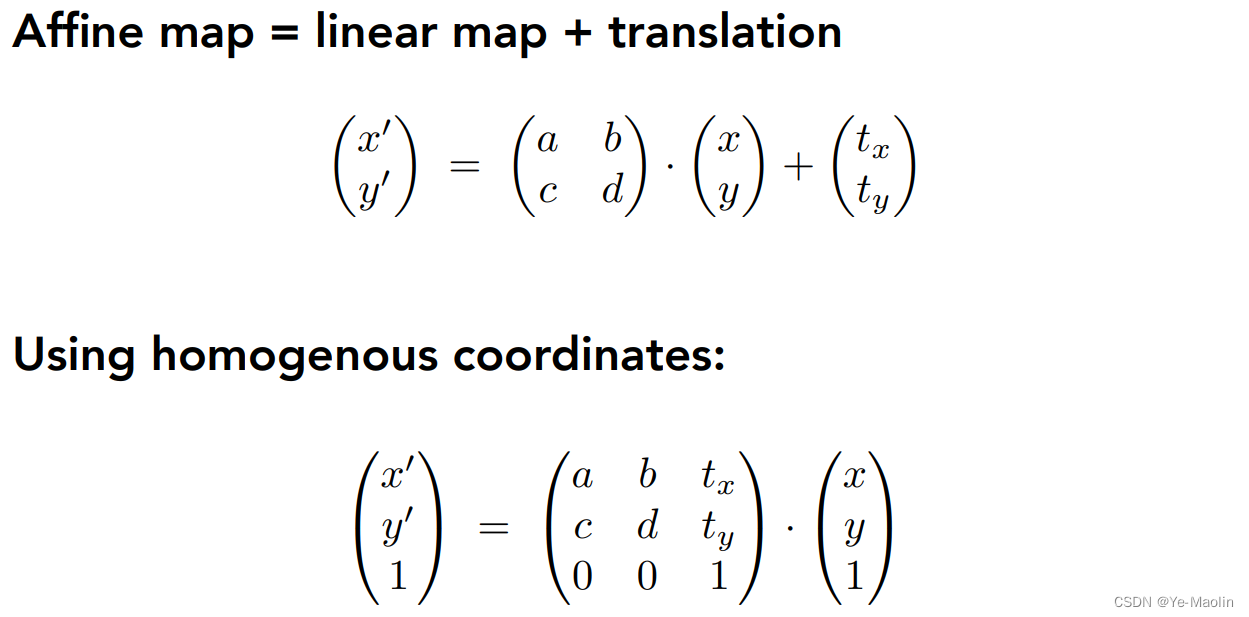
3D计算机图形学第一章 在普通的矩阵表示法中,点V的平移、缩放和旋转变换可以通过操作: V`=V+D, V` = SV, V` = RV来实现 但是为了将这三种变换用同样的方式进行处理组合,采用齐次坐标系,这个坐标系增加了空间的维数。 这样平移操作,以及其他两种操作就都可以通过矩阵乘来实现了。 齐次坐标系中, 对于笛卡尔坐标系中的顶点V(x, y, z),将被表示成V(x·w,

高等数学:非齐次线性微分方程解的结构(含例题解析)
非齐次线性微分方程解的结构 非齐次线性微分方程,是具有非齐次项的线性微分方程。其中, 一阶非齐次线性微分方程的表达式为 y'+p(x)y=Q(x)二阶常系数非齐次线性微分方程的表达式为 y''+py'+qy=f(x) 非齐次线性微分方程的通解,是由其对应的 齐次方程的通解 加上 非齐次线性微分方程的一个特解 组成。 笔记以及例题如下:
Unity中Shader 齐次坐标
文章目录 前言一、什么是齐次坐标二、齐次坐标增加分量 w 的意义1、当 w ≠ \neq = 0时:2、当 w = 0时:3、用方程组,直观的看一下w的意义 前言 在之前的文章中,我们进行了正交相机视图空间转化到裁剪空间的推导。 Unity中Shader裁剪空间推导(在Shader中实现) 在这篇文章中,我们进行透视相机视图空间转化到裁剪空间的推导的前置准备——齐次
【GAMES101】二维变换和齐次坐标
这几天都在抽空学OpenGL、敲leetcode和看games,这里留点笔记给以后复习 games101第一节课在吹水,第二节课讲了线性代数的入门知识,比较简单,这里稍微回顾一下重点,然后开始讲第三节课的二维变换和齐次坐标 目录 向量 向量的点乘 向量的叉乘 二维变换 缩放 拉伸 旋转 平移 齐次坐标 向量 games101的向量是默认列向量 向量的点乘 向

机器人学习笔记(2) 刚性运动和齐次变换
2019/10/22 2.1 位置的表示方法 几何推理的方法:合成方法、分析方法。 点在坐标系的表示: 点P在两个坐标系中表示如下,其中右上角表示的为所在坐标系。 坐标系相对坐标系的表示:第一项表示的为坐标系x1y1o1相对xyo的坐标。 2.2 旋转的表示方法 2.2.1 平面内的旋转 二维空间中,坐标系o1x1y1的各轴线(单位向量)被投影到坐标系o0x0y0(参考坐标系),旋转矩阵:

齐次定理与叠加定理(电路分析基础)
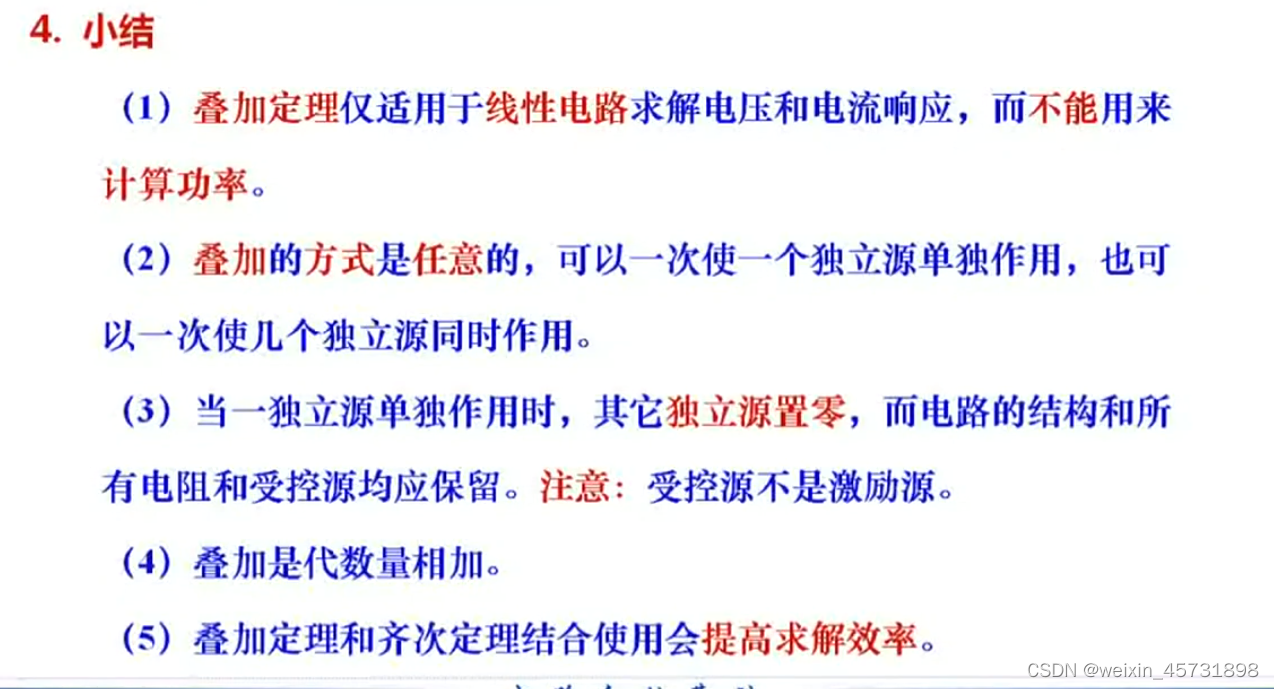
电路分析中的齐次定理与叠加定理 齐次定理叠加定理补充知识——克莱姆法则参考总结 齐次定理 齐次定理的描述如下:对于具有唯一解 的线性电路,当只有一个激励源(独立电压源或独立电流源)作用的时候,其响应(电路任意处的电压或电流)与激励成正比。 比如激励是电压源 u s u_s us ,响应是某一支路的电流 i i i ,则有 i = m ∗ u s i=m*u_s

齐次坐标 (Homogeneous Coordinate)
转载:http://www.360doc.com/content/11/0410/18/3698714_108650801.shtml(非源出处) 齐次坐标表示是计算机图形学的重要手段之一,它既能够用来明确区分向量和点,同时也更易用于进行仿射(线性)几何变换。”—— F.S. Hill, JR。 对于一个向量v以及基oabc,可以找到一组坐标(v1,v2,v3),使得v = v1 a +

线性代数(四)| 解方程 齐次性 非齐次性 扩充问题
文章目录 1 方程解的个数2 解方程步骤2.1 齐次性方程组2.2 非齐次方程组 3 一些扩充问题 系数矩阵 增广矩阵 A m × n X = B A_{m×n}X=B Am×nX=B 1 方程解的个数 m 代表有m个方程 n代表有n个未知数 系数矩阵的秩与增广矩阵的秩不同 无解 若相同 ,如系数矩阵的秩和未知数个数n相同,则有唯一解,若系数矩阵的秩小于未知数个数n
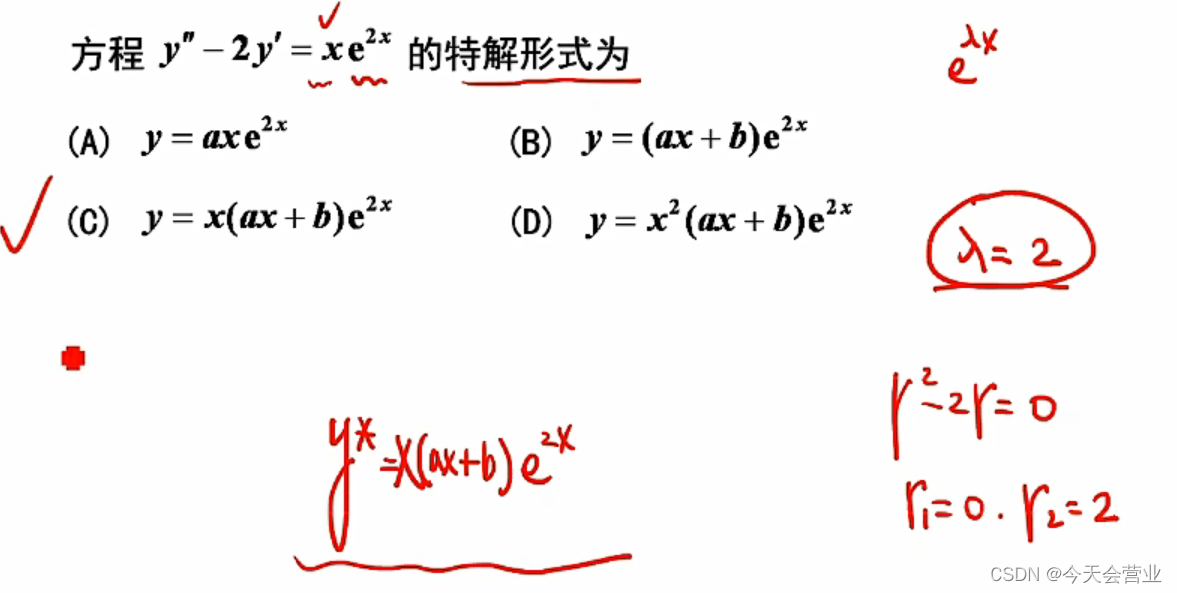
3.26每日一题(线性非齐次的特解如何设)
1、非齐次方程有e的2x次幂:特解也有e的2x次幂 2、e的2x次幂前面有特殊的一元方程:特解要设为一般的特征方程(ax+b) 3、求线性齐次特征方程的特征根; 4、判断e的 rx 次幂中的 r 和特征根有没有重合的个数:有几个重合的特征根,就需要乘x的几次幂(如:题中的特征根为:r1=0,r2=2;而e的 rx 中 r=2,说明有一重根,则特解需要乘 x 的 1 次幂)

怎样通过Python和齐次坐标变换方法实现坐标系之间的转换?
怎样通过Python和齐次坐标变换方法实现坐标系之间的转换? 1. 齐次坐标变换方法2. Python简单demo实现3. 一个点云数据转换的测试案例3.1 简单的体素可视化测试案例3.2 实现点云数据的坐标系变换3.2.1 一些用到的函数3.2.2 测试完整代码及结果 1. 齐次坐标变换方法 齐次坐标变换是一种用于实现坐标系之间变换的数学技术。它通常用于计算机图形学、计算机
怎样通过Python和齐次坐标变换方法实现坐标系之间的转换?
怎样通过Python和齐次坐标变换方法实现坐标系之间的转换? 1. 齐次坐标变换方法2. Python简单demo实现3. 一个点云数据转换的测试案例3.1 简单的体素可视化测试案例3.2 实现点云数据的坐标系变换3.2.1 一些用到的函数3.2.2 测试完整代码及结果 1. 齐次坐标变换方法 齐次坐标变换是一种用于实现坐标系之间变换的数学技术。它通常用于计算机图形学、计算机