本文主要是介绍机器人学习笔记(2) 刚性运动和齐次变换,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
2019/10/22
2.1 位置的表示方法
几何推理的方法:合成方法、分析方法。
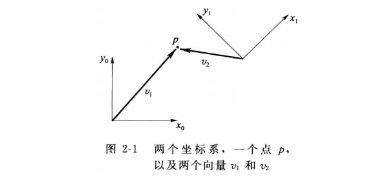
点在坐标系的表示:
点P在两个坐标系中表示如下,其中右上角表示的为所在坐标系。
坐标系相对坐标系的表示:第一项表示的为坐标系x1y1o1相对xyo的坐标。
2.2 旋转的表示方法
2.2.1 平面内的旋转
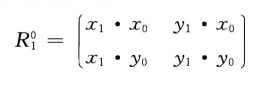
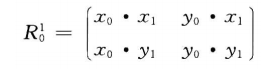
二维空间中,坐标系o1x1y1的各轴线(单位向量)被投影到坐标系o0x0y0(参考坐标系),旋转矩阵:
相反:
由于向量的点积服从交换律,因此有
2.2.2 三维空间中内旋转
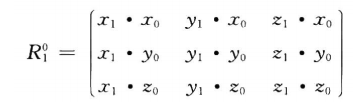
三维空间中,坐标系o1x1y1的各轴线(单位向量)被投影到坐标系o0x0y0(参考坐标系),旋转矩阵:
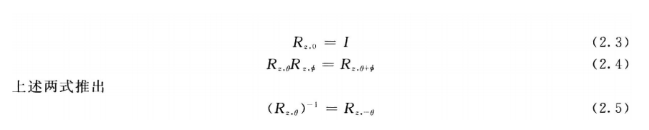
绕z轴旋转

Rz,θ具有的性质:
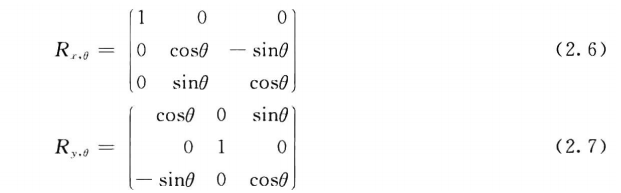
绕x轴和y轴旋转
2.3 旋转变换
在坐标系o1x1y1中p坐标表示为:
p满足:

将p投影到o0x0y0中:
联立方程:

左边的矩阵为

坐标的矩阵为o1x1y1相对o0x0y0的姿态矩阵

旋转矩阵可以用三种不同的方式解释:(具体的解释根据题意)

2019/10/23
2.3.1 相似变换
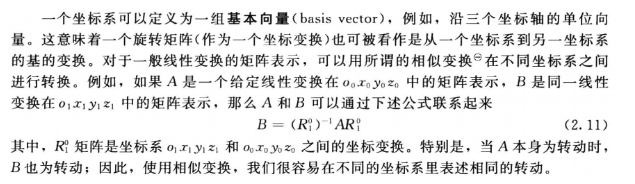
在不同坐标系中表示相同的变换
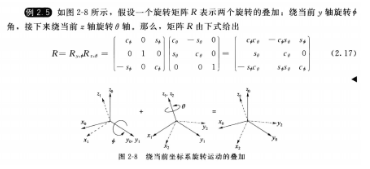
2.4 旋转的叠加
2.4.1 相对于当前坐标的旋转
旋转的叠加定律:

我们称旋转发生时围绕的那个坐标系为当前坐标系(即可能不是针对一个固定坐标系而言)。此时矩阵相乘的顺序是右乘(后乘)。
2.4.2 相对于固定的坐标系的旋转
此时矩阵相乘的顺序是左乘(前乘)。
2.4.3 旋转变换的叠加定律
即对上面叠加的总结:“当前后乘,固定左乘”
2.5 旋转的参数化

因为列向量是单位向量,各列相互正交。(1,0,0)(0,1,0)=10+01+00=0;
上面的约束一起定义了6个独立的方程,其中有9个未知数,这意味着其中的自由变量数目为3。(即想完全表达两个的坐标的系的关系需要知道三个变量)
有三种方式来表达任意旋转,任何一种方式都需要三个独立变量:欧拉角、滚动-俯仰-偏航(roll-pitch-yaw)表示法、转轴/角度表示法。
2.5.1 欧拉角
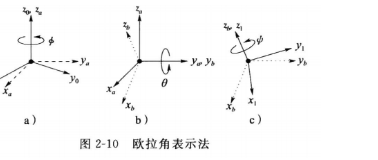
即用三个角度来表示坐标系o1x1y1z1相对于坐标系o0x0y0z0的姿态,这三角度都是相对于当前的坐标系而言,因此为后乘,用旋转矩阵表示图示变换为:
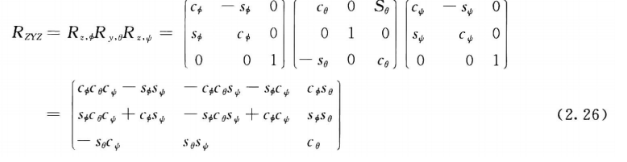
(2.26)也称ZYZ-欧拉角变换。
如何根据特定的矩阵求解角度(待补充)
2.5.2 滚动角、俯仰角和偏航角

2019/10/24
2.5.3 转轴/角度表示
利用相似变换的使得绕某轴K的旋转变换成在原有坐标系的相同的旋转。


2.6 刚性运动
定义:刚性运动是一个有序对(d,R),其中d∈R³,R∈SO(3)。所有刚性运动组成的群被称为特殊欧式群,记为SE(3)。SE(3)=R³xSO(3).

2.7 齐次变换




这篇关于机器人学习笔记(2) 刚性运动和齐次变换的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






