刚性专题

振动分析-21-从管道的刚性和柔性连接到设备的刚性和柔性支撑
刚性连接与柔性连接在管道连接方面的应用介绍。 1 管道的刚性连接 1.1 刚性连接的概念与特点 刚性连接指的是管道之间的连接点在受到外力时几乎不会发生位移或变形。刚性连接使管道各部分成为一个固定且坚固的整体,具有高强度和高稳定性,能够有效抵抗外力的作用。 刚性连接的特点可以总结为:高强度、高精度、不可移动、耐久性强四点。 1.2 刚性连接的常见类型 1.2.1 焊接连接 通过加热管道


SJ709-II安全帽下颏带强度、侧向刚性测试仪
一、主要用途 专用于检测安全帽下颏带的强度、侧向刚性的试验 二、仪器特征 1、符合标准的1#头模,带有稳定支撑,与模拟人造下颏组合使用。 2、头模连接高精度专用压力传感器。 3、触摸屏人机界面HMI,彩色液晶屏,操作方便,直观。 4、上下限位报警提示,达到上下限位自动声音报警提示。 5、配置标准要求的专用头模、人造下颏、金属测试平板 6、蜗轮蜗杆升降系统,保证升降始终垂直及水平。

rigid_trans_object_model_3d----------对3D对象模型应用刚性3D转换
Description rigid_trans_object_model_3d对3D对象模型应用刚性3D变换,即旋转和平移,并返回转换后的3D对象模型的句柄。转换由Pose中给出的姿态来描述,形式如下,其中mcsi表示输入对象模型的坐标系,cst表示转换后模型的坐标系,例如,场景的坐标系(请参见转换/姿态和“解决方案指南III-C - 3D视觉”)。姿态可以使用create_pose、pose_


图像变换:刚性变换(等距变换、欧式变换)、相似变换、仿射变换、射影变换(透视变换、投影变换)
刚性变换(等距变换、欧式变换)、相似变换、仿射变换、射影变换(透视变换、投影变换) 1.刚性变换:只对物体进行 平移 和 旋转,而形状不变 2.相似变换:等距变换 + 均匀缩放,类似相似三角形,比例不变 3.仿射变换:旋转+平移+缩放+切变shear,保持平行性 4.透视变换:旋转+平移+缩放+切变+射影 在三维空间上进行变换: 不保留平行性 射影变换的不变量是:
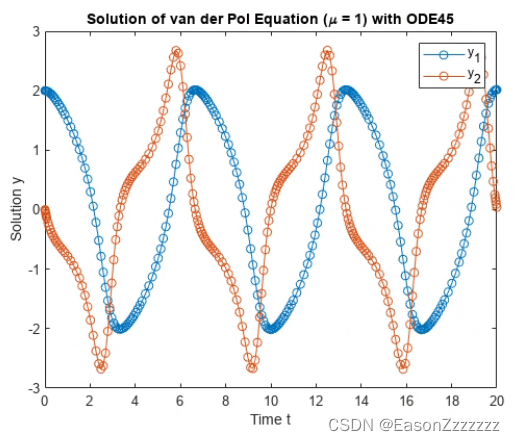
Matlab 求解非刚性微分方程(ode45)
语法 1、[t,y] = ode45(odefun,tspan,y0)2、[t,y] = ode45(odefun,tspan,y0,options)3、[t,y,te,ye,ie] = ode45(odefun,tspan,y0,options)4、sol = ode45(___) 描述 [t,y] = ode45(odefun,tspan,y0)其中,tspan = [t0 t
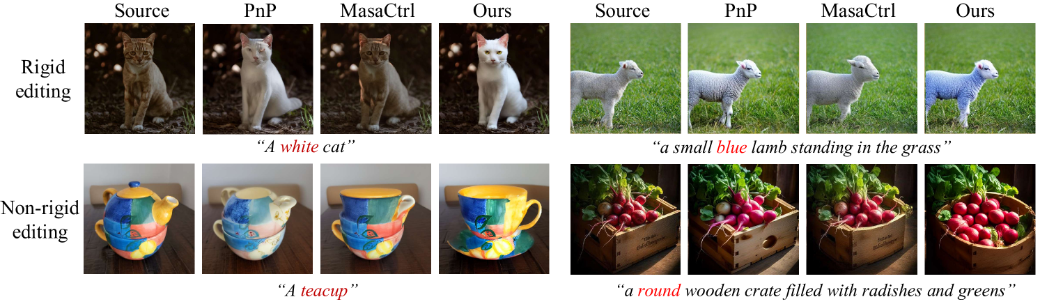
LLM增强LLM;通过预测上下文来提高文生图质量;Spikformer V2;同时执行刚性和非刚性编辑的通用图像编辑框架
文章首发于公众号:机器感知 LLM增强LLM;通过预测上下文来提高文生图质量;Spikformer V2;同时执行刚性和非刚性编辑的通用图像编辑框架 LLM Augmented LLMs: Expanding Capabilities through Composition 本文研究了如何高效地组合现有的基础模型以实现新功能的问题,文章提出了CALM(Composition to A

机械臂快速接触刚性环境阻抗对相互作用力的影响
当机械臂快速接触刚性环境时,阻抗对相互作用力的影响尤为显著。由于刚性环境对机械臂产生的阻力,机械臂在接触时会受到一个与运动方向相反的作用力,即接触力。阻抗参数的设置对接触力的大小具有重要影响。 一方面,阻尼参数决定了系统吸收能量的能力。在快速接触过程中,阻尼较大的机械臂能够吸收更多的碰撞能量,从而减小对刚性环境的冲击力。适当的阻尼设置有助于减小接触力,提高系统的稳定性和安全性。 另一方面,刚度
快速碰撞刚性环境的机器人低阻抗控制(阻尼影响分析)
问题描述 在快速碰撞刚性环境的机器人低阻抗控制中,需要通过精确的碰撞检测和处理,以及低阻抗控制策略的优化,来减少碰撞对机器人和环境的影响。同时,我们还需要适应刚性环境,提高机器人的稳定性和鲁棒性,以满足实时性的要求。 推荐一篇感觉还不错的阻抗控制相关知乎文章: 看完这篇文章,没有人比你更懂机械臂柔顺控制 - 知乎一提到柔顺控制技术,即便不是做机械臂控制的专业人员,也能想到一些名词:力传感器、
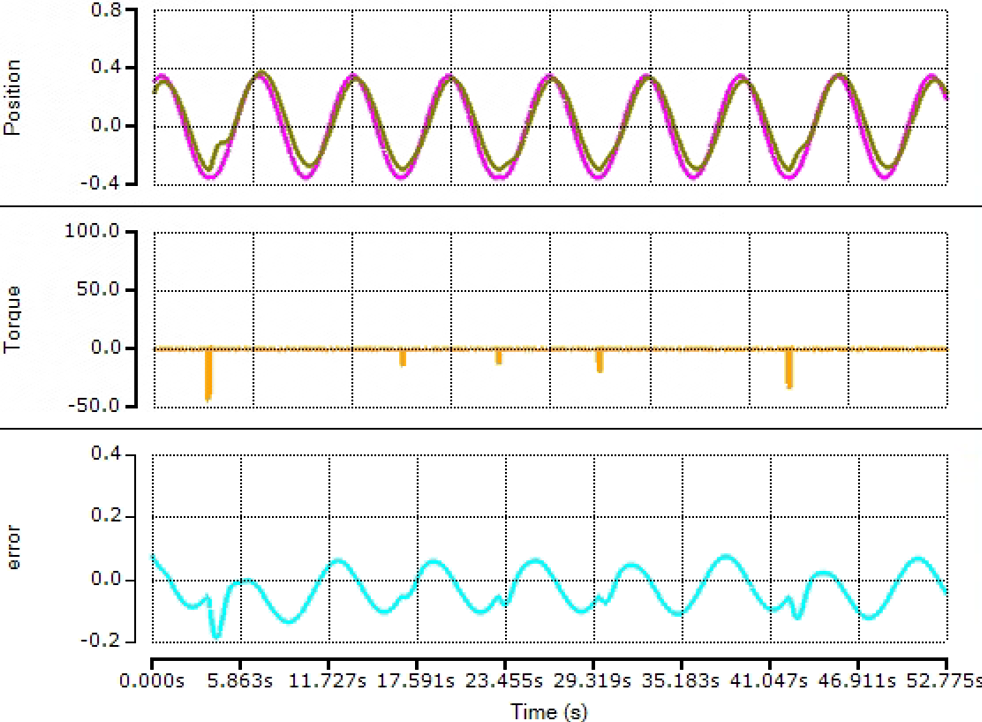
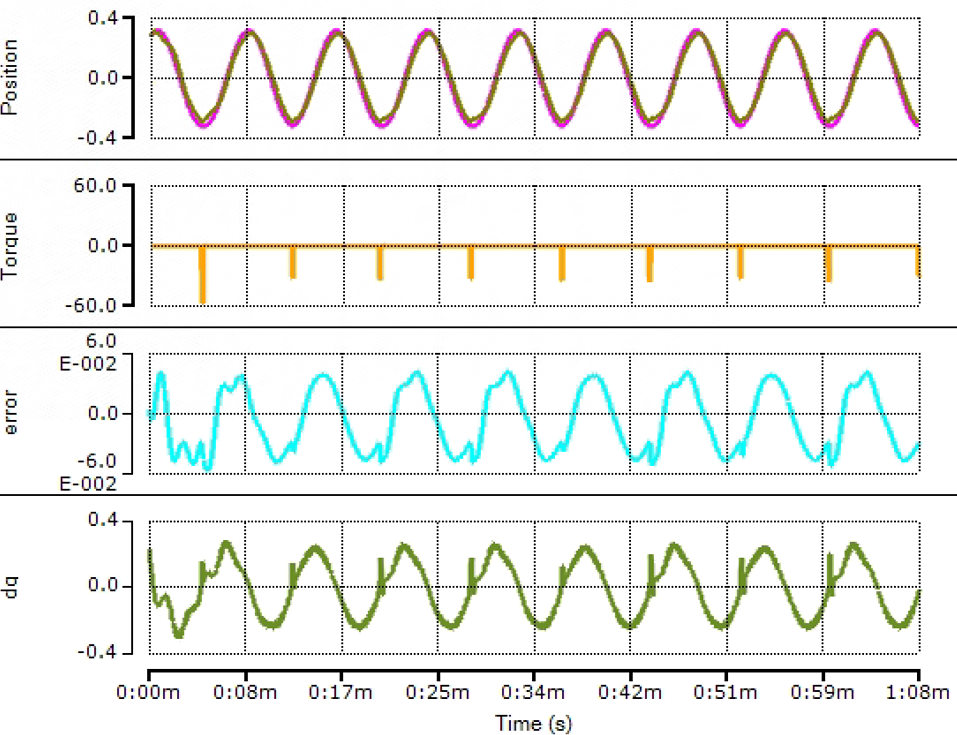
接触刚性环境任务下的机器人力控(阻抗)性能测试
内涵 接触刚性环境任务下的机器人力控(阻抗)性能测试旨在评估机器人在与刚性物体交互时的性能表现。这种测试通过调整机器人的控制参数,如期望刚度和期望阻尼等,并分析记录的数据,旨在确保机器人能够在执行任务时保持良好的稳定性和适应性。这种测试不仅评估机器人在接触刚性物体时的控制精度和适应能力,还验证机器人在面对不同形状、尺寸和物理特性物体的鲁棒性,以及在突然外部干扰下的稳定性。通过这种测试,可以进一步
机器人刚性碰撞任务的阻抗控制性能
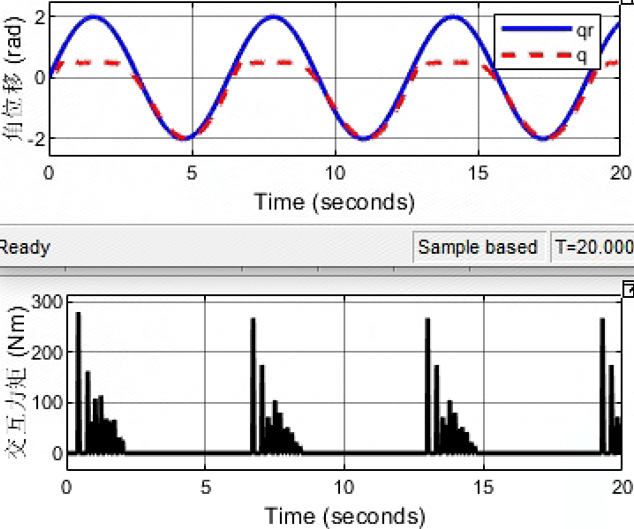
问题描述 对于机器人刚性碰撞任务,阻抗控制可以有效地提高机器人的适应性和稳定性。 在刚性碰撞任务中,机器人在接触外部物体时需要快速适应并调整自身的运动轨迹和速度,以实现精确的操控和稳定的交互。阻抗控制可以通过调整机器人的阻抗参数,改变机器人对外部力的响应特性和适应能力,从而更好地应对刚性碰撞任务中的各种挑战。 在装配线中,机器人需要准确地操控和组装各种零部件,包括不同形状、大小和材质的物体。
机器人纯阻抗控制接触刚性环境
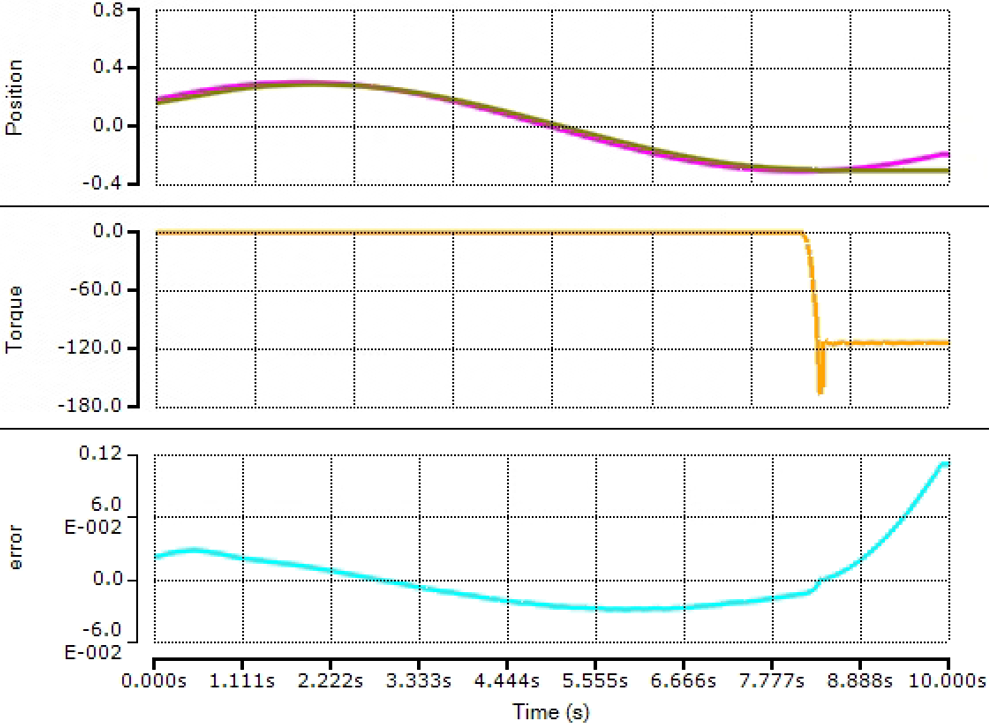
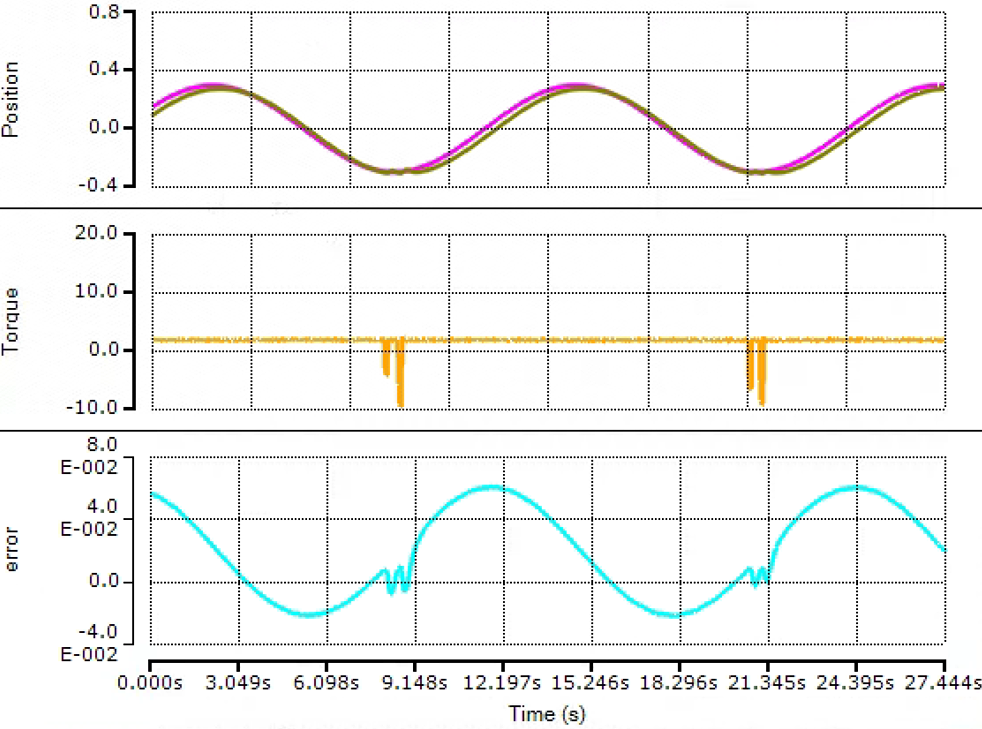
问题描述 在机器人学中,阻抗控制是一种常用的控制策略,用于管理机器人在与环境交互时的运动和力。阻抗控制背后的关键概念是将环境视为导纳,而将机器人视为阻抗。 纯阻抗控制接触刚性环境时,机器人的行为方式主要受其阻抗参数的影响。这些参数包括质量(Md)、阻尼(Bd)和刚度(Kd)。 质量(Md):影响机器人对环境产生冲击运动的大小。Md较大时,会对环境产生较大的冲击,可能导致轨迹误差较大和系统响应
matlab非刚性配准,基于图像特征和Demons的非刚性图像配准方法与流程
本发明属于图像处理领域,具体涉及一种基于图像特征和Demons的非刚性图像配准方法。 背景技术: 图像配准技术是将不同获取时间(Time)、不同传感器(Sensor)、不同获取条件(Condition)的同一场景(Scene)或同一目标(Object)的两幅或者多幅图像进行匹配的过程,被广泛应用于医学图像处理,遥感图像处理等方面。在医学图像的配准中,需要配准的两幅图像之间通常会发生较大的非均匀
阻抗控制下机器人接触刚性环境振荡不稳定进行阻抗调节
在阻抗控制下,当机器人接触刚性环境时,可能会出现振荡不稳定的情况。这可以通过调整机器人的阻抗参数来进行调节。 阻抗接触 阻抗参数中的质量、阻尼和刚度都会对机器人控制系统的性能和稳定性产生重要影响。质量主要影响系统的惯性,从而影响响应速度和稳定性;阻尼则可以抑制系统的振荡,提高系统的稳定性;而刚度则表示系统抵抗变形的能力,过大的刚度可能导致系统不稳定。在设计和调整控制

机器人学习笔记(2) 刚性运动和齐次变换
2019/10/22 2.1 位置的表示方法 几何推理的方法:合成方法、分析方法。 点在坐标系的表示: 点P在两个坐标系中表示如下,其中右上角表示的为所在坐标系。 坐标系相对坐标系的表示:第一项表示的为坐标系x1y1o1相对xyo的坐标。 2.2 旋转的表示方法 2.2.1 平面内的旋转 二维空间中,坐标系o1x1y1的各轴线(单位向量)被投影到坐标系o0x0y0(参考坐标系),旋转矩阵:
敲黑板:分布式架构,刚性事务-2PC必须注意的问题!+3PC详细解说!
2PC必须注意的问题 咱们上文介绍了分布式事务的常见方案、类型划分、2PC的起源和流程。但是不幸的是2PC还是存在几个问题: 1、全流程的同步阻塞:不管是第一阶段还是第二阶段,所有参与节点都是事务阻塞型。当参与者占有公共资源时,其他第三方访问公共资源可能不得不处于阻塞状态。 2、TM单点故障:由于全流程依赖TM的协调,一旦TM发生故障。参与者会一直阻塞下去。尤其在第二阶段,TM发生故障,

航天飞行器:热防护系统低密度刚性隔热瓦高温导热系数测量
摘要:针对空间飞行器热防护系统低密度刚性隔热瓦首先采用了瞬态平面热源法进行了常温常压下的导热系数测量,同时瞬态平面热源法也采用美国NIST标准参考试样SRM 1453进行了测量准确性的考核和验证。然后采用上海依阳实业有限公司的型号TC-HFM-1000高温热流计法导热系数测试系统对低密度刚性隔热瓦进行了试样热面温度达到1000℃、冷面温度不超过50℃的大温差条件下的导热系数测量,得到了一条完整的

java小径车碗组_Intend 世界最轻83g全山地把立、超高刚性碗组
Intend是德国弗莱堡的小品牌,大部分零部件品牌起步时产品都很少,但Intend从一开始就不是这样,他们有自己的倒冲前叉,还有独特的把立、提升刚性的碗组。现在他们又在研发曲柄和刹车碟了,所有产品都在德国设计。 这篇测评文章中,我们关注的是两件产品:Grace EN 35mm把立和Stiffmaster碗组。把立外观就像是件艺术品,碗组则很有工业气息,体型庞大,他们承诺两件产品能为车头部件提升