本文主要是介绍阻抗控制下机器人接触刚性环境振荡不稳定进行阻抗调节,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
在阻抗控制下,当机器人接触刚性环境时,可能会出现振荡不稳定的情况。这可以通过调整机器人的阻抗参数来进行调节。
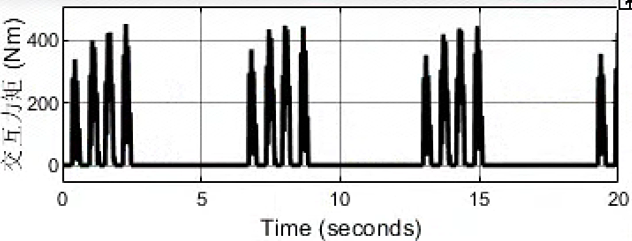
阻抗接触
阻抗参数中的质量、阻尼和刚度都会对机器人控制系统的性能和稳定性产生重要影响。质量主要影响系统的惯性,从而影响响应速度和稳定性;阻尼则可以抑制系统的振荡,提高系统的稳定性;而刚度则表示系统抵抗变形的能力,过大的刚度可能导致系统不稳定。在设计和调整控制系统时,需要考虑这些参数的影响,并根据实际需求进行合理的选择和调整。
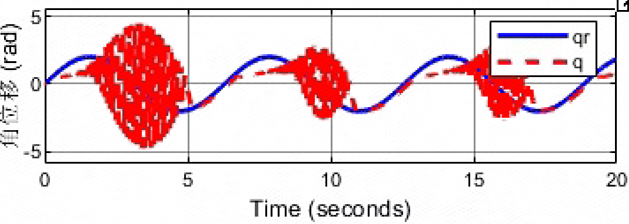
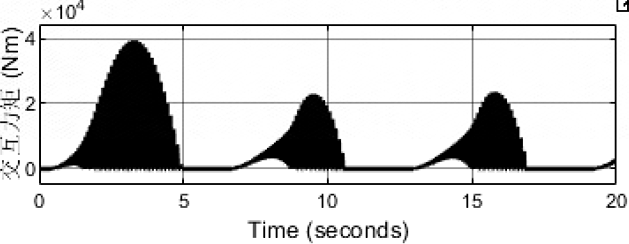
在阻抗控制模式下,机器人接触刚性环境时会引起接触振荡,主要原因可以从阻抗参数的角度进行分析。首先,阻抗控制是一种基于系统动态特性的控制方法,通过调整系统的阻抗参数,实现对机器人与环境之间交互的精确控制。在接触刚性环境时,机器人会受到来自环境的反作用力,这种反作用力可能会引起机器人的振动。
- 当阻尼参数较小时:机器人对外界力的响应比较缓慢,系统呈现出欠阻尼状态。此时,如果机器人受到来自环境的反作用力,由于阻尼较小,机器人无法迅速消耗这种能量,导致振荡的出现。
- 当阻尼参数较大时:机器人对外界力的响应比较迅速,系统呈现出过阻尼状态。此时,虽然机器人能够迅速响应外界力,但由于阻尼较大,机器人对外界力的响应比较敏感,容易受到微小扰动的影响,也可能会出现振荡。
- 当刚度参数较小时:机器人的刚度较低,对外界力的抵抗能力较弱。在接触刚性环境时,机器人可能会发生较大的变形,这种变形可能引起机器人的振动。
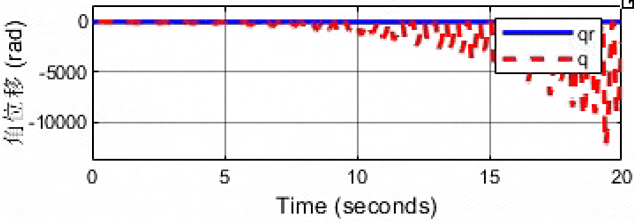
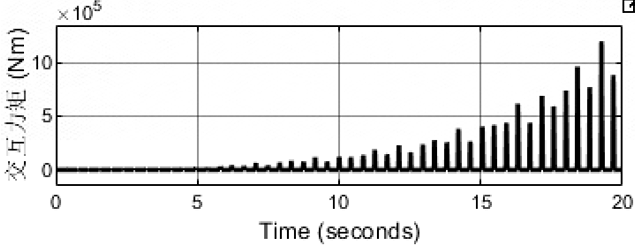
- 当刚度参数较大时:机器人的刚度较高,对外界力的抵抗能力较强。在接触刚性环境时,机器人虽然不会发生较大的变形,但由于刚度较大,机器人对外界力的响应可能过于敏感,也可能会出现振荡。
虽然这种振荡可能会对机器人的性能产生不利影响,但并不一定意味着机器人是不稳定的。在阻抗控制中,通常会使用一些稳定性判据来评估机器人的稳定性,如李雅普诺夫稳定性判据等。如果机器人在受到扰动后能够恢复稳定状态,那么这种振荡就不算是真正的不稳定性行为。
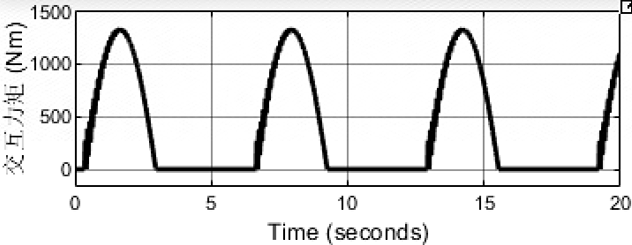
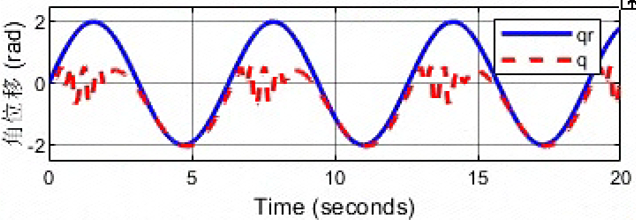
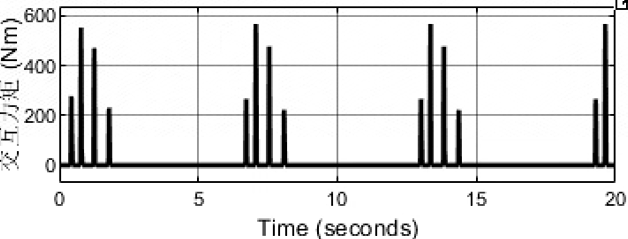
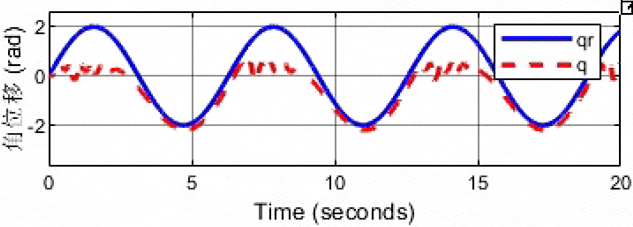
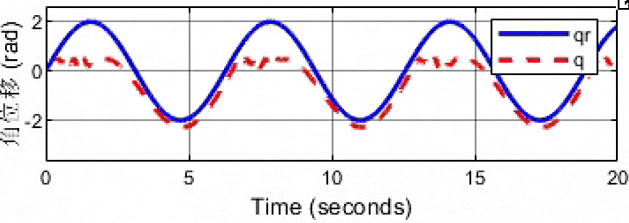
刚性环境为ke=10000
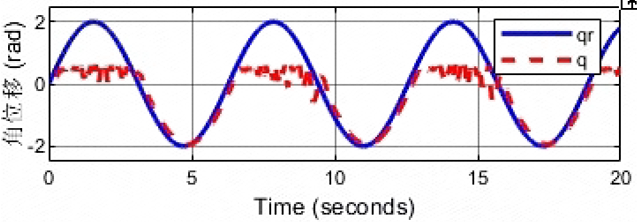
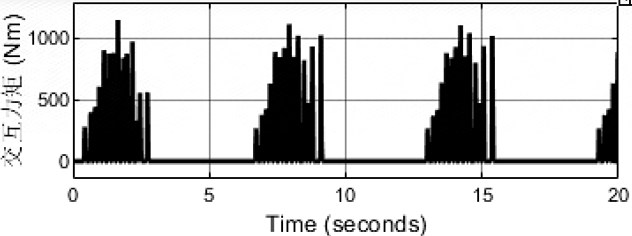
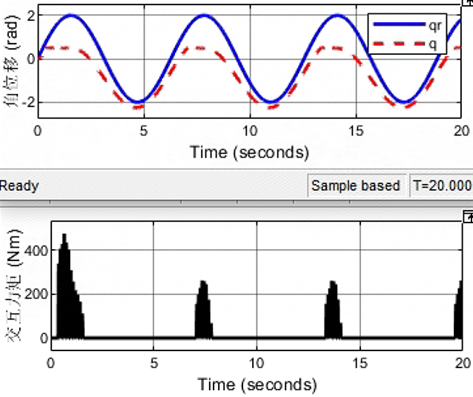
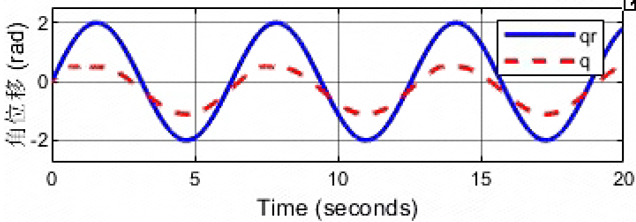
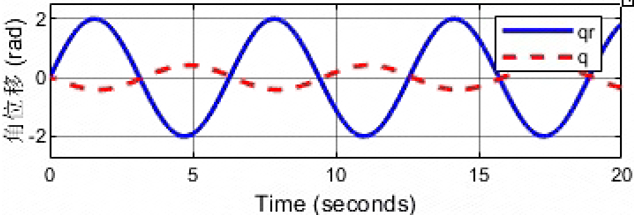
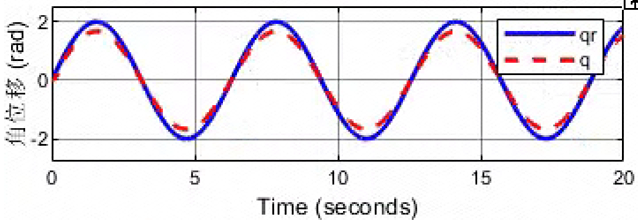
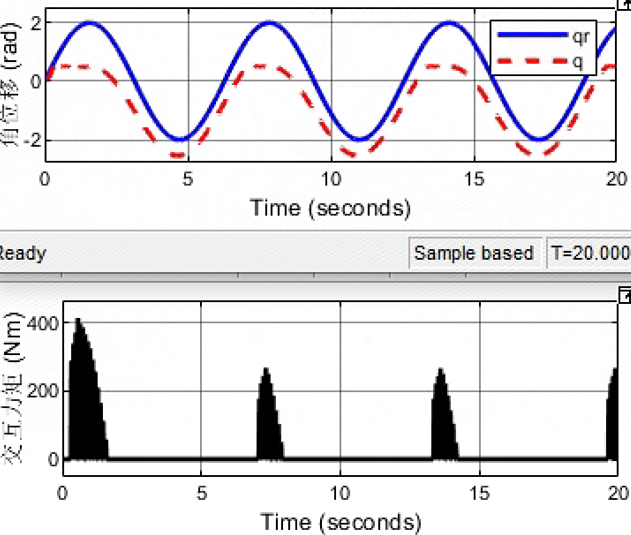
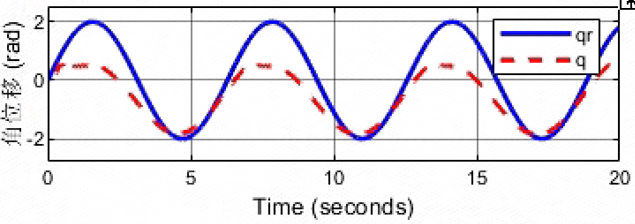
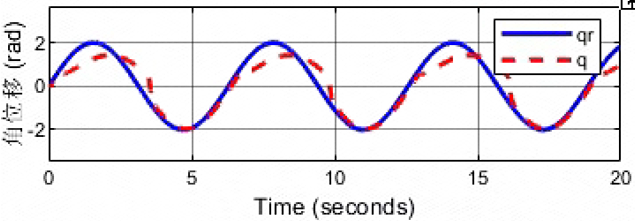
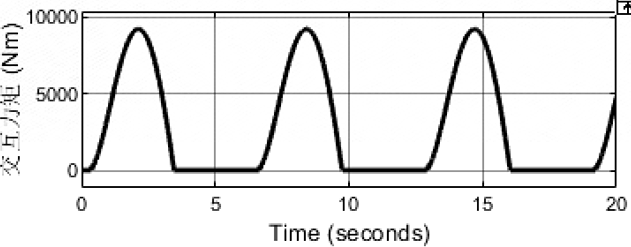
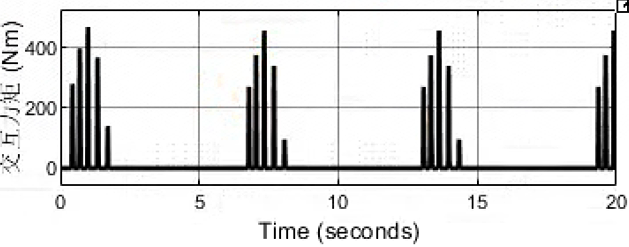
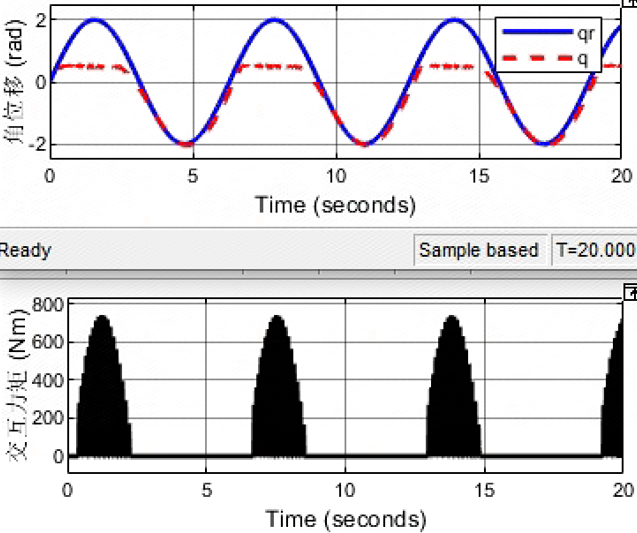
虚拟阻抗为:kd=100,bd=10,md=1
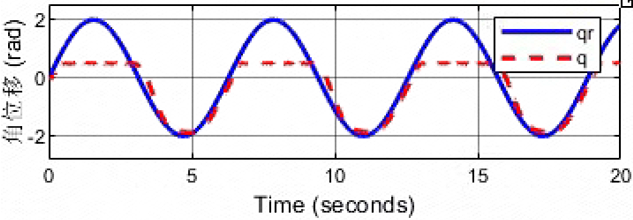
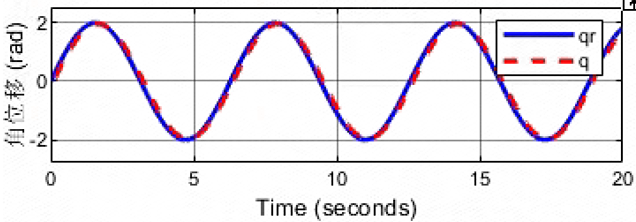
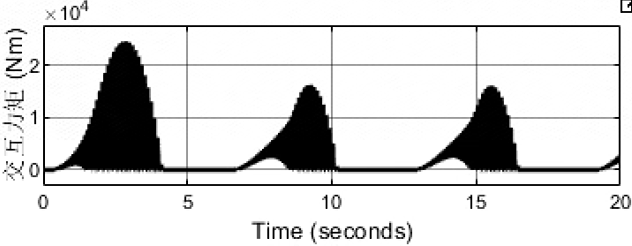
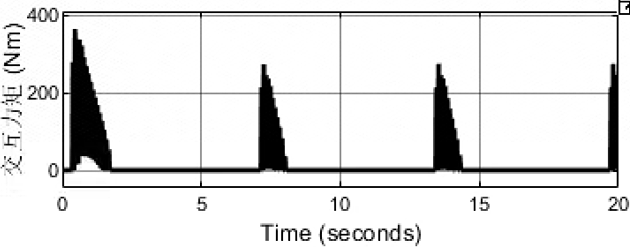
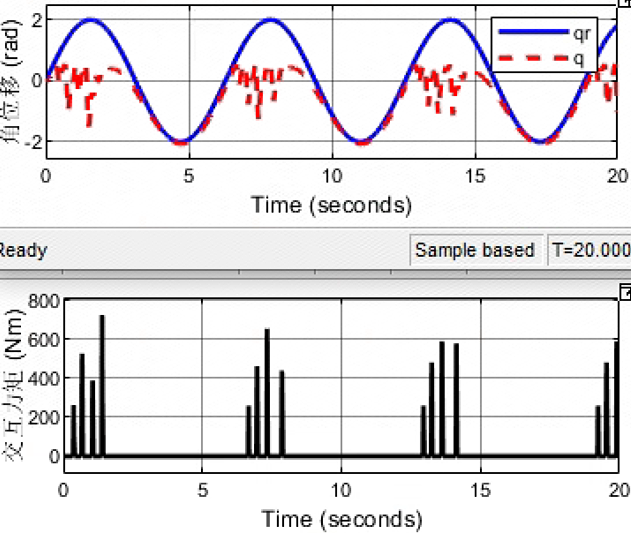
虚拟阻抗为:kd=100,bd=10,md=5

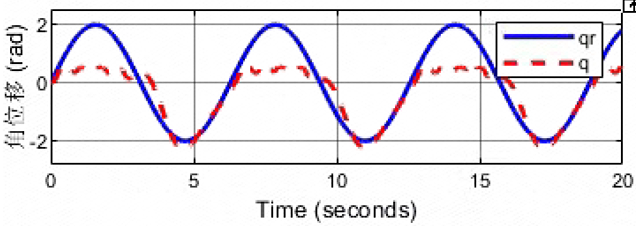
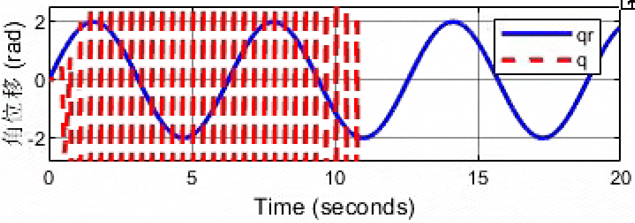
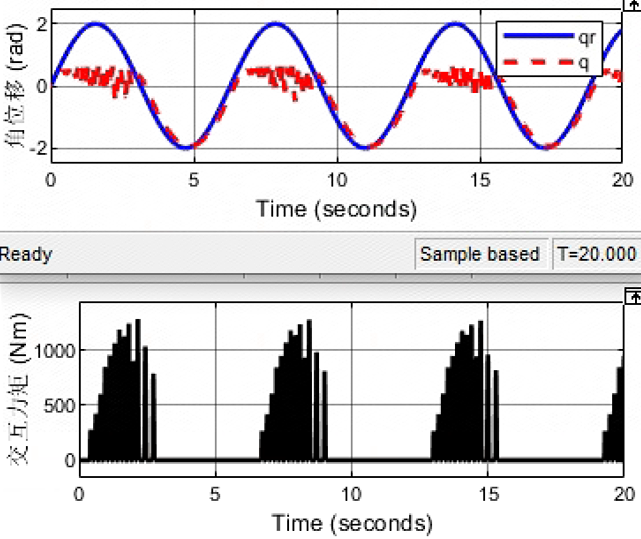
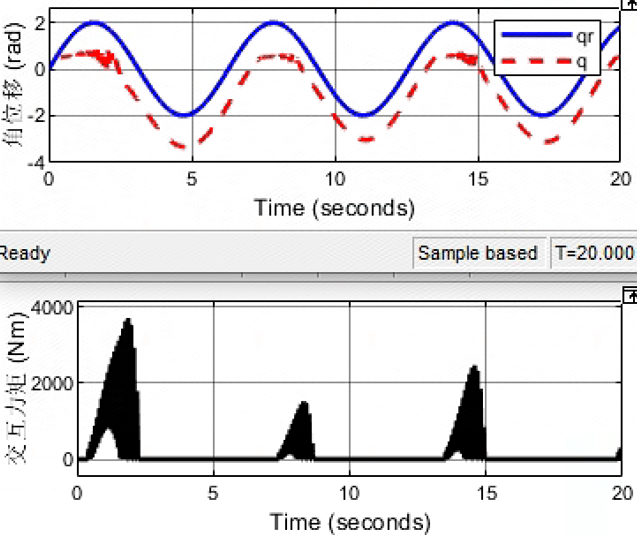
虚拟阻抗为:kd=100,bd=10,md=10
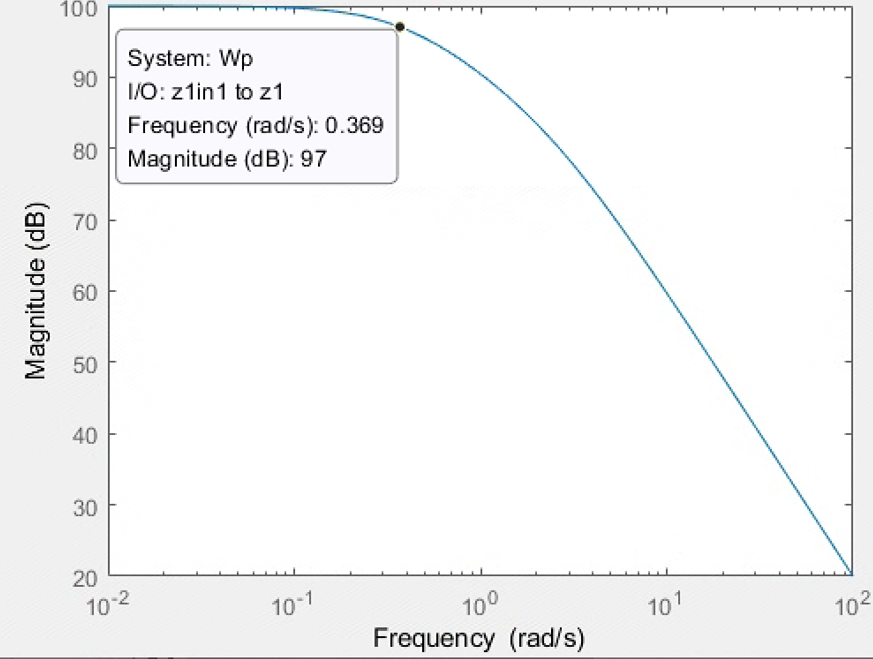
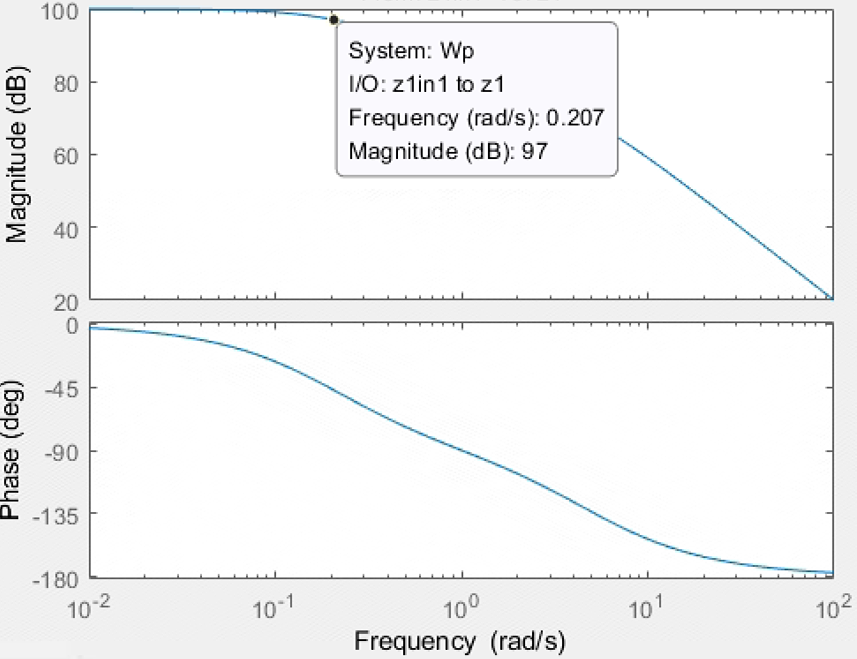
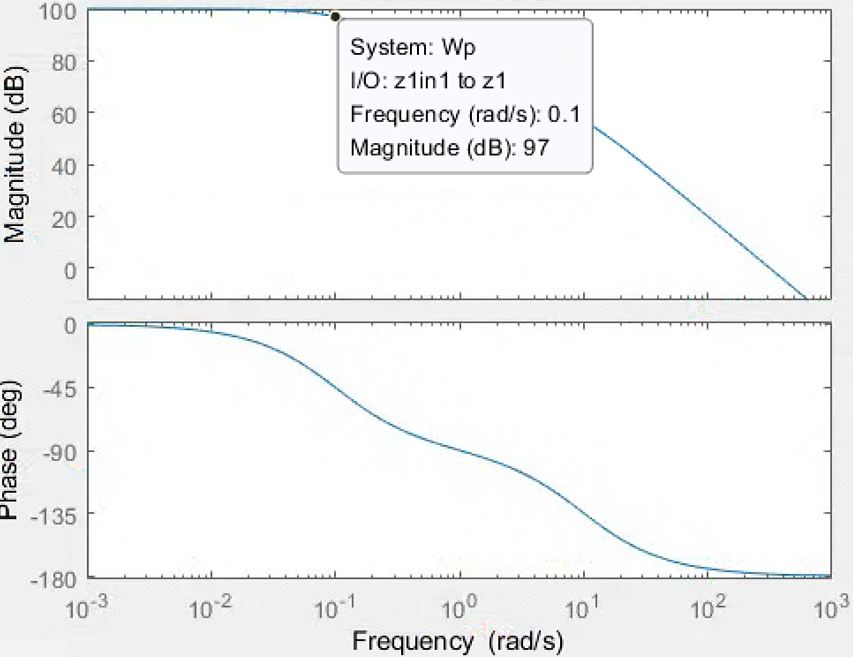
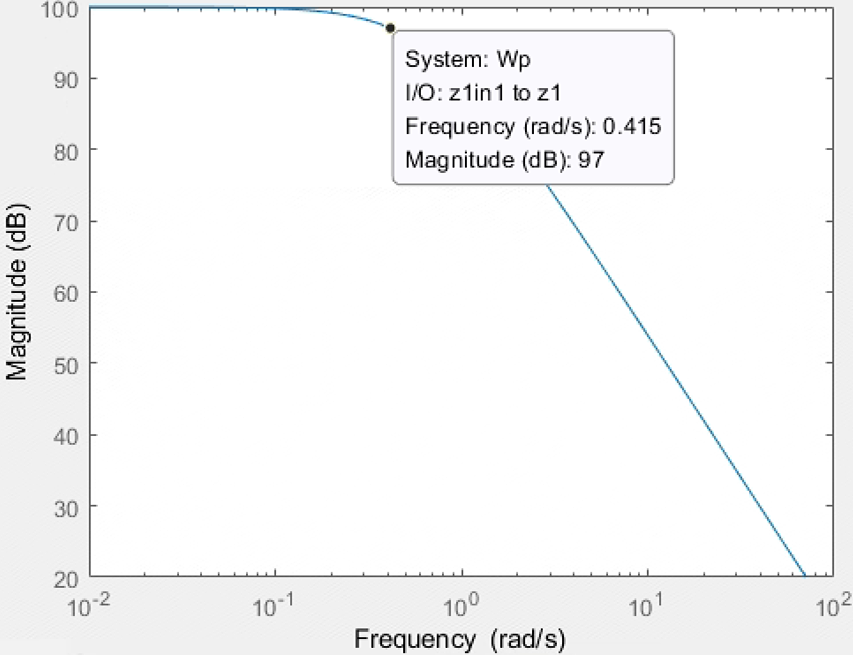
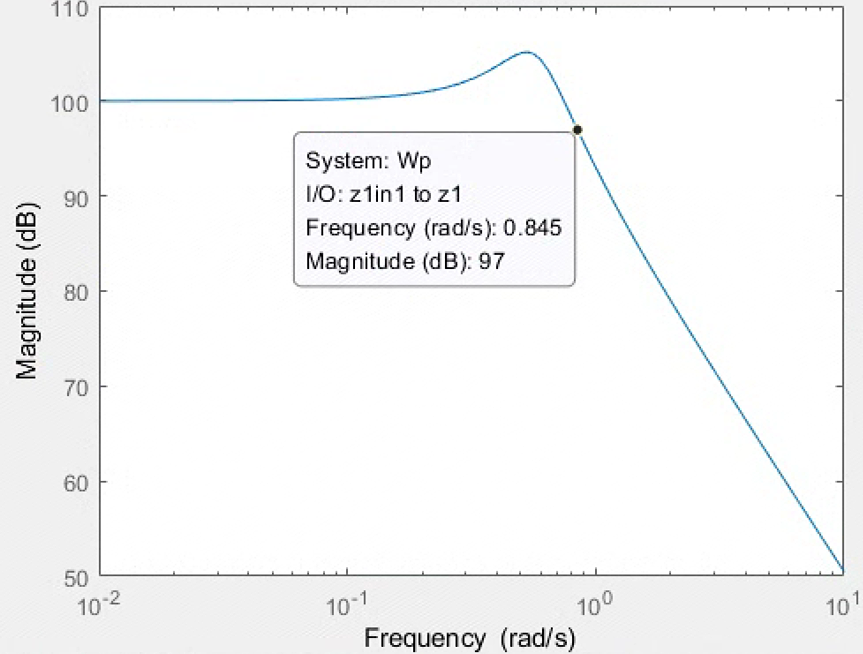
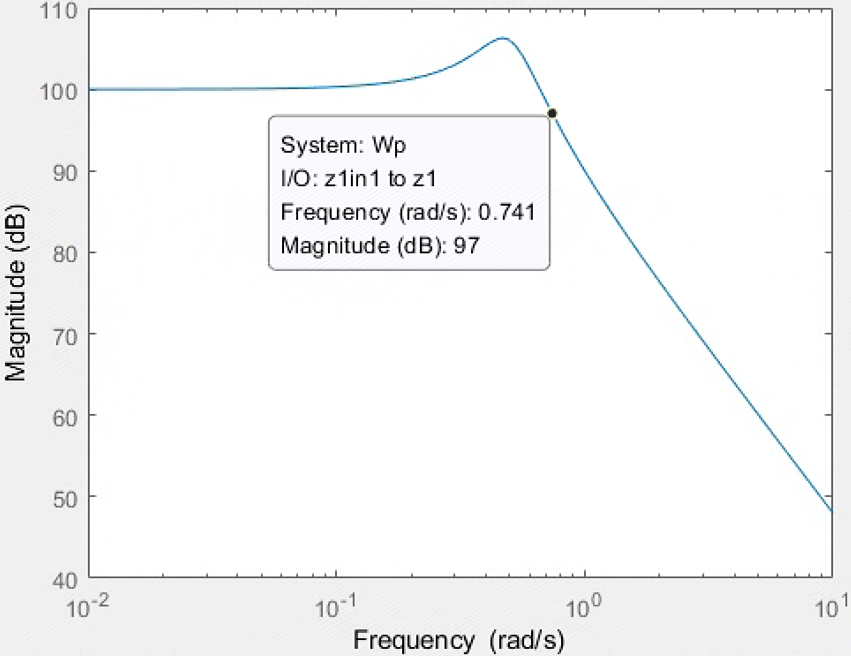
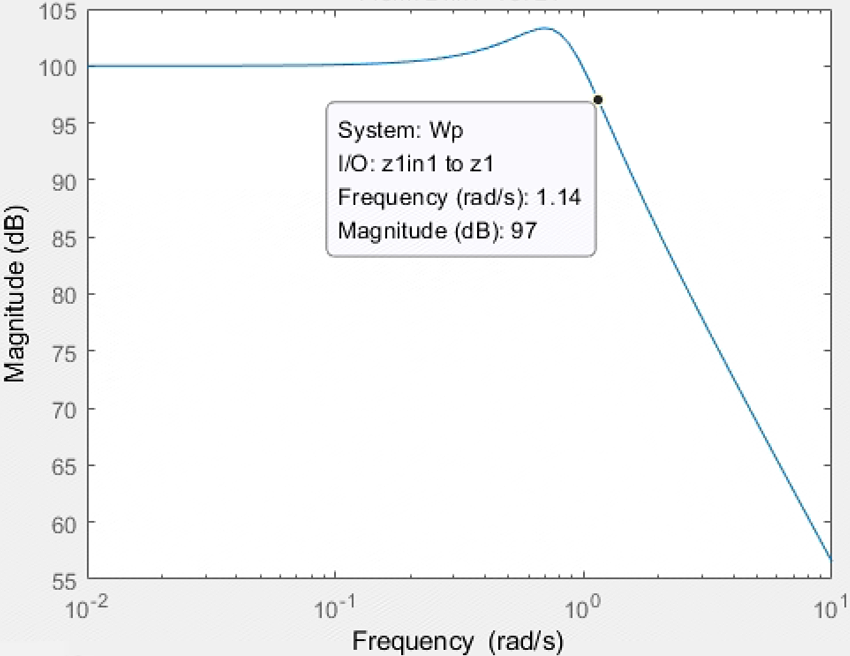
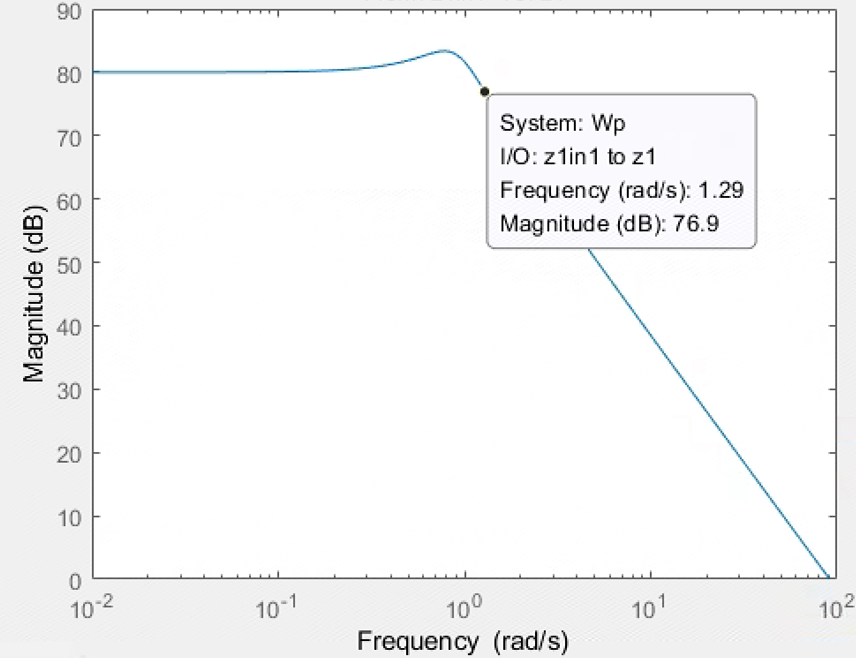
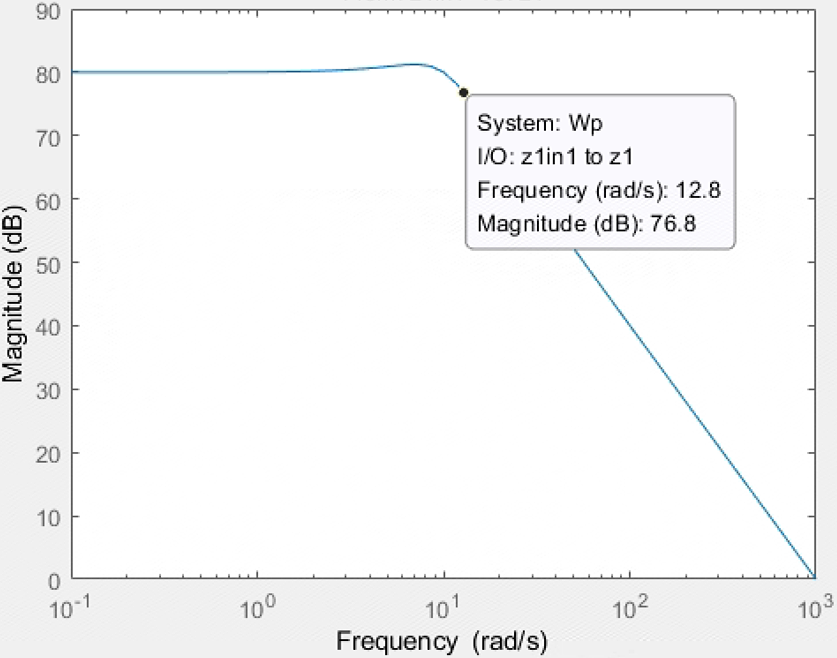
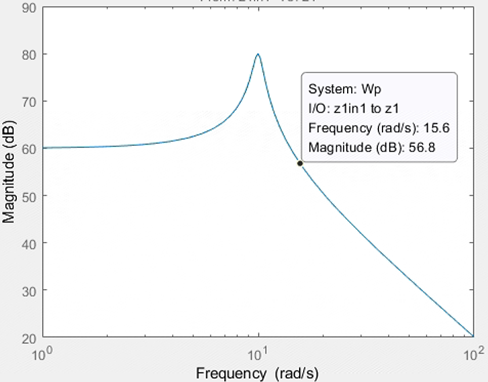
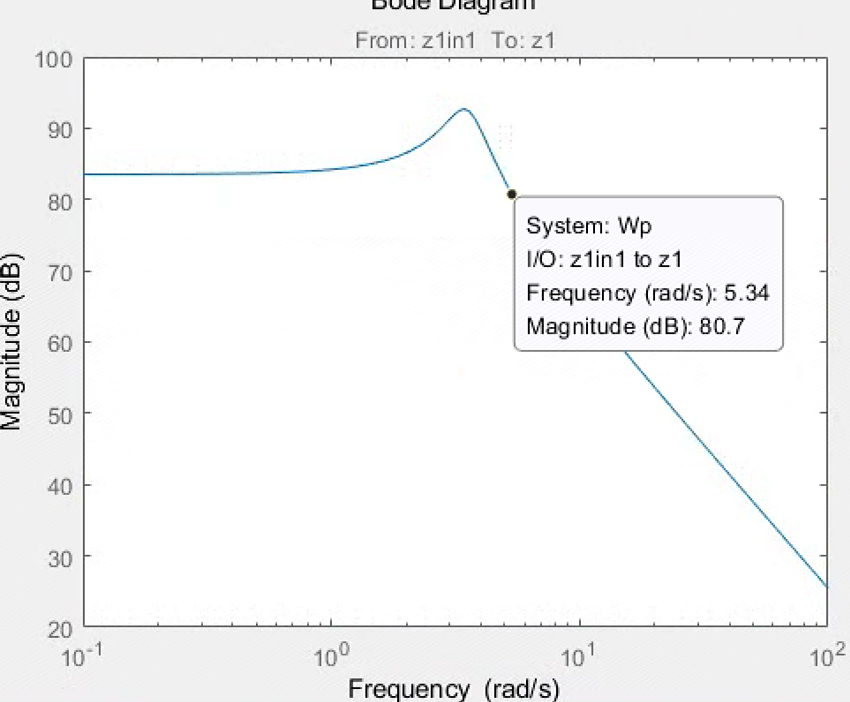
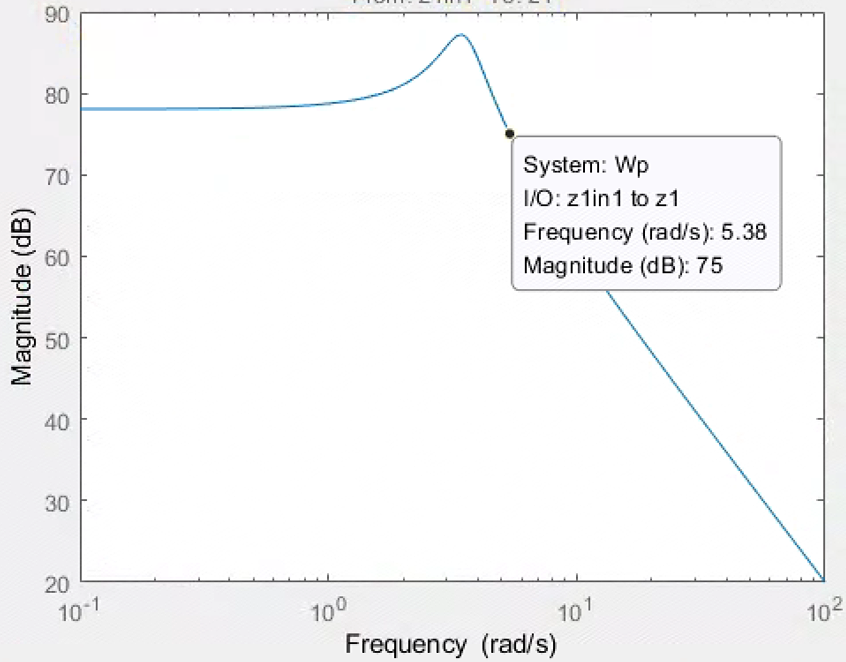
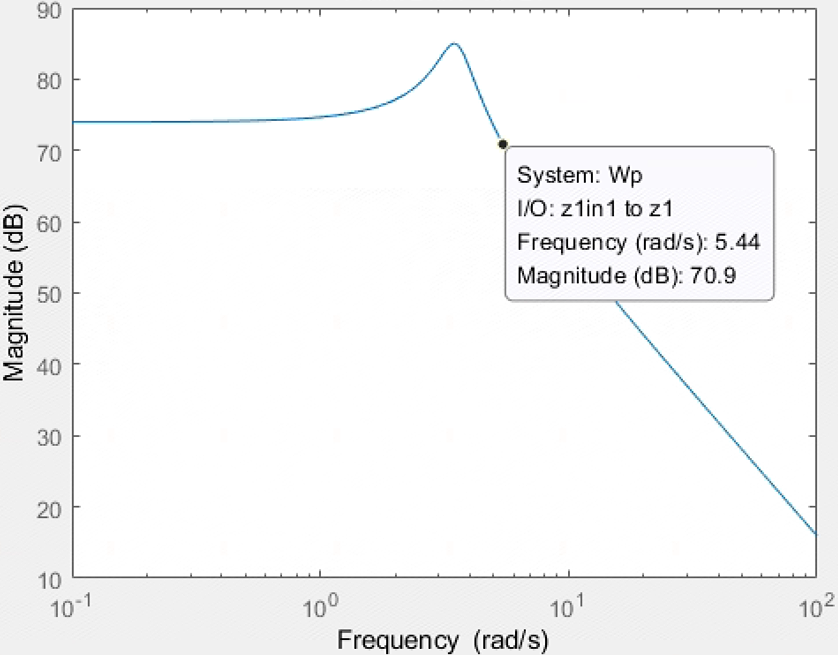
性能滤波函数的Bode图:
bode(1e5/(0.0005*s^2+5*s+1))
bode(5e4/(0.1*s^2+3*s+1))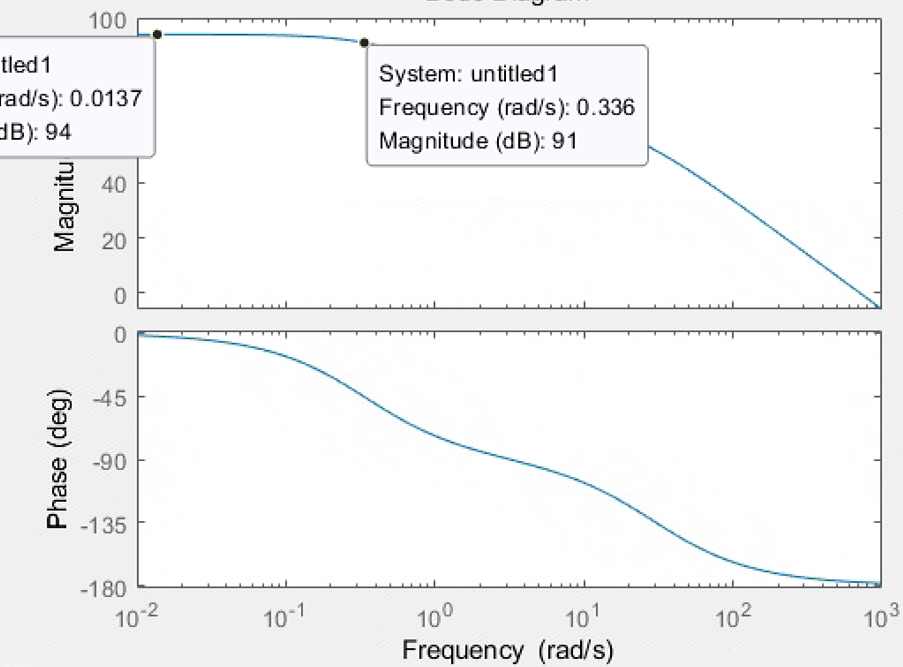
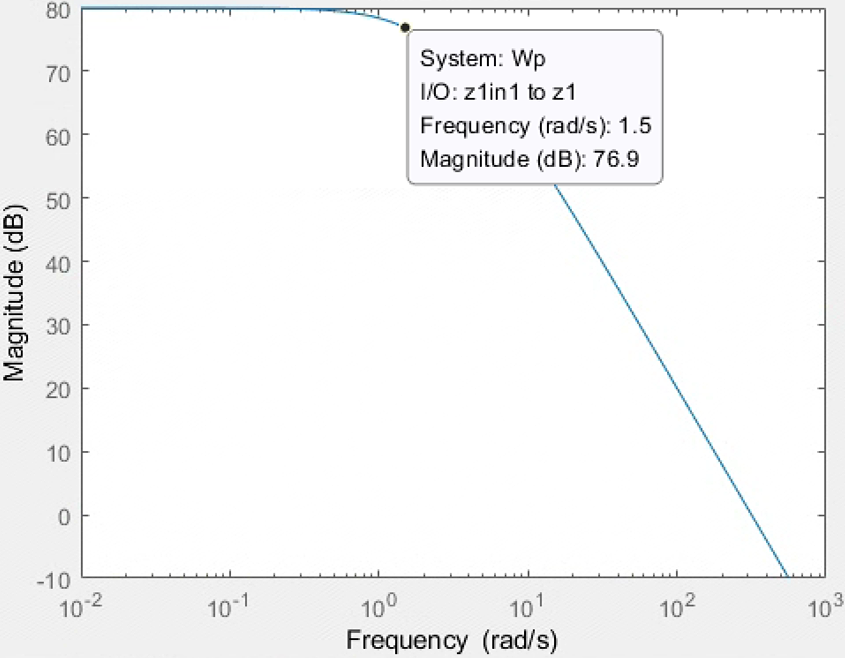
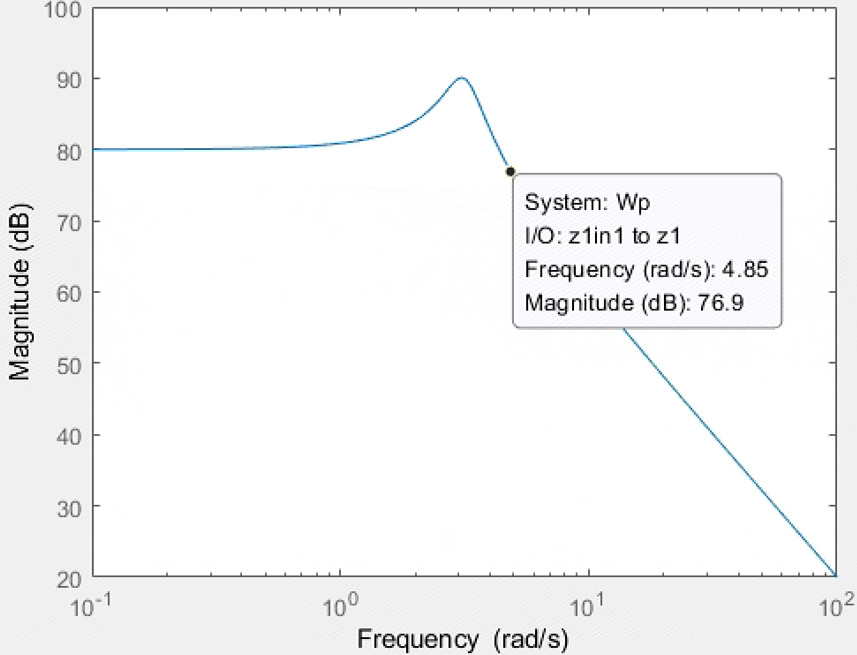
性能低通滤波调参
1e5/(1*s^2+3*s+1)
1e5/(1*s^2+5*s+1)
1e5/(1*s^2+10*s+1)
1e5/(2*s^2+3*s+1)
1e5/(2*s^2+1*s+1)

1e5/(3*s^2+1*s+1)
1e5/(4*s^2+1*s+1)
1e5/(1.5*s^2+0.9*s+1)
1e4/(1.2*s^2+0.8*s+1)
1e4/(0.1*s^2+0.8*s+1)
1e4/(0.1*s^2+0.1*s+1)
kd=10,bd=100
1e4/(0.01*s^2+0.1*s+1)
Wp = 1e3/(0.01*s^2+0.01*s+1)

Wp = 1e3/(0.001*s^2+0.01*s+1);

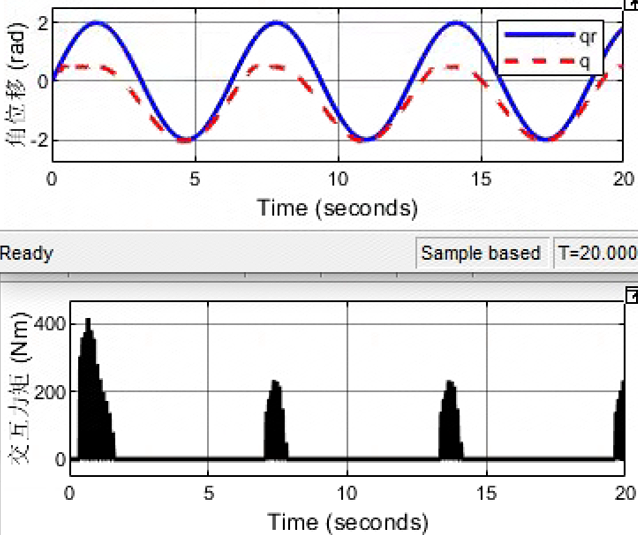
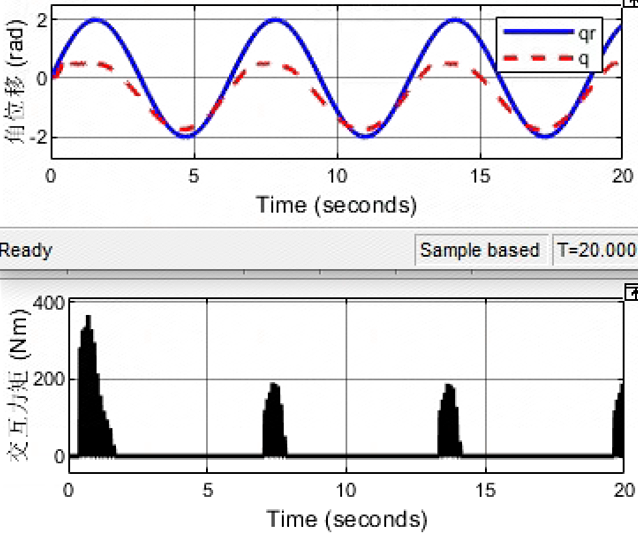
精度与鲁棒性的抉择!!!
1.5e4/(0.08*s^2+0.1*s+1)
8e3/(0.08*s^2+0.1*s+1)
5e3/(0.08*s^2+0.08*s+1)
5e3/(0.1*s^2+0.01*s+1)
————————————————————————————————————————
低阻抗模式下的刚性接触
1e5/(0.0005*s^2+5*s+1)
纯弹簧接触
kd=10
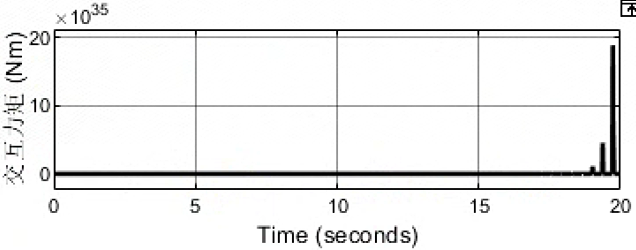
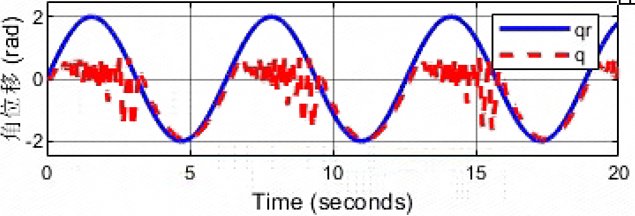
直接发散了!!!
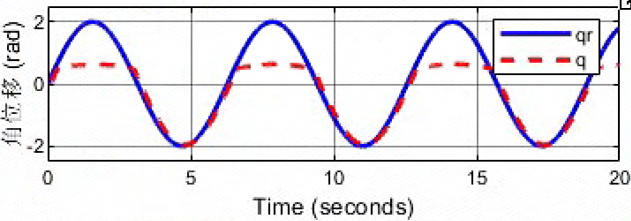
kd=100
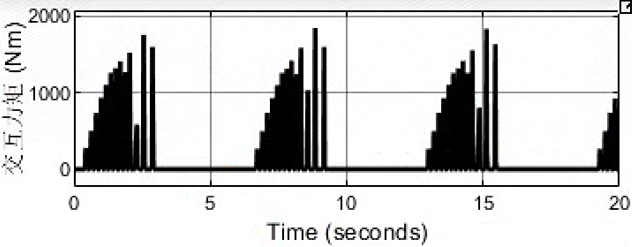
没有发散,但是刚性冲击过程振荡现象较为明显,这不是所期望的!!!
kd=1000
kd=10000

物极必反,刚度过大会引起较大振荡,意思是类似于两个纯刚体进行碰撞,势必会引起较大的振荡!!!
kd=100000
但阻抗实现性能就会很弱!!!
kd=1000000
粘弹性接触
kd=10,bd=1
kd=10,bd=10
说明增大阻尼起到了减小震荡的作用。
kd=10,bd=15

kd=10,bd=20
kd=10,bd=100
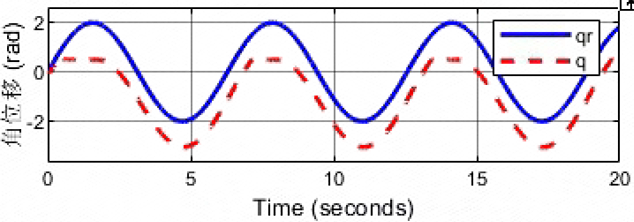
Kd = 100; Bd = 10
Kd = 100; Bd = 100
Kd = 100; Bd = 1000
呈现质量-阻尼-弹簧动态
Kd = 10; Bd = 10 ; Md = 0.01;
Kd = 10; Bd = 10 ; Md = 0.1;

Kd = 10; Bd = 10 ; Md = 1;
Kd = 10; Bd = 10 ; Md = 2;
————————————————————————————————————
这篇关于阻抗控制下机器人接触刚性环境振荡不稳定进行阻抗调节的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







