障碍物专题

Java:路径计算与障碍物处理
Java 实现寻找字符串数组中的最长公共前缀及不同路径数量计算(含障碍物) 在计算机科学和软件开发中,经常需要解决一些基本但实用的问题。本文将介绍两种常见问题的解决方案:一是从一组字符串中找出最长公共前缀;二是计算在一个存在障碍物的网格中从起点到终点的不同路径数量。我们将通过具体的 Java 代码实现来探讨这两种问题的解决方法。 寻找字符串数组中的最长公共前缀 在编程领域,我们不时地面临挑
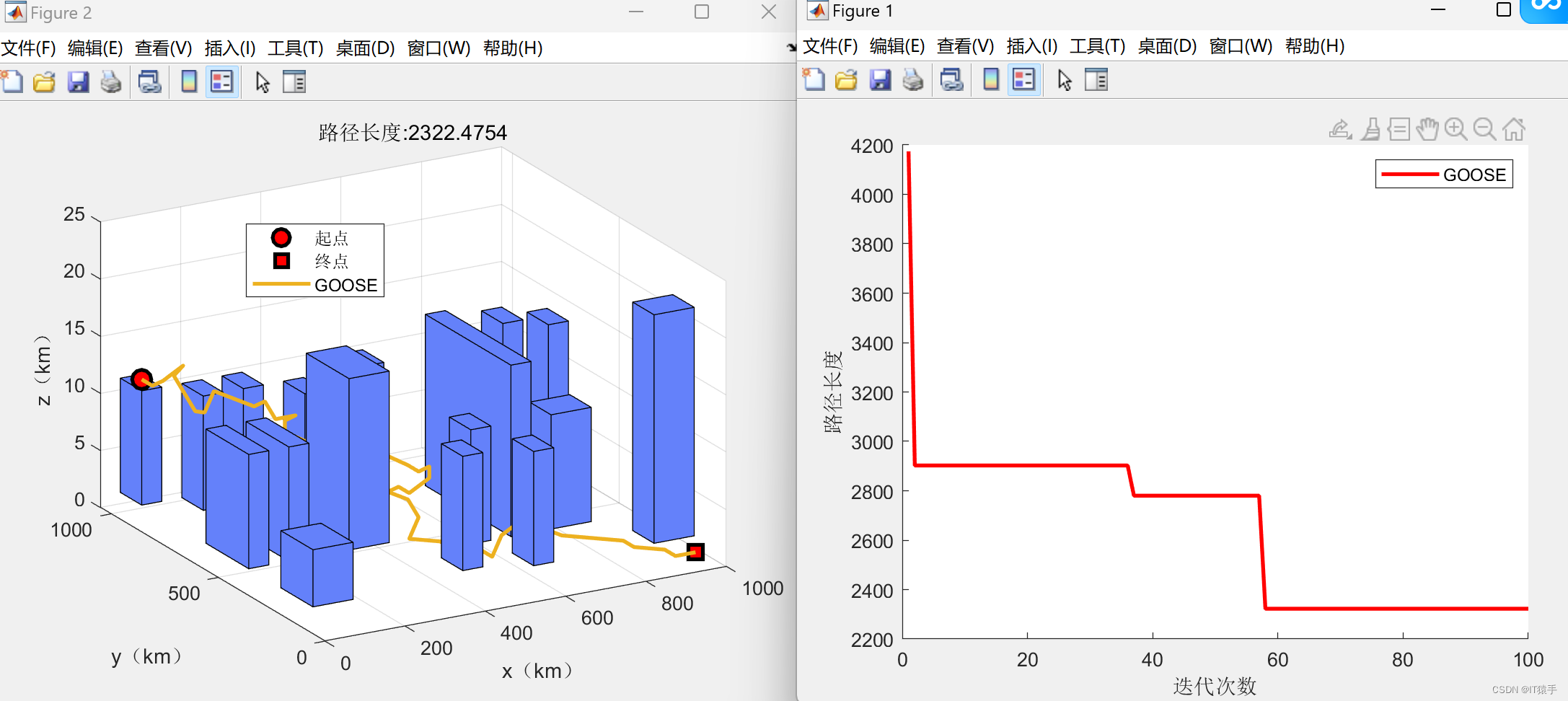
鹅算法(GOOSE Algorithm,GOOSE)求解复杂城市地形下无人机避障三维航迹规划,可以修改障碍物及起始点(Matlab代码)
一、鹅算法 鹅优化算法(GOOSE Algorithm,GOOSE)从鹅的休息和觅食行为获得灵感,当鹅听到任何奇怪的声音或动作时,它们会发出响亮的声音来唤醒群中的个体,并保证它们的安全。 参考文献 [1]Hamad R K, Rashid T A. GOOSE algorithm: a powerful optimization tool for real-world engineering

栅格地图、障碍物地图与膨胀地图(膨胀地图(二)写一张膨胀地图)
前面看完了膨胀地图相关的内容,这里根据前面看过的内容手搓一张膨胀地图试一下。 1、数据预处理 第一步,先进行数据预处理,为了后续计算方便,首先在这里预先计算两张二维数组表,后续遍历时会用到这张表: void map_test3::computeCaches(){//Case 1:如果栅格的膨胀半径是0,那就直接返回。if (robot_radius == 0)return;cached_d

栅格地图、障碍物地图与膨胀地图(膨胀地图(一))
前面看过了静态地图与障碍物地图,但是对于路径规划而言,这两个地图是不够的,还需要第三张地图,也就是膨胀地图。膨胀地图的意思还是比较好理解的,就是将地图的障碍物进行膨胀。为什么要这么操作呢,主要是考虑路径规划时,对于静态地图而言,不太好进行路径规划,因为一个栅格点虽然它可能是空闲的,但是如果它离障碍物很近的话,实际上这个点机器人是不能到达的,所以我们需要对地图按照机器人半径进行膨胀,这样子剩下的点才
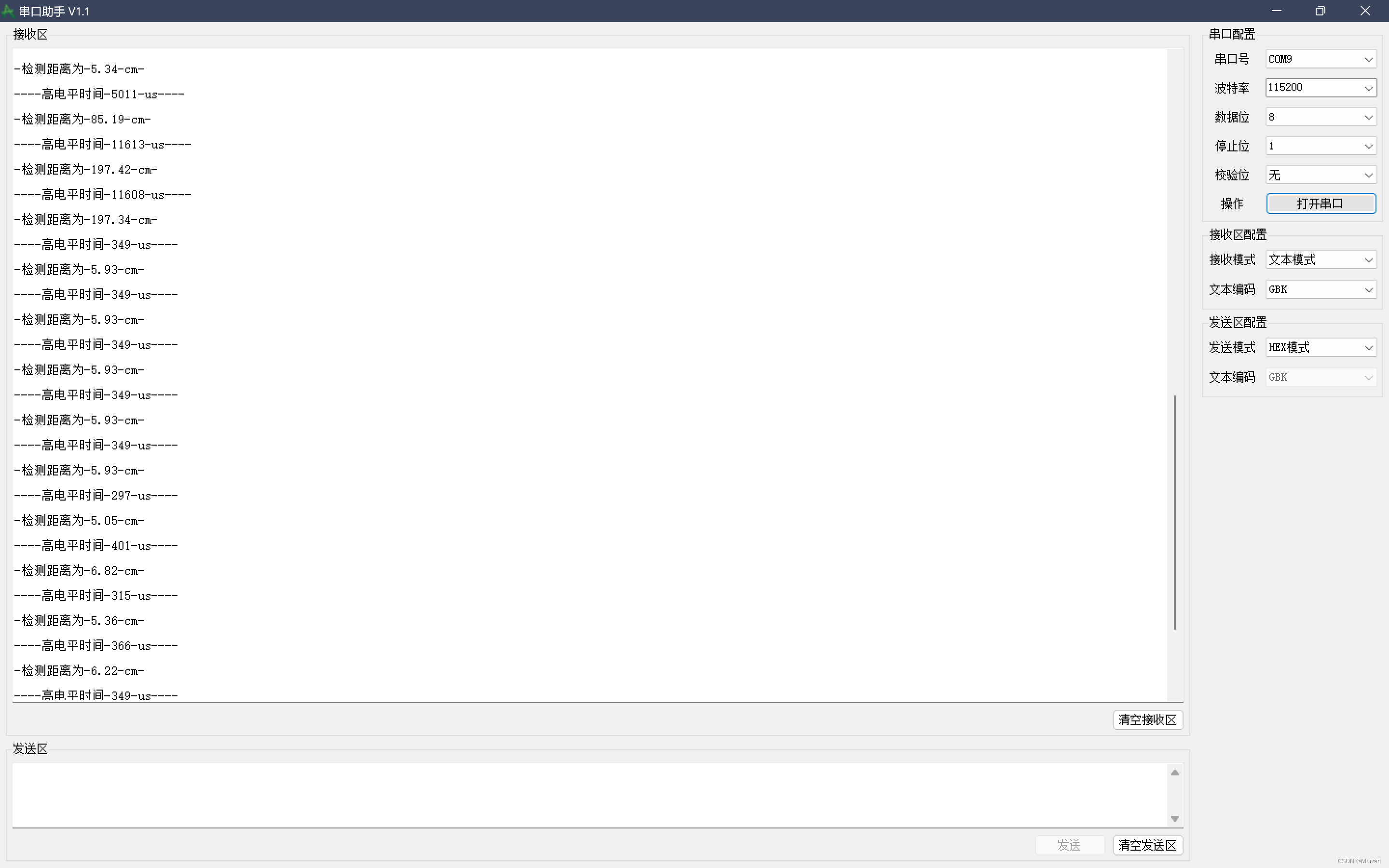
STM32F103C8T6 HC-SR04超声波模块——超声波障碍物测距(HAl库)
超声波障碍物测距 一、HC-SR04超声波模块(一)什么是HC-SR04?(二)HC-SR04工作原理(三)如何使用HC-SR04(四)注意事项 二、程序编写(一)CubeMX配置1.芯片选择2.配置RCC、SYS、时钟树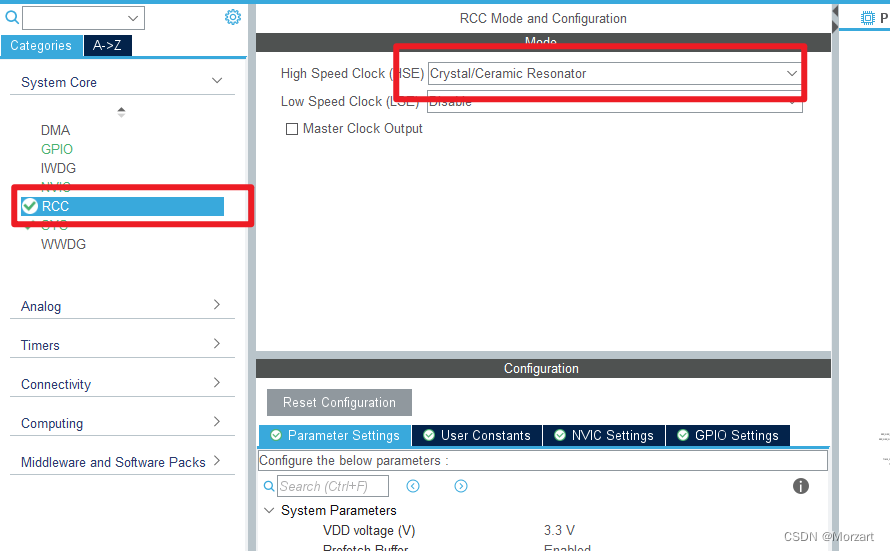3
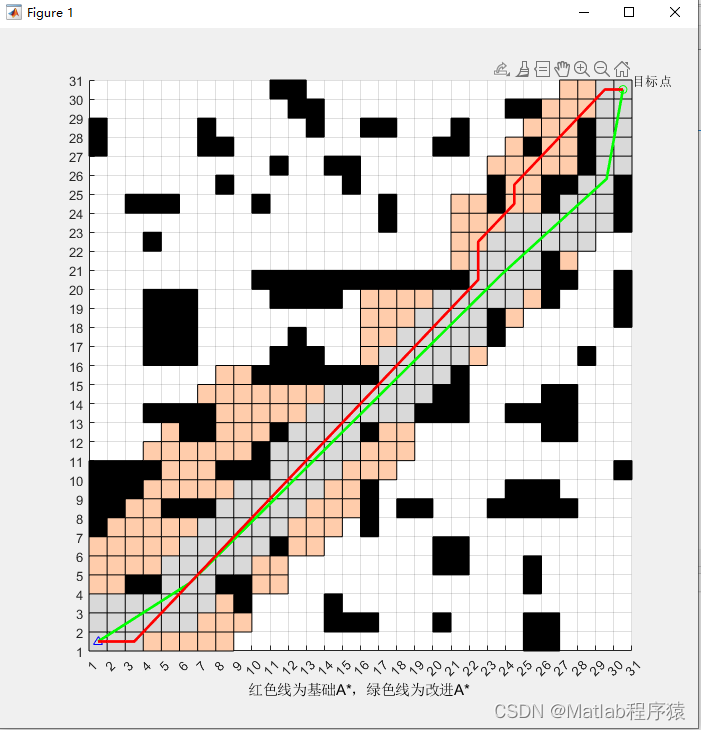
【MATLAB源码-第208期】基于matlab的改进A*算法和传统A*算法对比仿真;改进点:1.无斜穿障碍物顶点2.删除中间多余节点,减少转折。
操作环境: MATLAB 2022a 1、算法描述 改进A*算法的优点分析 改进A*算法相对于传统A*算法在多个方面进行了优化,包括避免斜穿障碍物顶点、删除中间多余节点以及提高搜索效率。这些改进措施使得路径规划更加高效、安全和可靠,特别是在复杂环境中表现尤为突出。本文将详细讨论这些改进及其带来的优点。 1. 避免斜穿障碍物顶点,避免碰撞 在路径规划过程中,斜穿障碍物顶点会带来很大的风险

栅格地图、障碍物地图与膨胀地图(障碍物地图(二))
上一篇大致看完了障碍物地图的初始化内容以及对于传感器数据的处理,我们知道在该部分算法维护了一个ObservationBuffer,其中存储了一段时间内的点云数据。每次新的数据进来后,还会根据设定的时间参数observation_keep_time抛弃比较久远的障碍物点云。但是在看的过程中,我们也产生了一些疑惑,比如ObservationBuffer本身维护的是一系列世界坐标系下的pointclou

【论文解读】空中机器人利用机载电脑感知计算躲避动态小障碍物
标题:Avoiding dynamic small obstacles with onboard sensing and computating on aerial robots 作者:Fanze Kong, Wei Xu, Fu Zhang 来源:https://arxiv.org/abs/2103.00406 代码:https://github.com/hku-mars/dyn_small_

障碍物识别技术赋能盲人独立出行:一场静默的科技革新
作为一名资深记者,我始终关注并报道那些科技如何助力特殊群体克服生活挑战的动人故事。近期,一款叫做蝙蝠避障的应用进入了我的视线,它搭载先进障碍物识别技术以其独特的优势,悄然为视障人士的独立出行带来了显著变革。 “障碍物识别技术”,这一词汇所蕴含的,正是这款应用赋予盲人出行的关键能力。过去,我们谈论盲人出行,往往会联想到导盲犬、盲杖等传统辅助工具,它们虽有效,但存在一定的局限性。而如今,依托于“
点云从入门到精通技术详解100篇-基于激光点云和视觉融合的智能车前方障碍物检测(中)
目录 2.2.3 边界框回归 2.3 基于单目相机和 IMU 的障碍物实时测距 2.3.1 单目测距方法研究
使用Pointpillar神经网络识别rosbag中的障碍物
PointPillar-ROS-Node https://github.com/MengWoods/pointpillar-ros-node 调试了一份可以使用的Pointpillar ROS node代码,并发布到了上面的仓库。 运行Node,并play rosbag,使用rviz就可以显示障碍物的BBox。 具体可以参考repo的README文档,文档非常详细的记录了如何使用与环境设置。
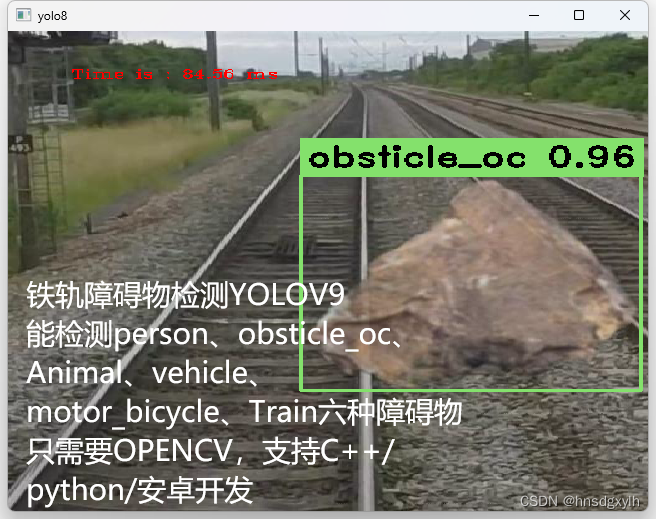

基于YOLOv8/YOLOv7/YOLOv6/YOLOv5的障碍物检测系统(深度学习代码+UI界面+训练数据集)
摘要:开发障碍物检测系统对于道路安全性具有关键作用。本篇博客详细介绍了如何运用深度学习构建一个障碍物检测系统,并提供了完整的实现代码。该系统基于强大的YOLOv8算法,并对比了YOLOv7、YOLOv6、YOLOv5,展示了不同模型间的性能指标,如mAP、F1 Score等。文章深入解释了YOLOv8的原理,提供了相应的Python代码、训练数据集,并集成了一个基于PySide6的界面。 系统能
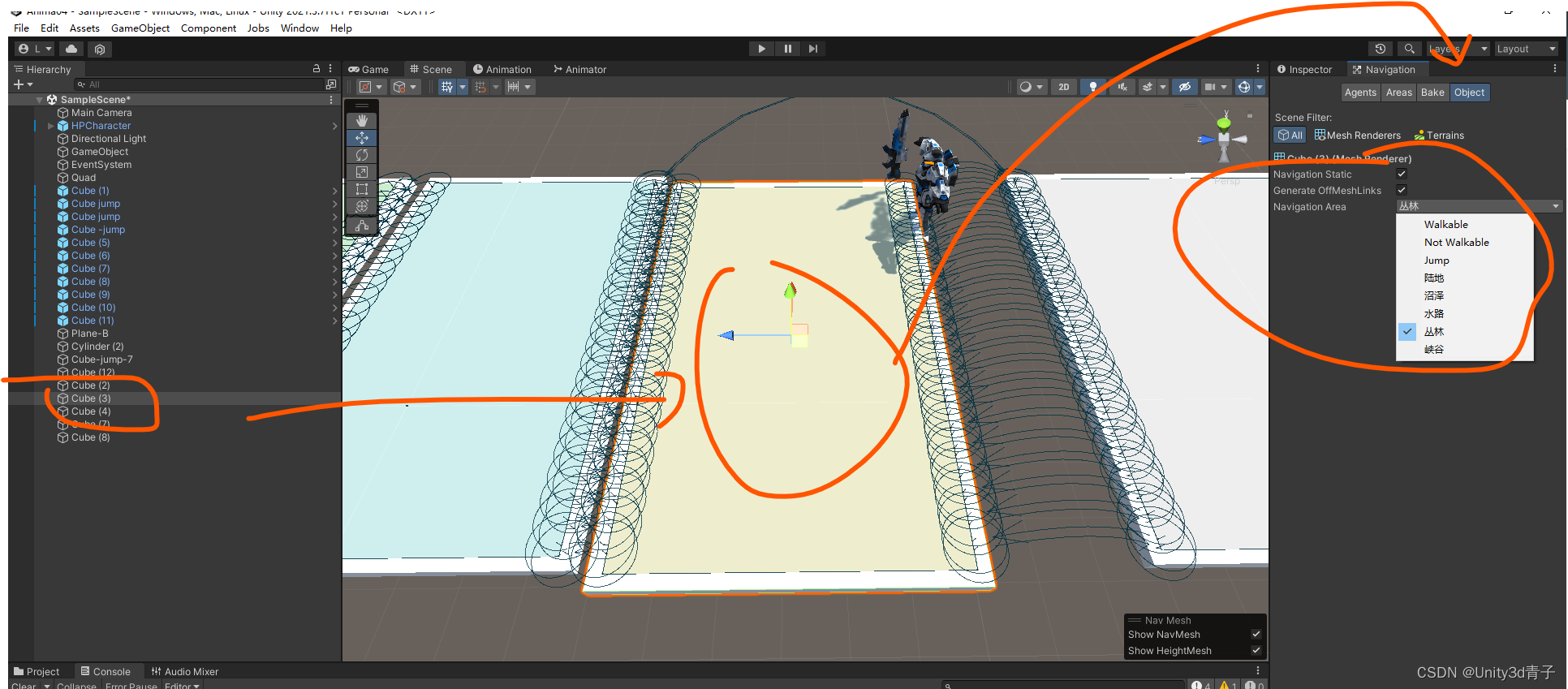
【Unity自动寻路】使用Navigation系统实现物体自动寻路绕开障碍物
知识点流程图 自动导航Navigation系统 我们在游戏场景中经常会有一些障碍物、墙壁、树木等等,如果我想要让角色或者怪物去墙的另一边,我直接在墙另一边点击左键,我希望角色自动跑过去,但是他不能直接穿透墙,他需要“智能”的绕开障碍物,自动找到可以走的路,自己过去!这就是Unity 的 Navigation导航系统帮助我们做的事情!请看大屏幕! Unity中的Navigation

A*算法项目实践之二:基于障碍物避碰的栅格路径生成
A*算法项目实践之二:基于障碍物避碰的栅格路径生成 实际问题描述A*算法的实现增加障碍物避碰的必要性增加障碍物避碰的思路实现代码实验结果 在上文—— A算法项目实践之一:栅格法的使用与障碍物栅格的生成中,我们生成了栅格地图,接下来就需要使用A* 算法找寻路径了,本文就笔者实际项目的一些经验来谈谈相关的方法,若有不对,请在评论区提醒笔者予以斧正 。 本项目基于VS2017,整个项

【动态规划之路径问题】路径条数与带障碍物的路径条数
⭐️前面的话⭐️ 本篇文章将介绍动态规划之路径条数的问题,我将通过两道力扣上面的题来介绍使用动态规划来解决路径条数问题以及路上存在障碍物时路径的条数。 📒博客主页:未见花闻的博客主页 🎉欢迎关注🔎点赞👍收藏⭐️留言📝 📌本文由未见花闻原创,CSDN首发! 📆首发时间:🌴2022年10月17日🌴 ✉️坚持和努力一定能换来诗与远方! 💭推荐书籍:📚《算法》,📚《算法导论》

ROS 导航定位调试过程及costmap中添加障碍物
ROS导航定位调试过程及costmap中添加障碍物 第一次在csdn写博客,先试试水。 最近在做slam,本来是先做的vslam中的orbslam,跑的效果不错,在产品上应用感觉还要增加imu,即采用vio。后来由于项目需求,快速跑通了ROS的导航、定位框架,gmapping建图,movebase定位、路径规划、导航、避障。这个过程需要激光和里程计即可,架构明晰。 (1)保存地图 在

ue4添加NPC-旋转的障碍物 浮点数时间轴
要让一个立方体不断地旋转。 要让它随着时间0-360不断地旋转,所以要让时间轴干点事,按照时间输出度数。 双击时间轴蓝图节点。 添加浮点轨道,然后取个名字。 这个关键帧的两个,时间和值全部设置为零,让它在初始位置。 一秒的地方添加关键帧,然后把这两个数值修改一下 点击一下这个就可以很直观地看到时间轴 把设置相对旋转地xyz轴展开,把时间轴地rotation赋值到z轴上,up
基于yolov5的目标检测-停车位检测、低矮障碍物、地面标识检测等
只用一个目标检测模型(没有关键点,没有旋转框,只有2D框,用yolo系列,ssd、centernet等都可以,只要是目标检测模型就行,本文用的是yolov5s),就可以在fisheye bev图上同时检测如下4条所指的所有类别,所有类别,所有类别,重要的事情说三遍 线车位、砖车位、空间车位、立体车位(包含水平、垂直、斜列)各种低矮障碍物接地框(轮档、限位杆,雪糕筒、地锁、隔离桩、

MFC学习笔记之四(音乐,文字输出,障碍物,弹窗)
(十)背景声音的播放 游戏大多都是有背景声音的,因此我们也不能免俗。 播放声音需要头文件,还需要导入声音文件库: #include "mmsystem.h" #pragma comment(lib,"winmm.lib")//导入声音头文件库 总之,这两行连用就可以了(更多的我也不知道)。 这两行放在需要使用下面代码的源代码文件中的开始处。 其次,需要使用mciSendStri

unity3d人工智能学习(3)——A*寻路算法(躲避障碍物)
A*寻路算法(躲避障碍物) 简单描述例子操作过程 参考:https://www.cnblogs.com/wangweixznu/p/5443078.html 简单描述 unity自带NavMesh寻路的功能。 在需要寻路的地形里选择下图的配置,walkable表示角色可以在这个范围自动寻路 例子操作过程 设置一个简单的场景,场景里有地面(plane),角色(AI)。

百度Apollo规划算法——OBB障碍物检测代码解析
百度Apollo规划算法——Box障碍物检测代码解析 前言代码代码分析f1f2f3f4f5f6 参考 前言 本文主要分析Apollo代码中函数bool Box::HasOverlap(const Box2d &box) const {}的数学原理。 在阅读此部分代码时,第一遍没看懂return的一堆什么意思,百度之后说是采用OBB原理,所以就去了解下OBB原理,回来看还是

自动驾驶中的障碍物时间对齐法
描述 自动驾驶算法使用的系统往往不是实时系统,因此每个节点间拿到的数据可能不是同一时间的数据,从而造成系统误差,针对这一现象,工程上往往采用时间对齐内插外推法。这里我们用感知障碍物来举例。 自动驾驶系统有许多重要模块,假设每个模块占用一个进程,即节点,那么进程与进程间需要相互通信来传递数据。决策规划节点需要感知节点传来的障碍物信息来做决策规划。假设在 t 1 t1 t1时间点,决策规划收到了感

『论文阅读|研究用于视障人士户外障碍物检测的 YOLO 模型』
研究用于视障人士户外障碍物检测的 YOLO 模型 摘要1 引言2 相关工作2.1 障碍物检测的相关工作2.2 物体检测和其他基于CNN的模型 3 问题的提出4 方法4.1 YOLO4.2 YOLOv54.3 YOLOv64.4 YOLOv74.5 YOLOv84.6 YOLO-NAS 5 实验和结果5.1 数据集和预处理5.2 训练和实现细节5.3 性能指标5.4 性能分析5.4.1 YO

PyBullet (四) 将圆柱体看作机器人,推动目标,让目标按照输入的路径在可移动障碍物中移动
将圆柱体看作机器人,推动目标,让目标按照输入的路径在可移动障碍物中移动 1. 整体思路1.1 分情况讨论1.1.1 锐角/直角 + 锐角1.1.1.1 计算垂足1.1.1.2 计算距离1.1.1.3 向“上”移动1.1.1.4 “推” 1.1.2 钝角 + 锐角1.1.2.1 计算垂足1.1.2.2 计算方向 1.1.3 锐角 + 直角1.1.3.1 “1.1.1.1”1.1.3.2 向“上

Apollo 7.0障碍物感知模型原型,SMOKE 单目3D目标检测,代码开源。
作者:黎国溥 CSDN博客专家,华为云-云享专家 首发:公众号【3D视觉开发者社区】 前言 SMOKE是一个one-stage的单目视觉障碍物检测模型,它认为2D检测对于单目3D检测任务来说是冗余的,且会引入噪声影响3D检测性能,所以直接用关键点预测和3D框回归的方式。 最近发布的百度Apollo 7.0中,摄像头障碍物感知也是基于这个模型改进的;它能实现实时推理,代码开源,值得学习一