本文主要是介绍基于yolov5的目标检测-停车位检测、低矮障碍物、地面标识检测等,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
只用一个目标检测模型(没有关键点,没有旋转框,只有2D框,用yolo系列,ssd、centernet等都可以,只要是目标检测模型就行,本文用的是yolov5s),就可以在fisheye bev图上同时检测如下4条所指的所有类别,所有类别,所有类别,重要的事情说三遍
- 线车位、砖车位、空间车位、立体车位(包含水平、垂直、斜列)
- 各种低矮障碍物接地框(轮档、限位杆,雪糕筒、地锁、隔离桩、树干、电线杆、石柱、石球、防撞桶、垃圾桶、消防箱等)
- 地面标识:地面箭头方向、减速带方向、残疾人标识等
- 接地点:地下车库防撞条、车轮的接地点
由于该数据没有标注和训练过,直接用我自己的模型输出的结果。为了适应我的模型输入尺寸,图像大小由原来的1024 x 1024 缩小到480x480,所以识别率和准确度没有我自己数据的高
识别部分结果视频请参考如下链接:
基于yolo5的停车位、低矮障碍物、地面标识检测_哔哩哔哩_bilibili![]() https://www.bilibili.com/video/BV1bu4y1b77V/?vd_source=7ea02dec745a8a6cb7a4ed1f84006629
https://www.bilibili.com/video/BV1bu4y1b77V/?vd_source=7ea02dec745a8a6cb7a4ed1f84006629
自动泊车之车位检测2_哔哩哔哩_bilibili只用一个目标检测模型(没有关键点,没有旋转框,只有2D框,用yolo系列,ssd、centernet等都可以,只要是目标检测模型就行,本文用的是yolov5s),就可以在fisheye bev图上同时检测如下4条所指的所有类别,所有类别,所有类别,重要的事情说三遍1、线车位、砖车位、空间车位、立体车位(包含水平、垂直、斜列)2、各种低矮障碍物接地框(轮档、限位杆,雪糕筒、地锁、隔离桩、树干、电线杆, 视频播放量 111、弹幕量 0、点赞数 1、投硬币枚数 0、收藏人数 1、转发人数 1, 视频作者 67496310807_bili, 作者简介 ,相关视频:基于yolov5的车位检测、低矮障碍物目标检测,车辆前后被堵住如何出车位,山东车神表演原地出车位,华为无人代客泊车视频火了智界S7一键自动找车位停车美欧感叹:比特斯拉厉害百倍,【问界】M5智驾版自动泊车,差点撞了!?,华为问界M5自动泊车居然可以选择压在车下的车位! #华为 #问界M5 #自动泊车,博越l 自动泊车 代客泊车,停车场遇到很窄的车位,如何安全快速的停车或者开门呢?,没想到啊,手机拿错了就没法自动泊车了,特斯拉自动泊车倒车入库失误版,目标检测台球![]() https://www.bilibili.com/video/BV1C64y1L7U8/?vd_source=7ea02dec745a8a6cb7a4ed1f84006629
https://www.bilibili.com/video/BV1C64y1L7U8/?vd_source=7ea02dec745a8a6cb7a4ed1f84006629
1、车位
如下类型的车位都支持,包括画线和砖类型车位等(用目标检测框做出来的噢,哈哈哈哈),立体车位和空间斜列车位数据集中没有,这里就不列举了
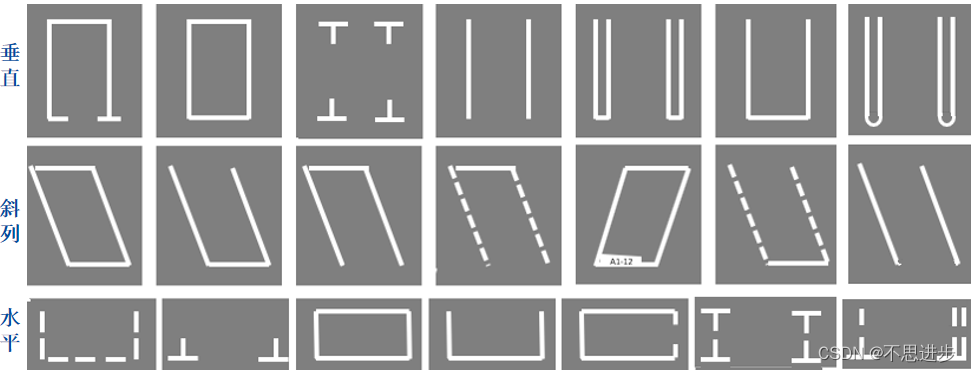
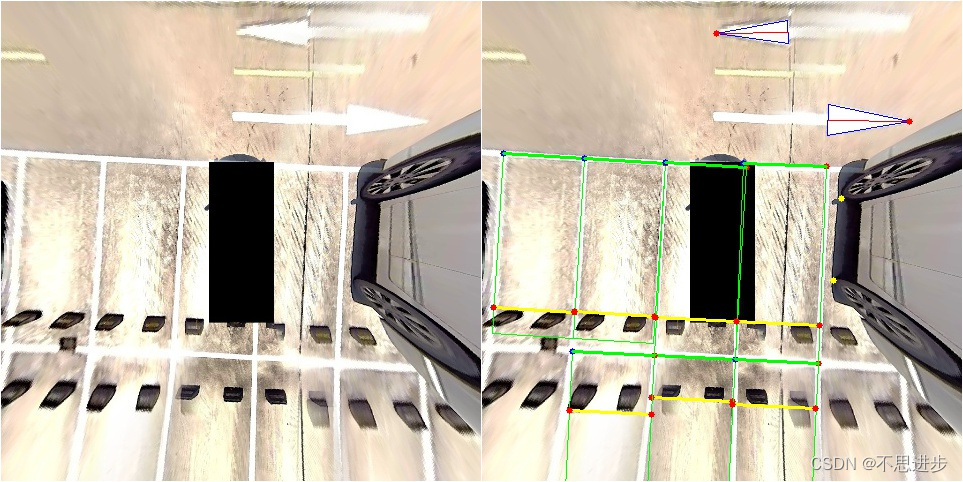
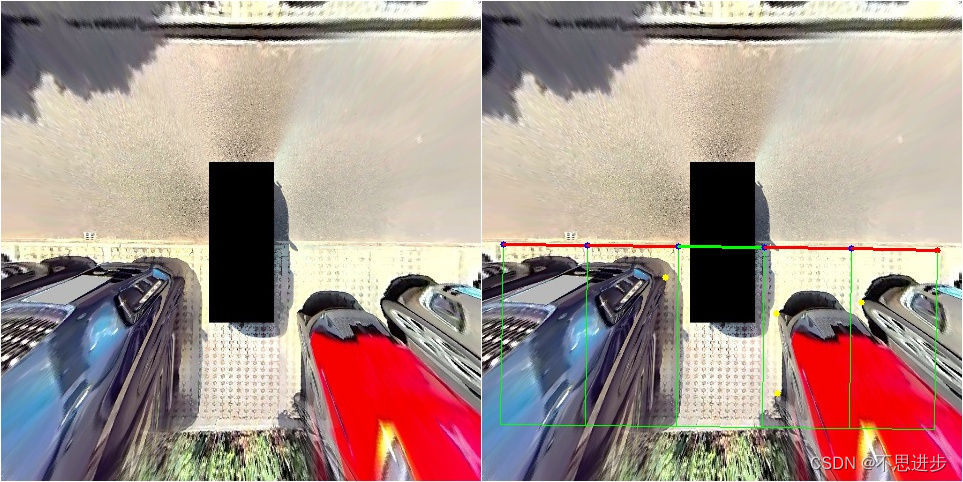
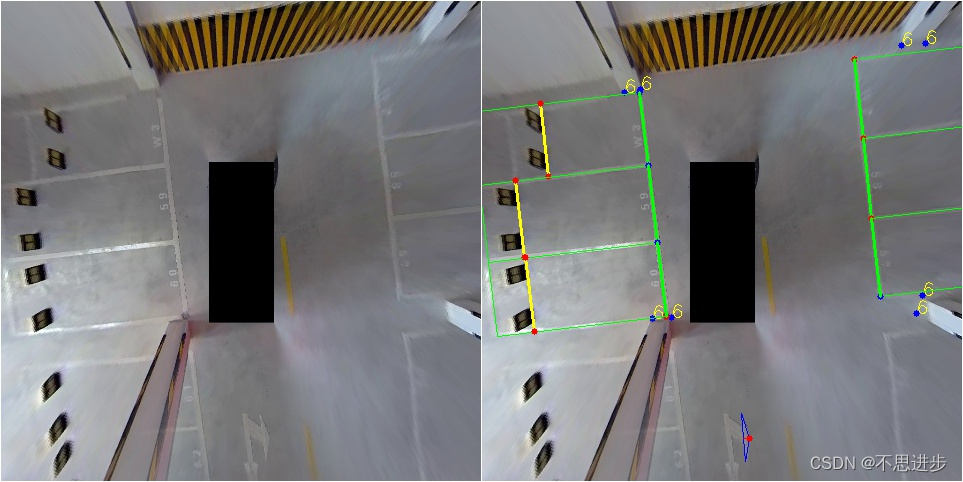
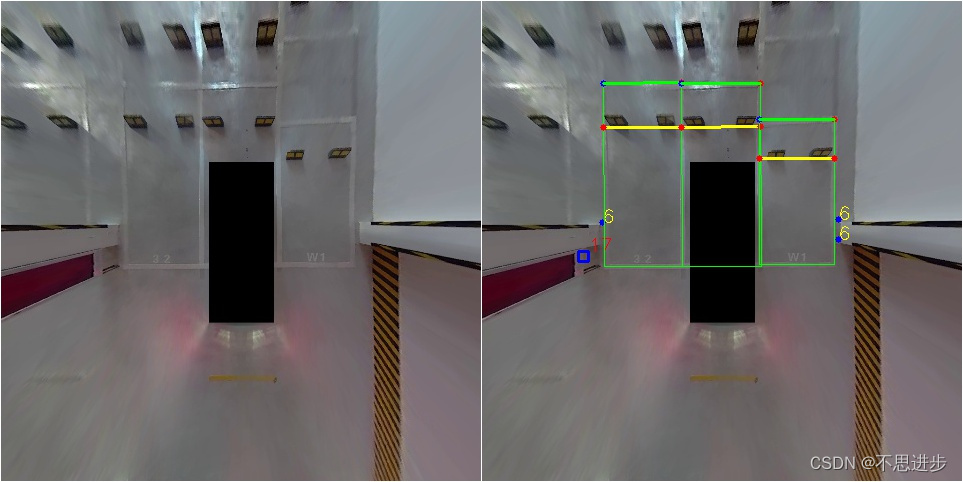
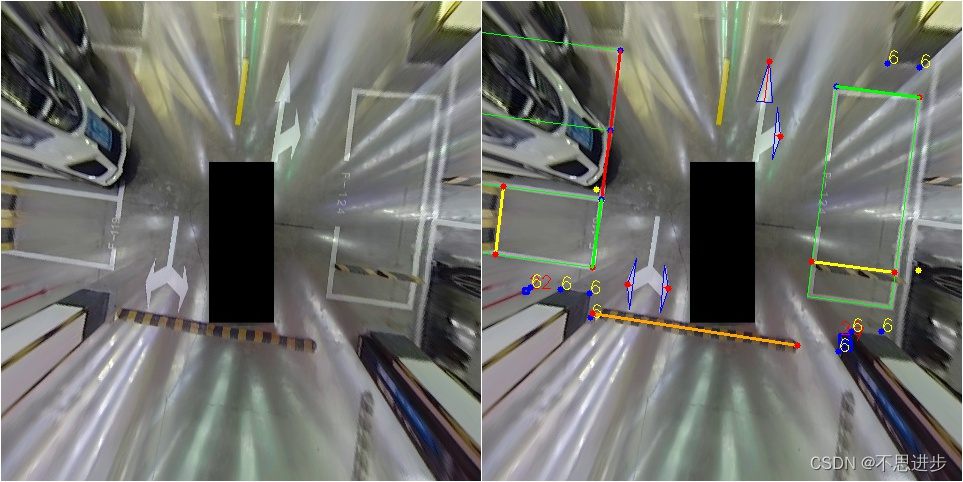
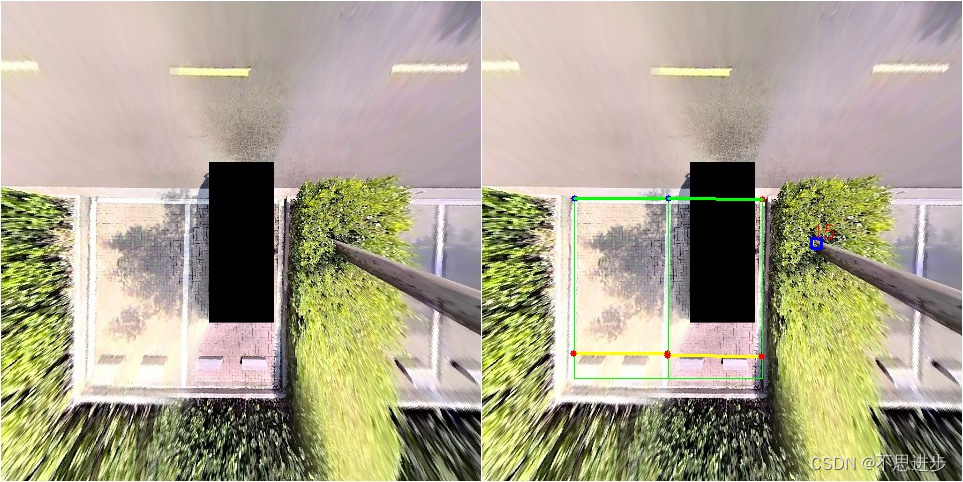
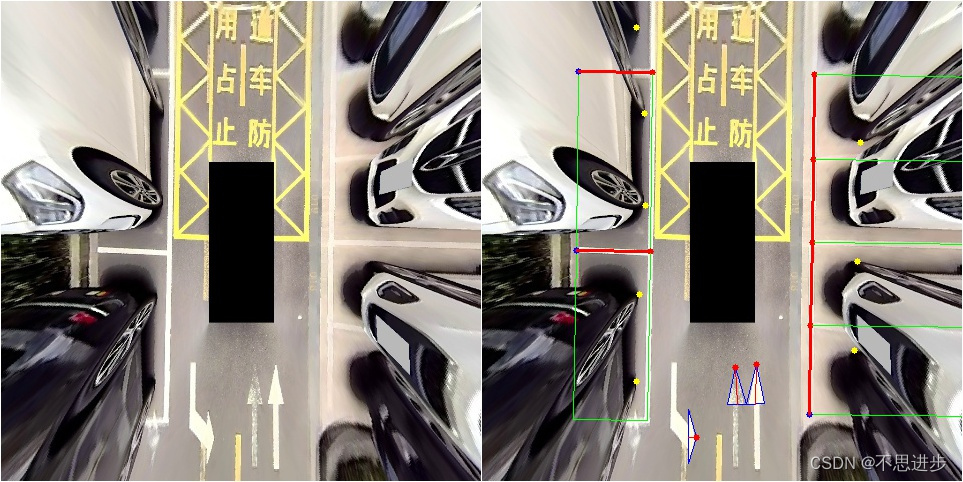
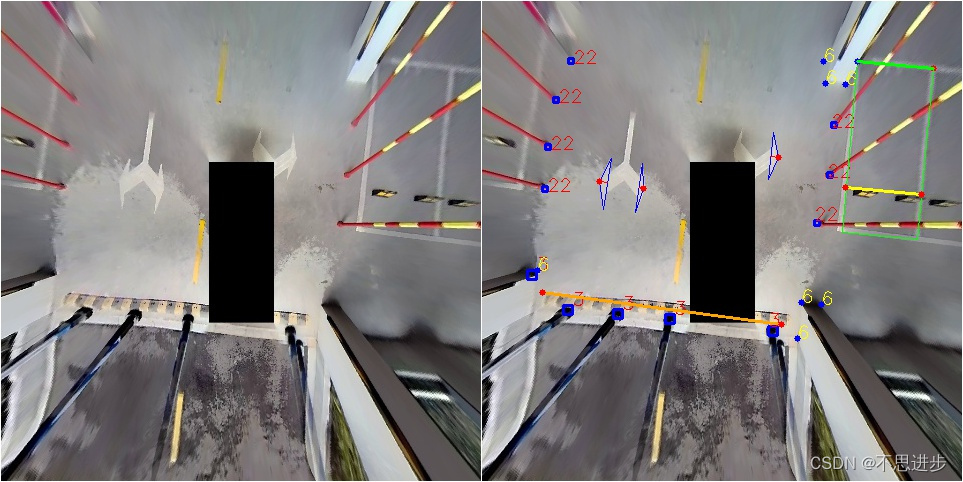
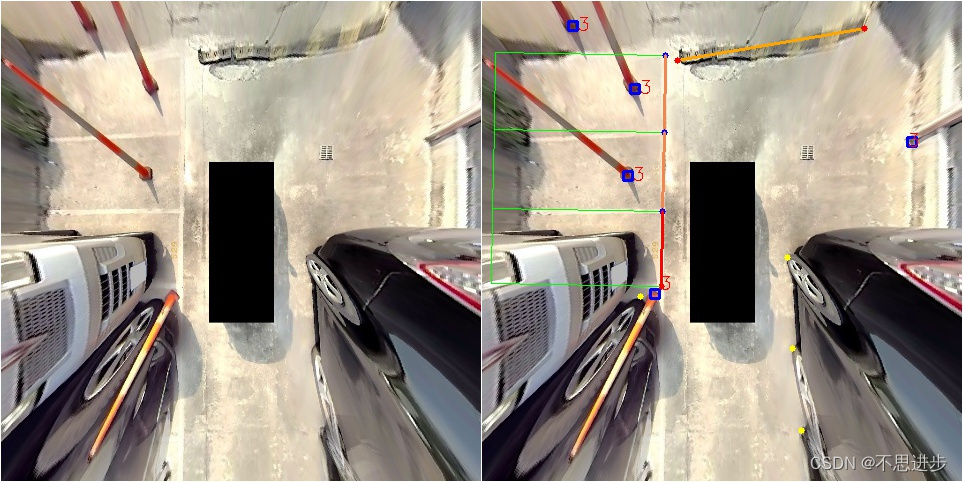
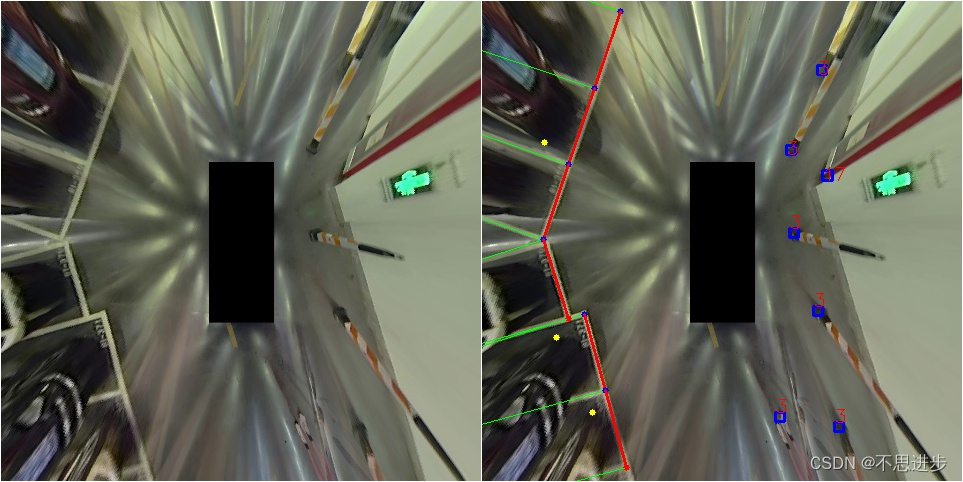
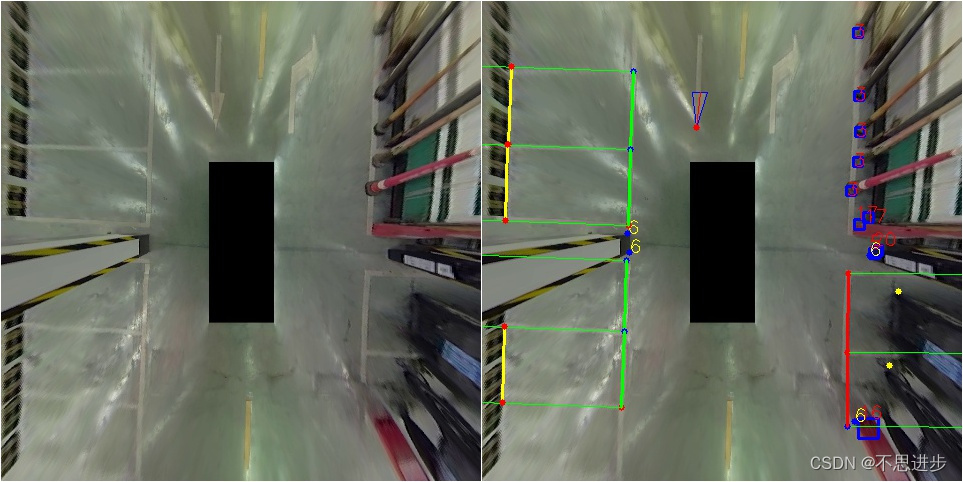
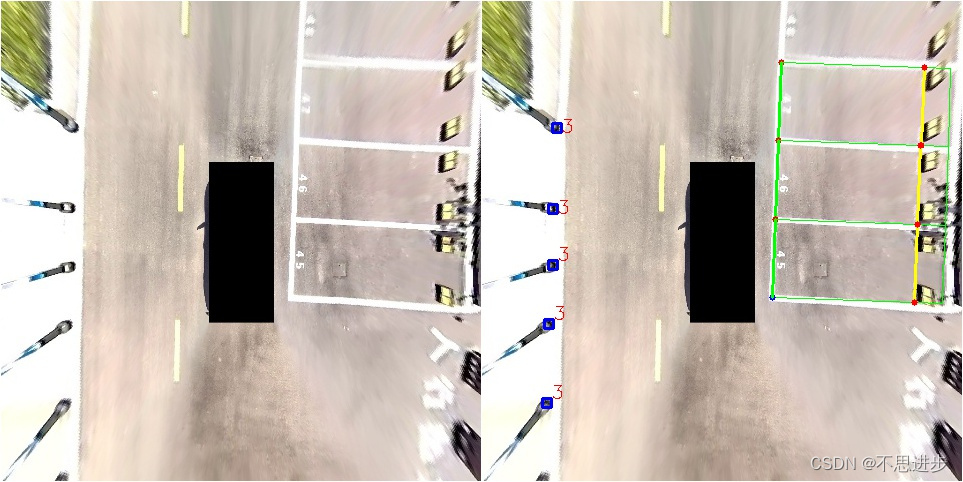
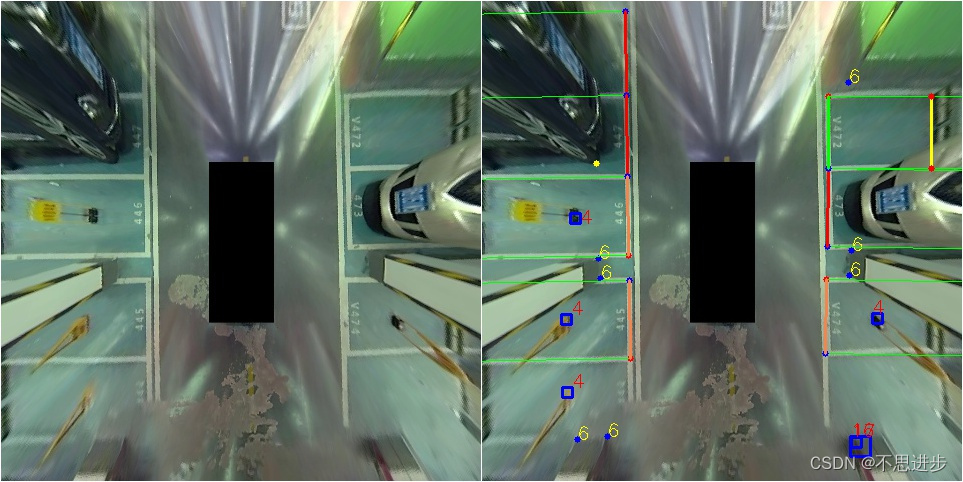
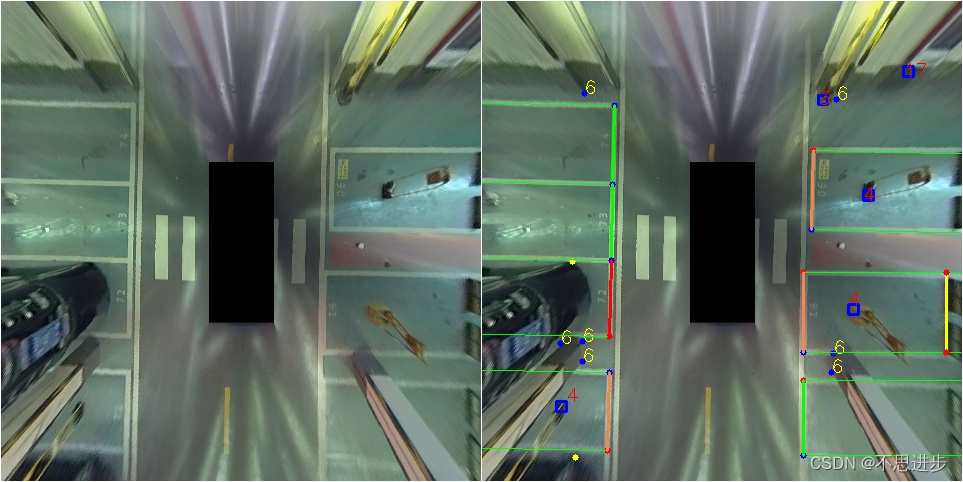
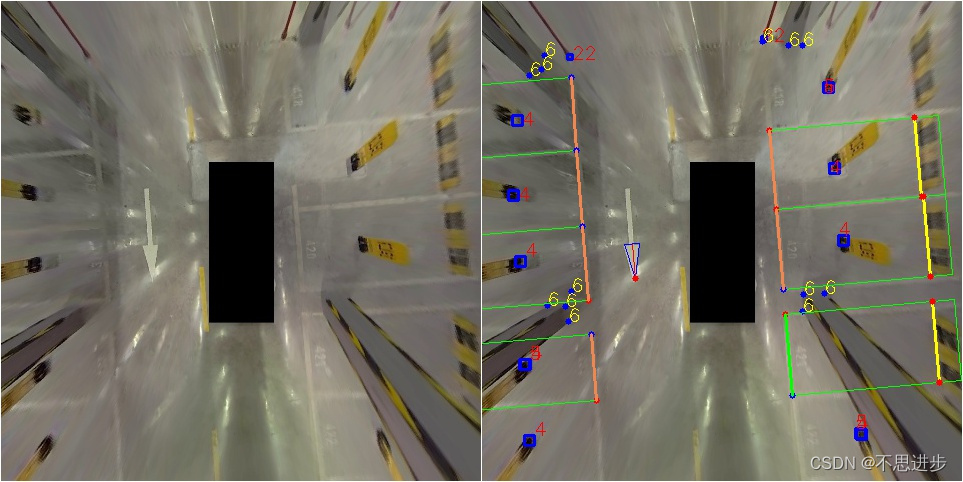
车位是由4条绿线组成的,如果4条线中有一条线出现如下颜色,则代表下面对应的意思
绿色:可泊 ; 红色:被车占用 ; 橙色:被碍物占用或被障碍物遮挡
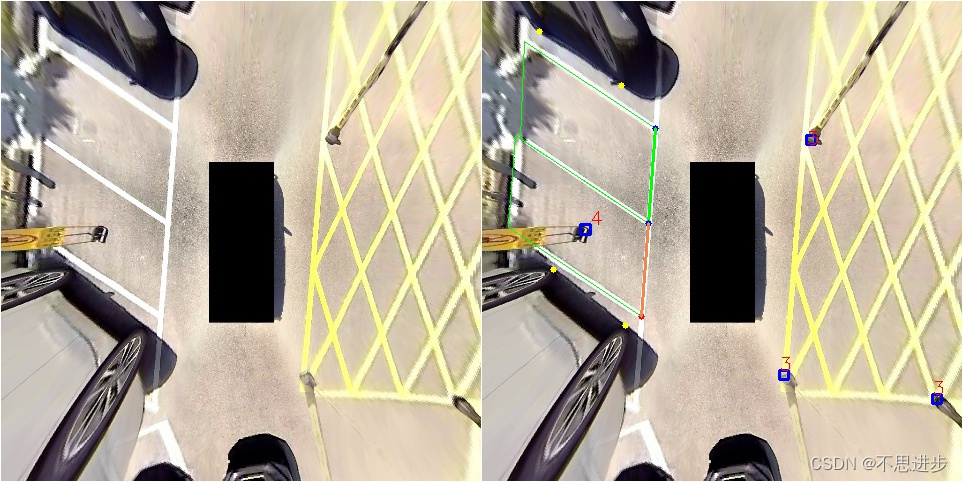
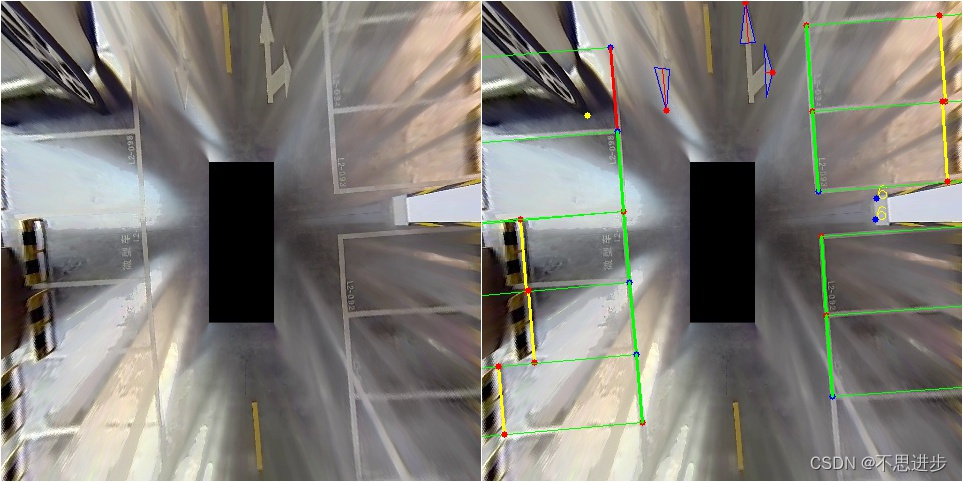
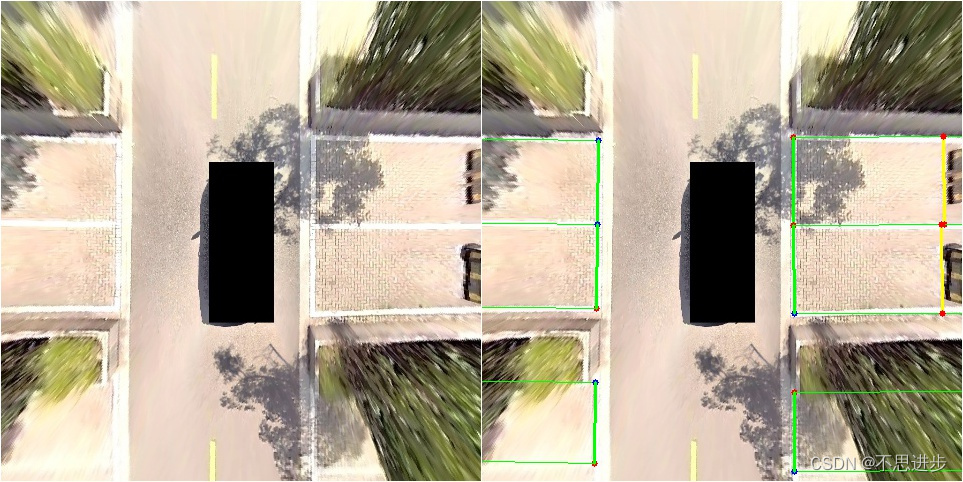
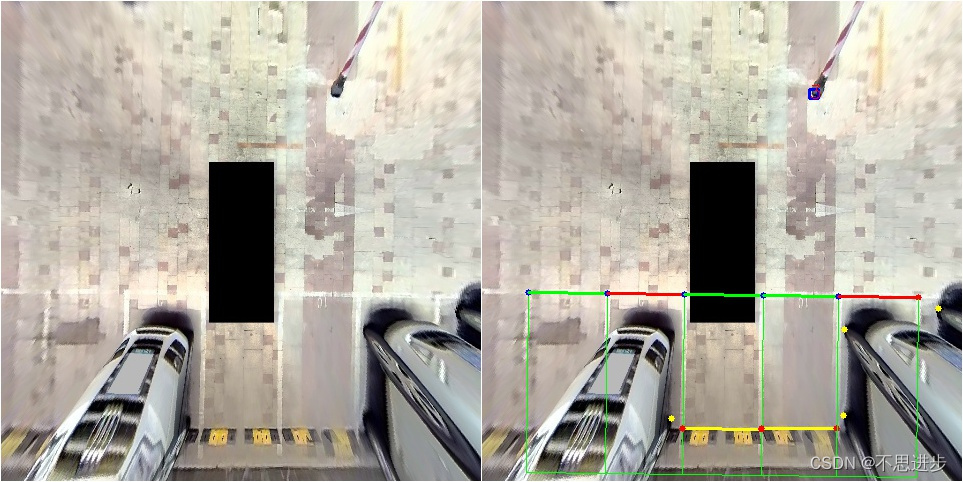
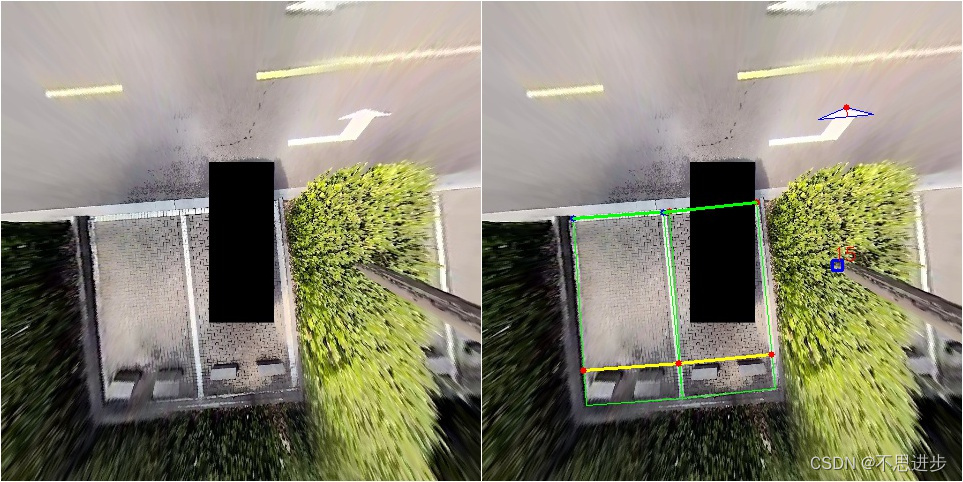
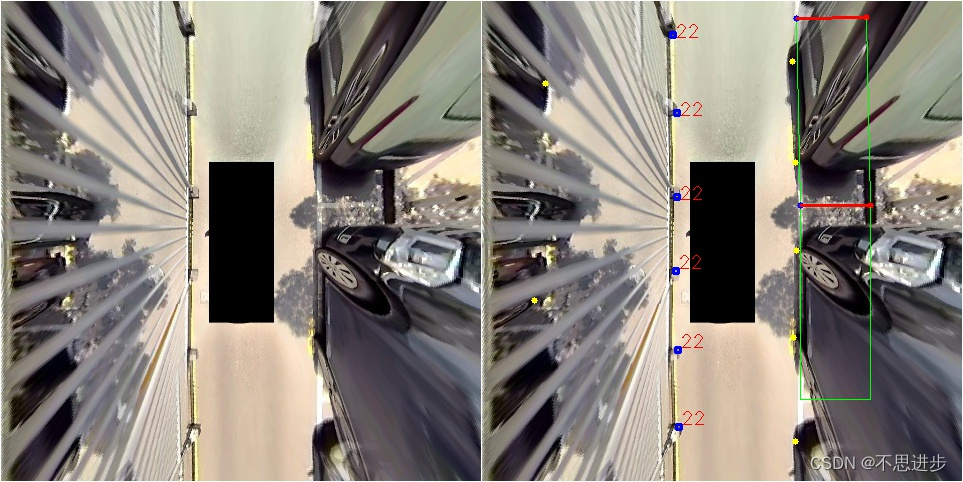
1.1、水平车位
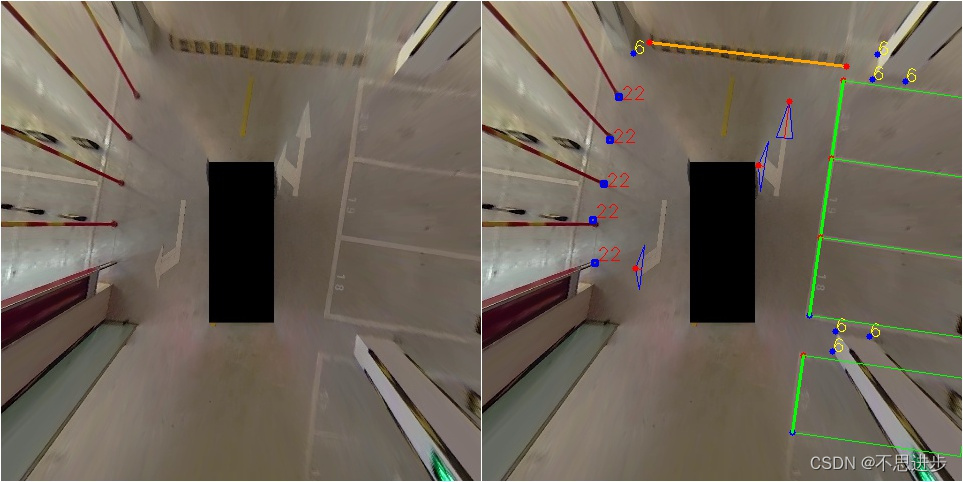
绿线组成的矩形框代表车位
1)靠路沿侧有车位线:则车位按照实际线给出
2)靠路沿侧无车位线:车位线会给到路沿与地面的交界处

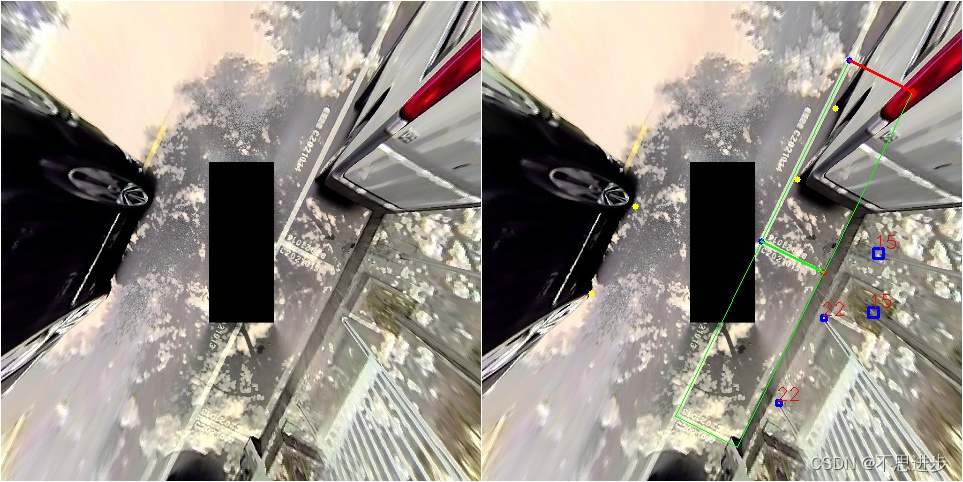
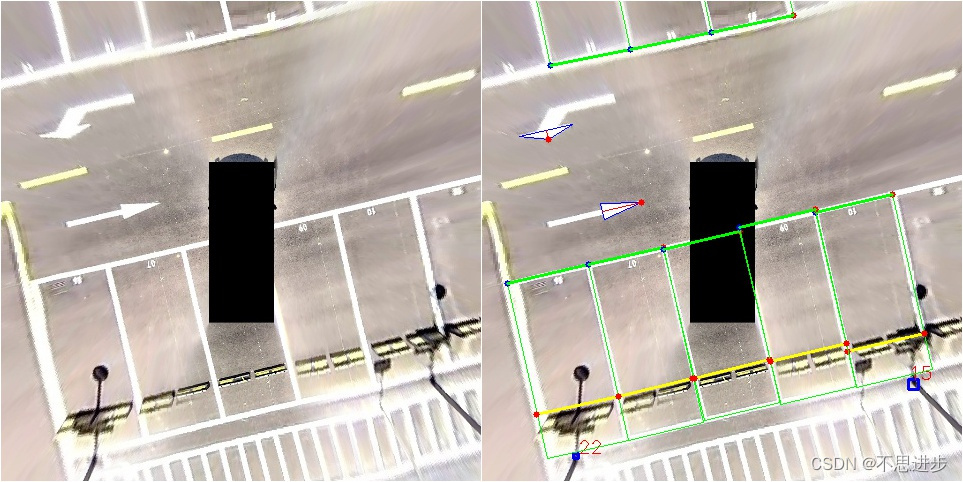
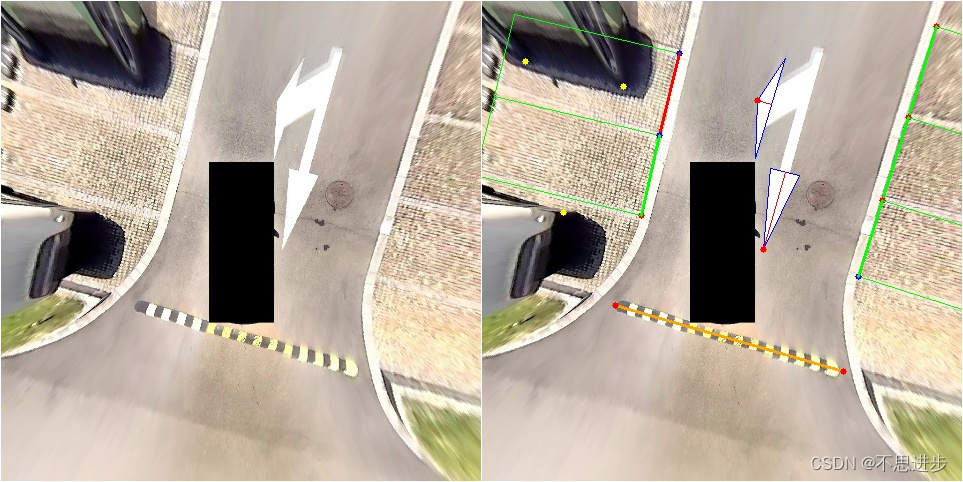
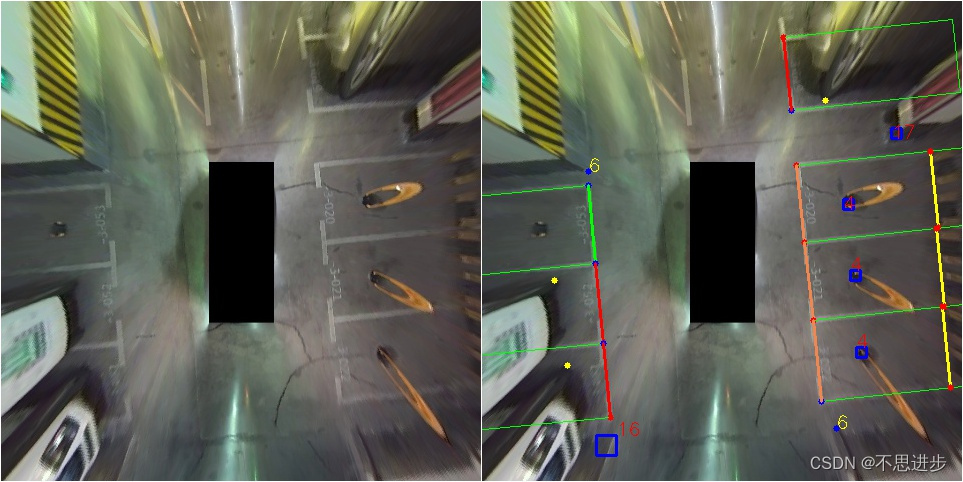
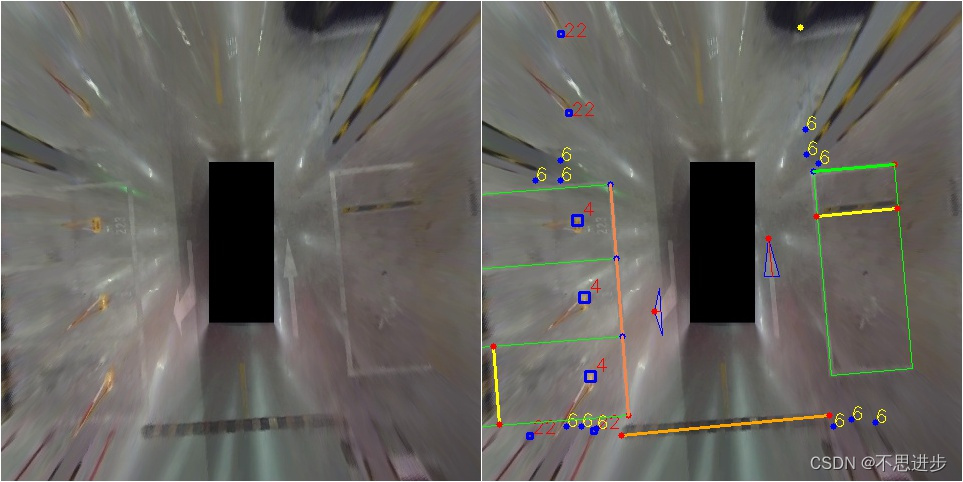
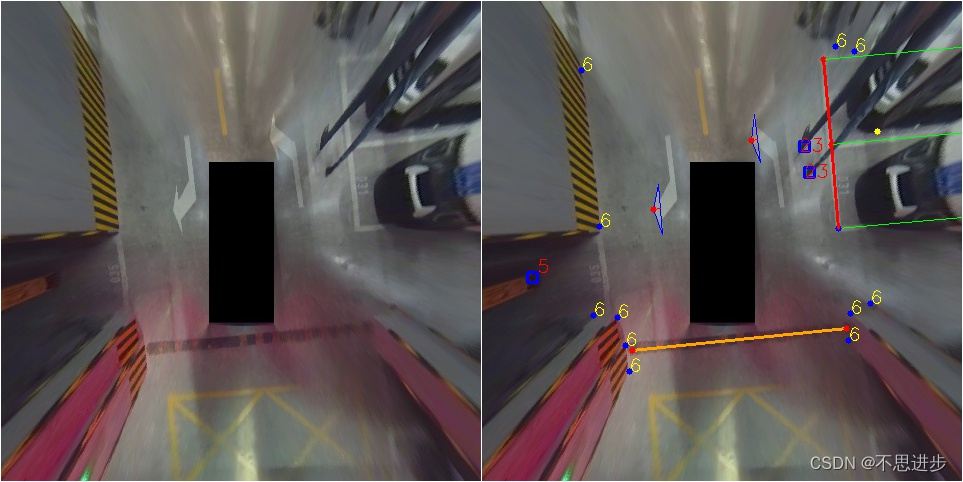
1.2、斜列车位
绿线组成的框代表车位,斜列车位数据集中也很少,就列举一张图吧,橙色入口线代表车位内有障碍物,并给出车位内障碍物的类型和位置坐标
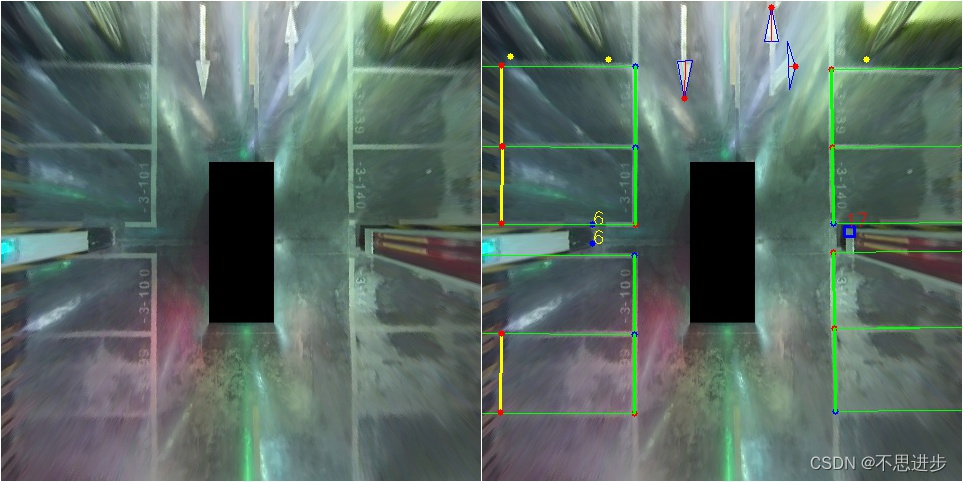
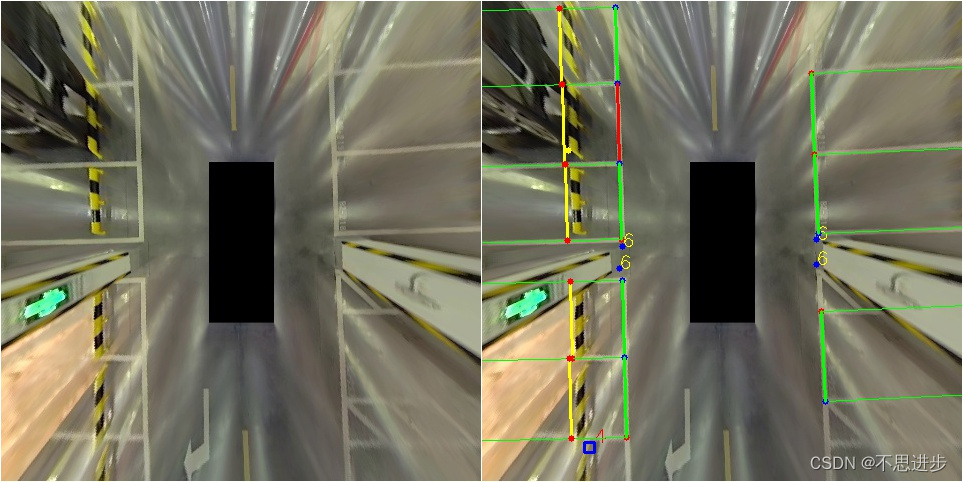
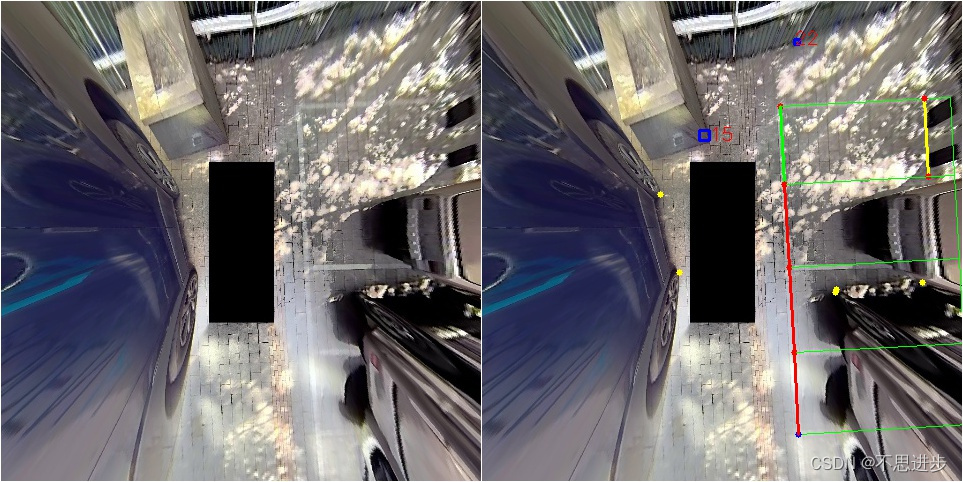
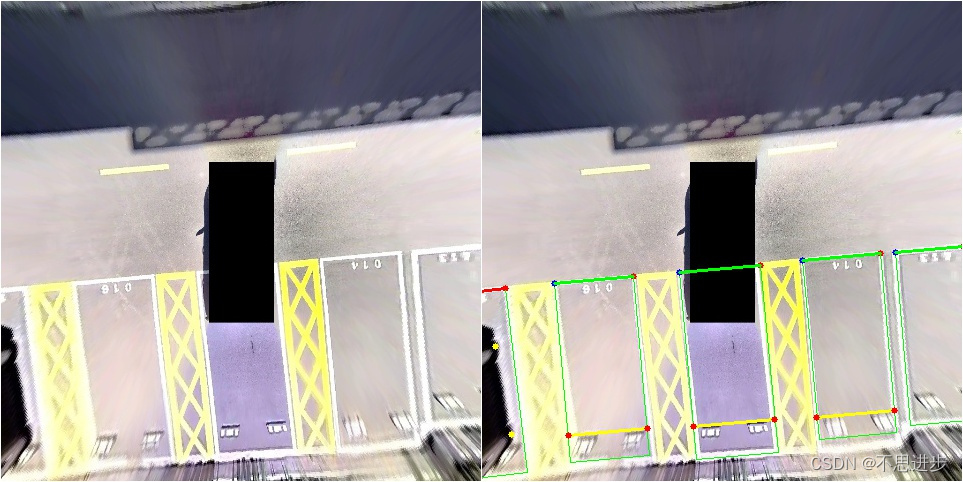
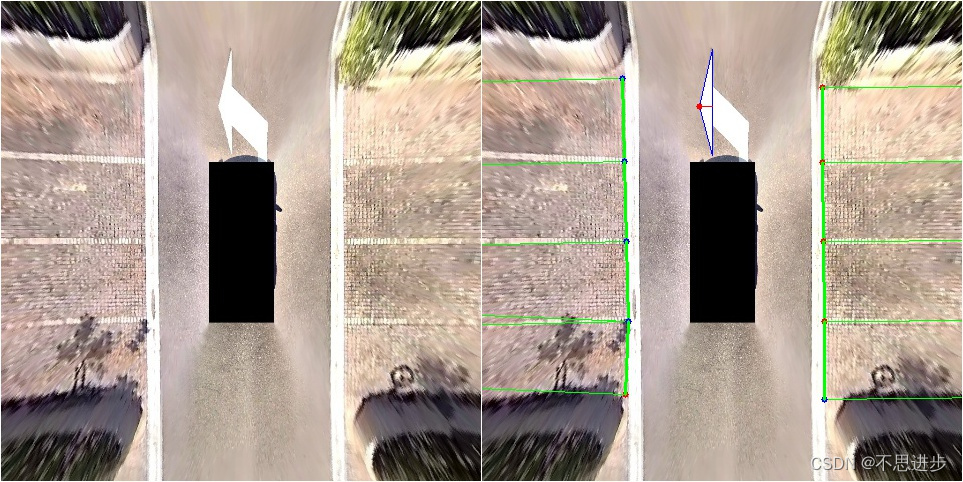
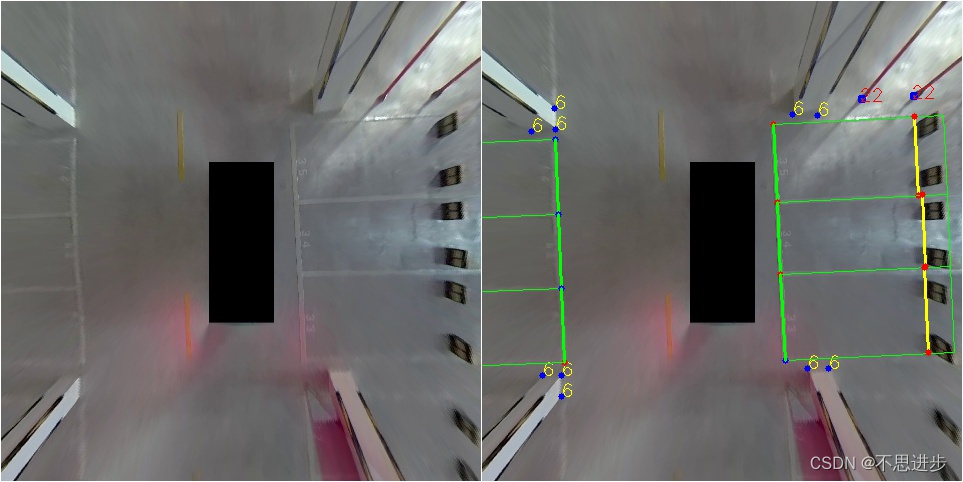
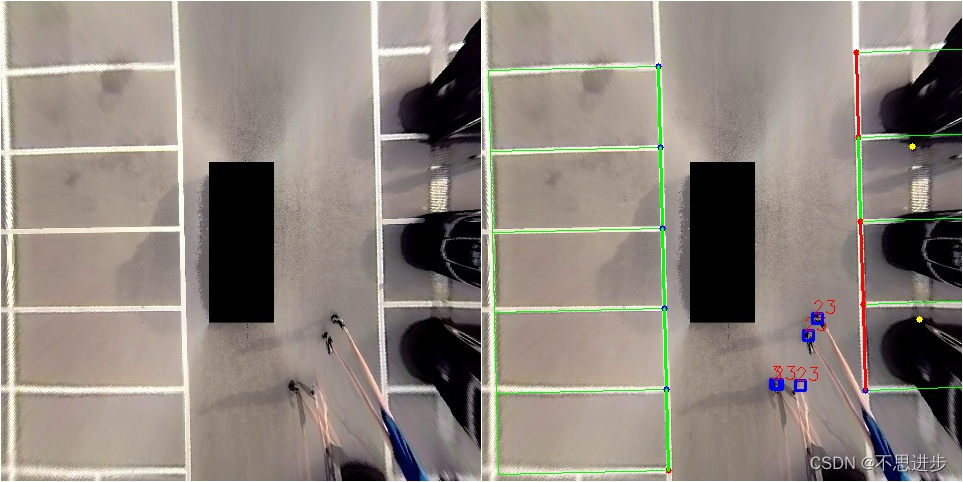
1.3、垂直车位
绿线组成的矩形框代表车位,列几个示例图如下,更多结果参考视频
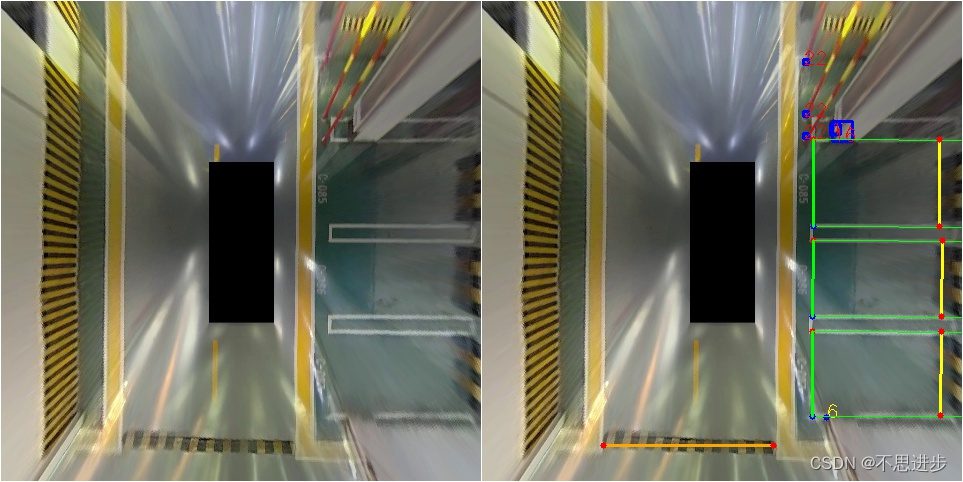

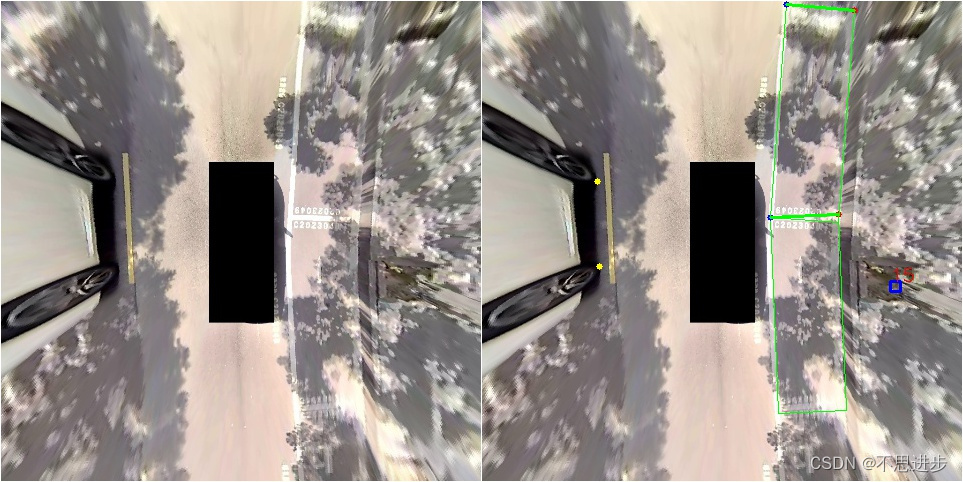
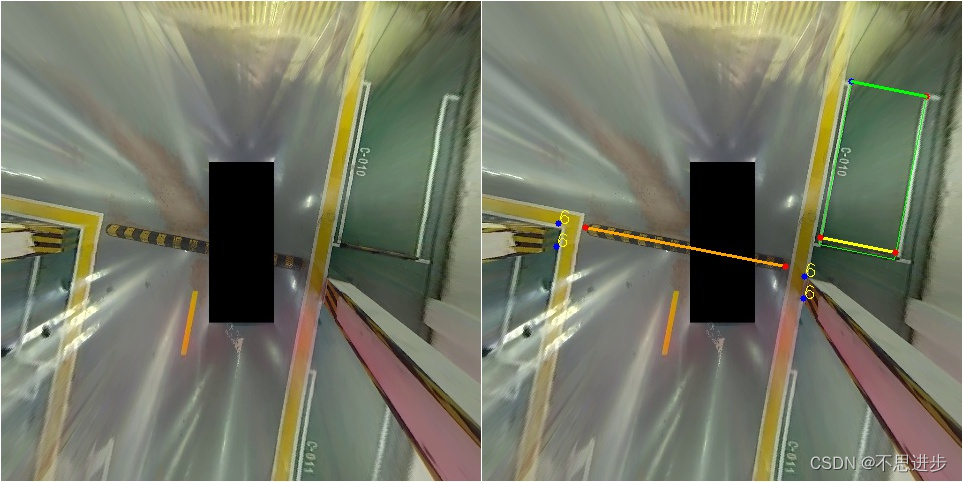
1.4、轮档、限位杆
给出的是轮档、限位杆离车位入口方向最近的接地位置。如下面图中黄色线(端点是红色原点),输出是黄线的两个端点,360度检测车位内的轮档和限位杆。
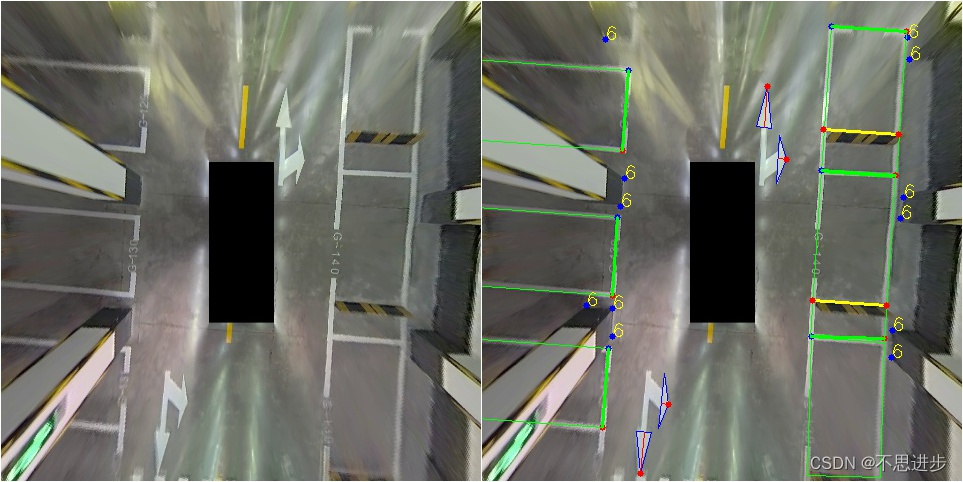
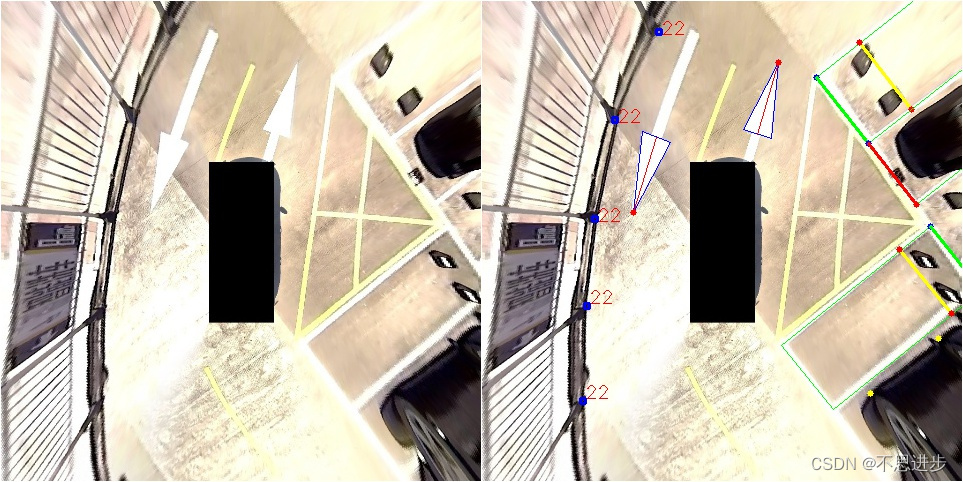
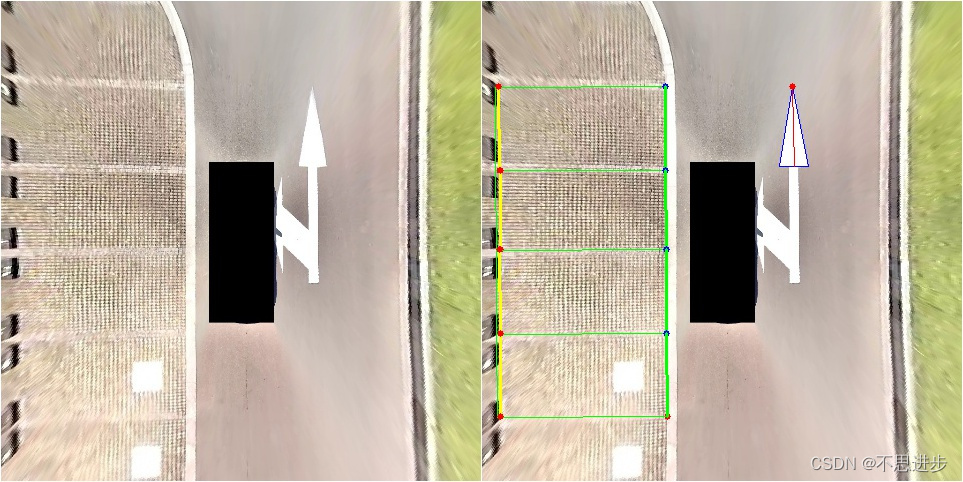
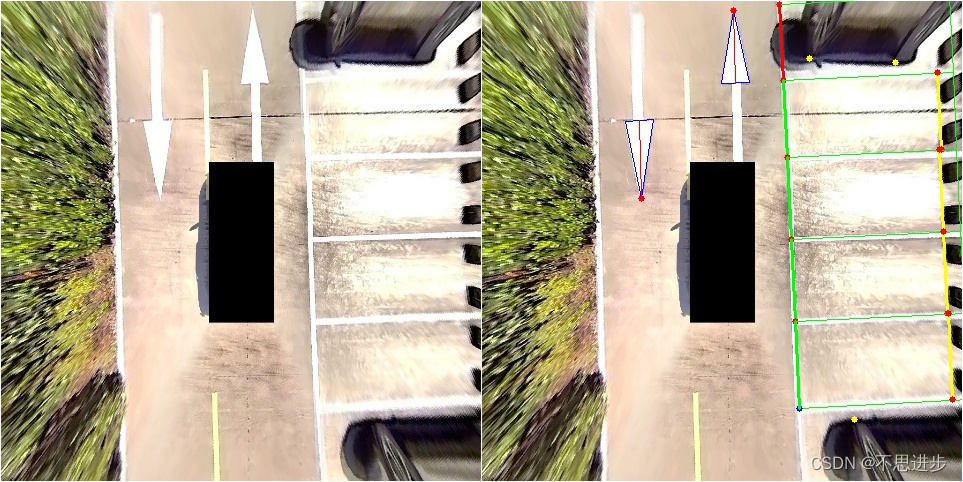
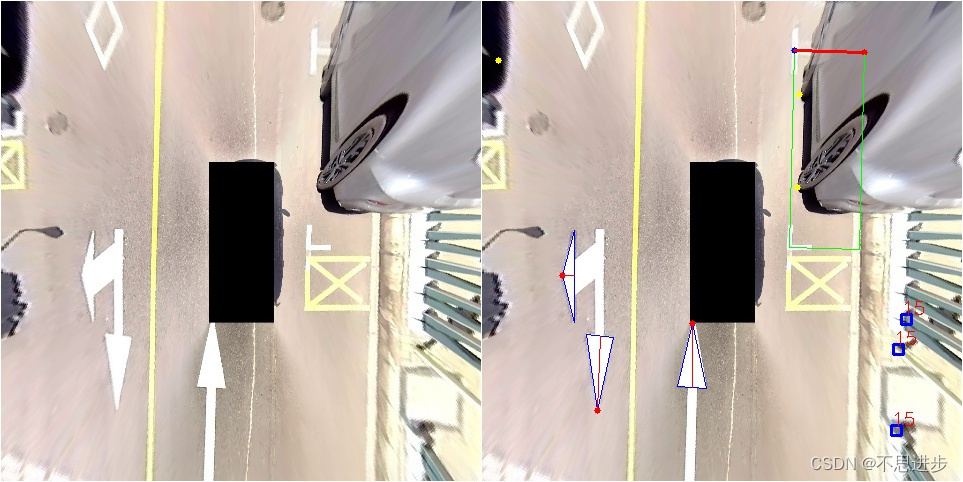
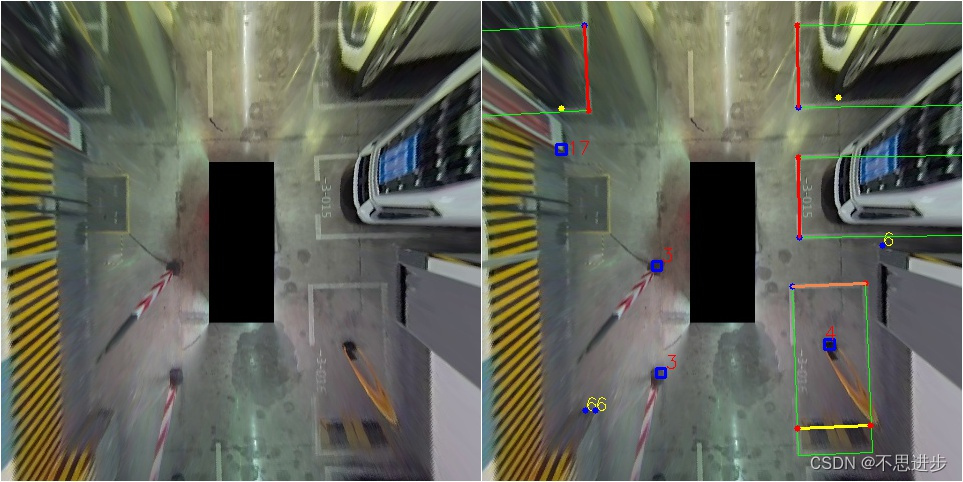
2、箭头、减速带
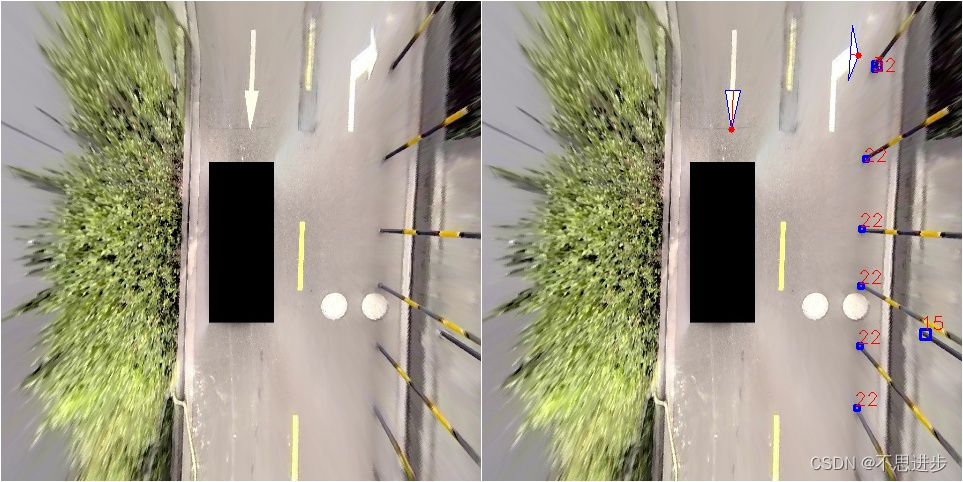
2.1、箭头
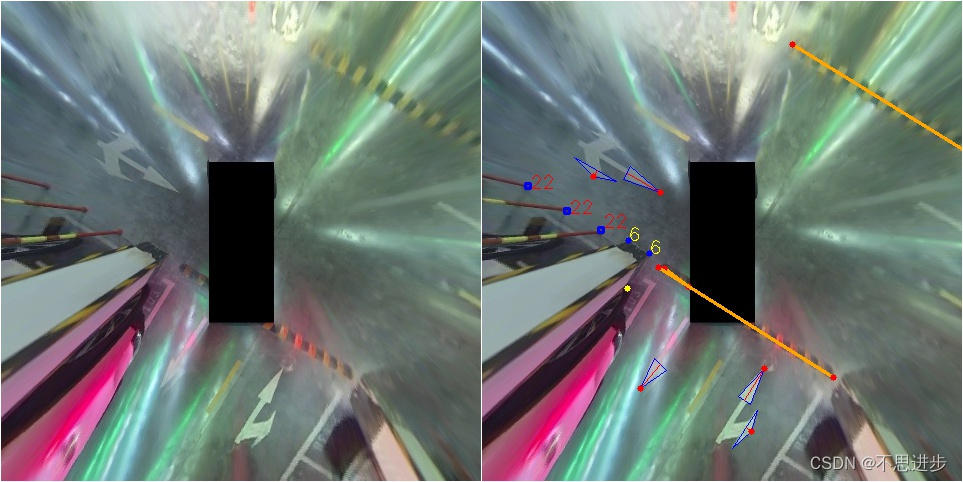
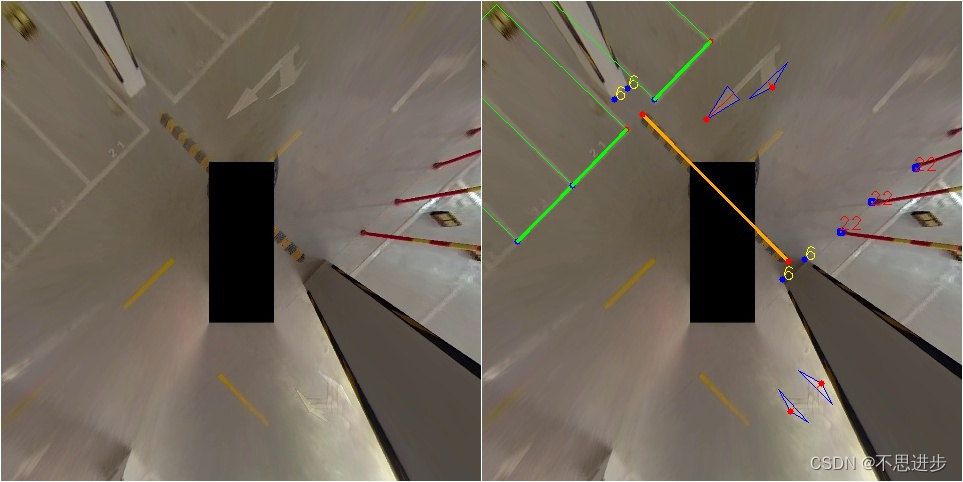
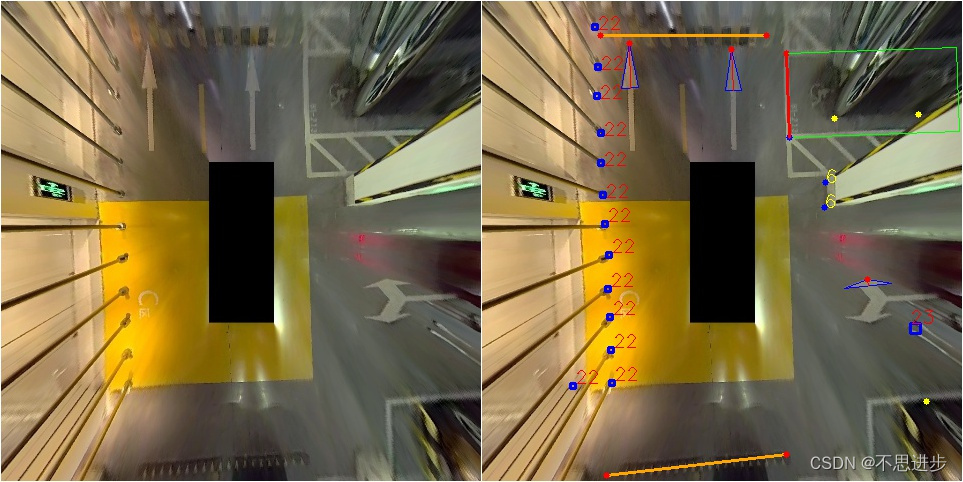
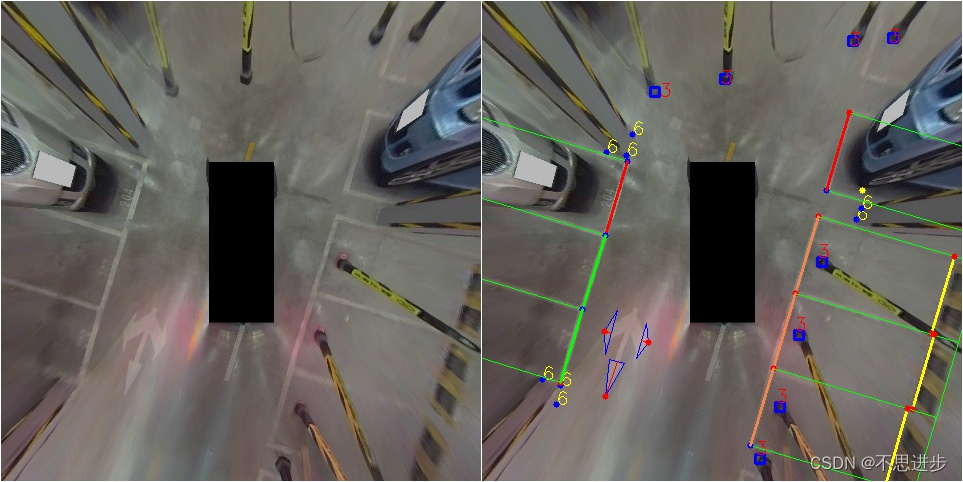
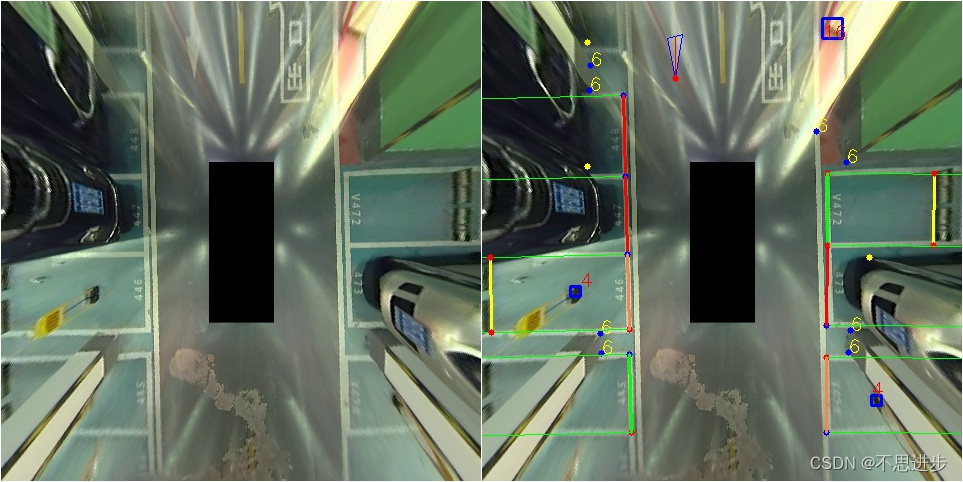
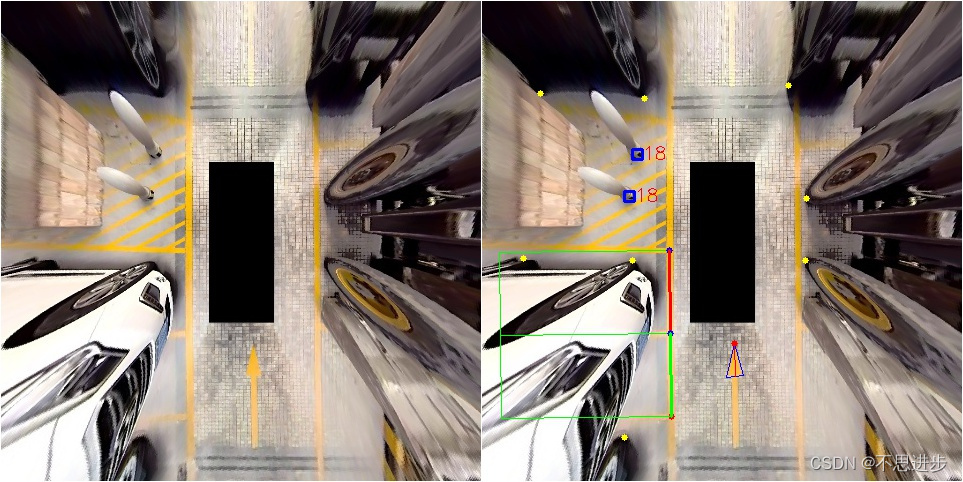
箭头给出方向向量,由2个点组成的线段表示,如下面图箭头里的红色线(圆点代表箭头方向)
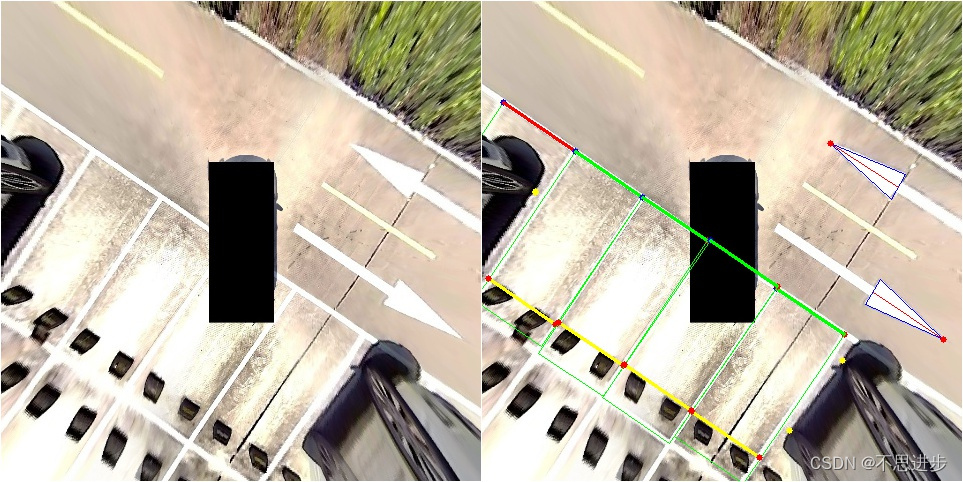
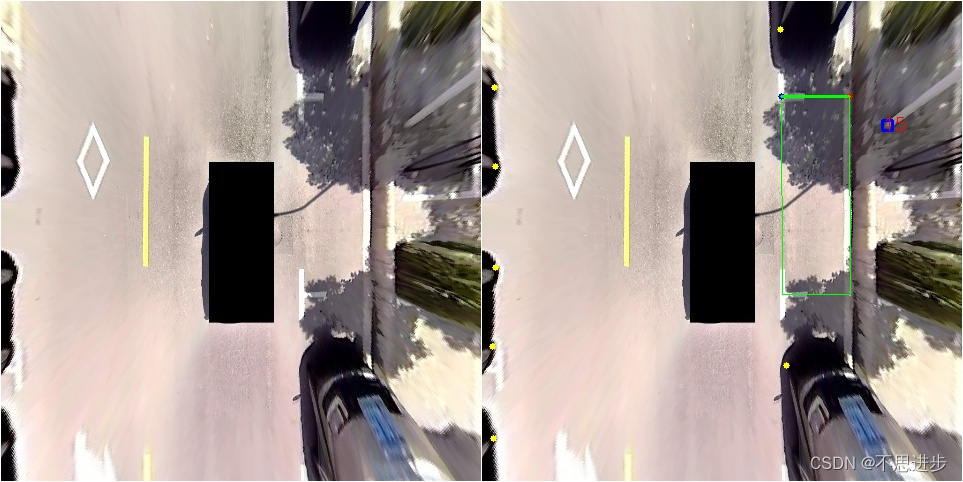
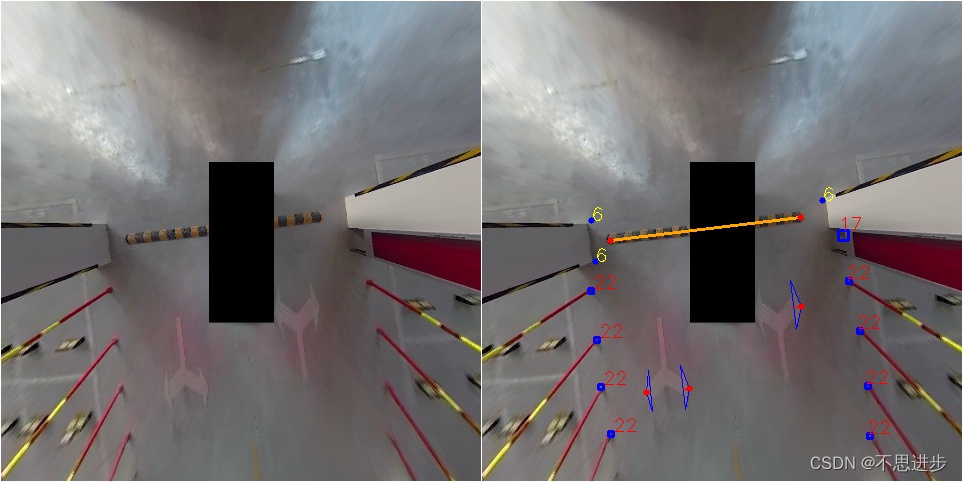
2.2、减速带
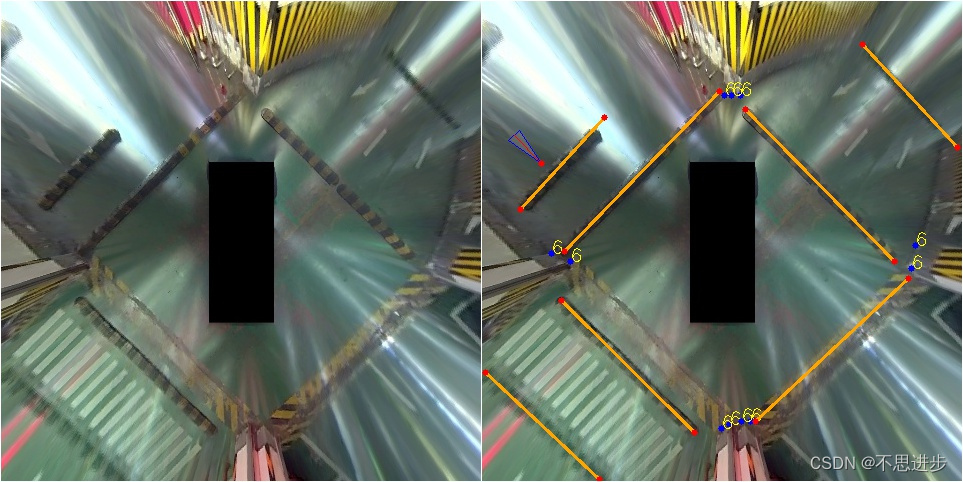
减速带给出中心线方向向量,由2个点组成的线段表示,如下面橙线(圆点代表减速带端点)
3、低矮障碍物
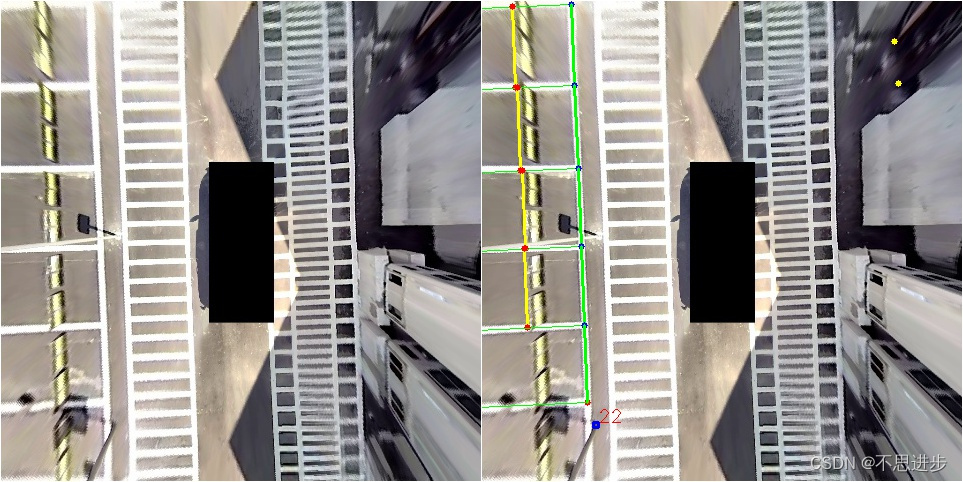
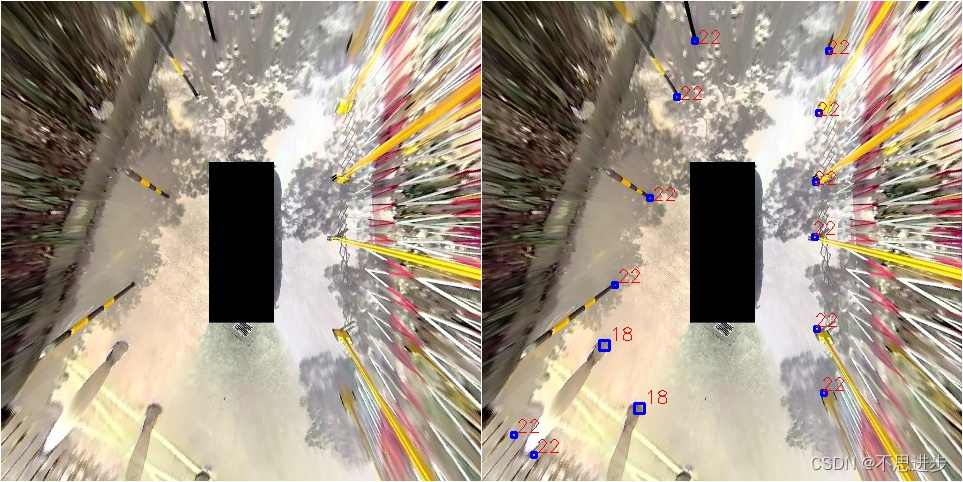
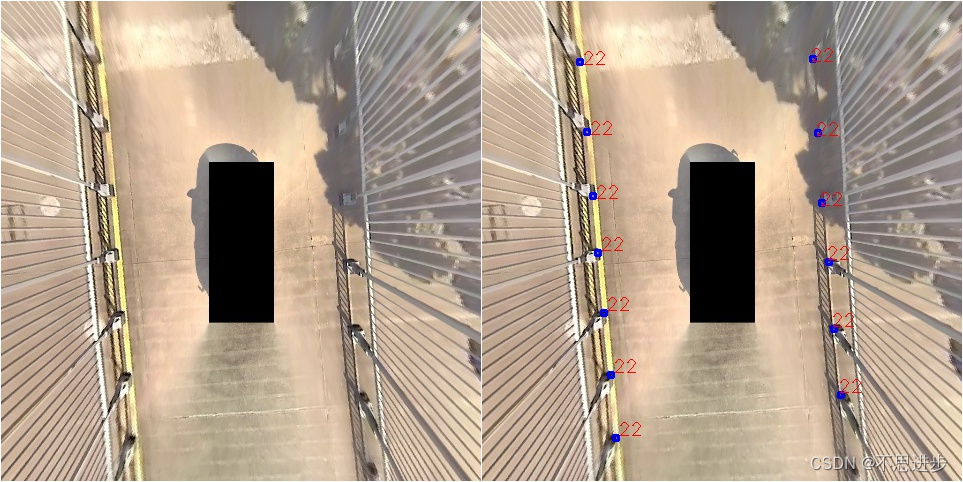
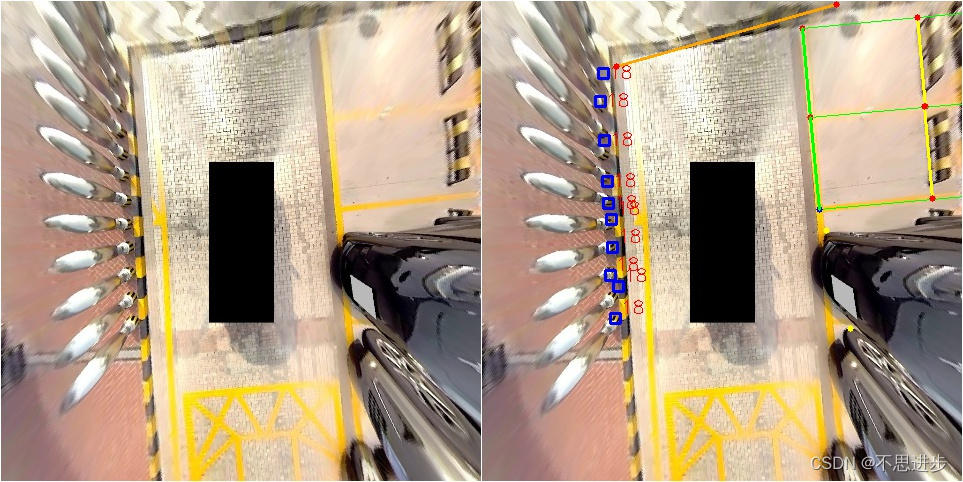
3.1、隔离柱、细杆
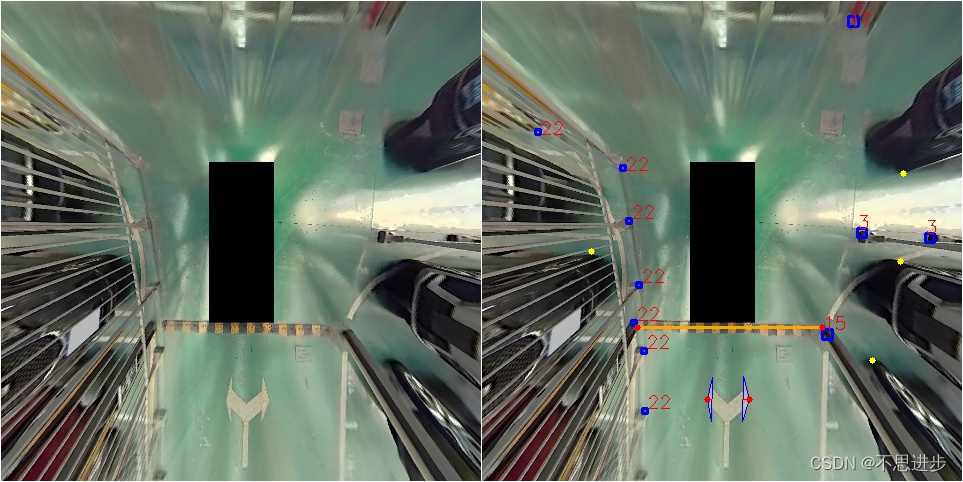
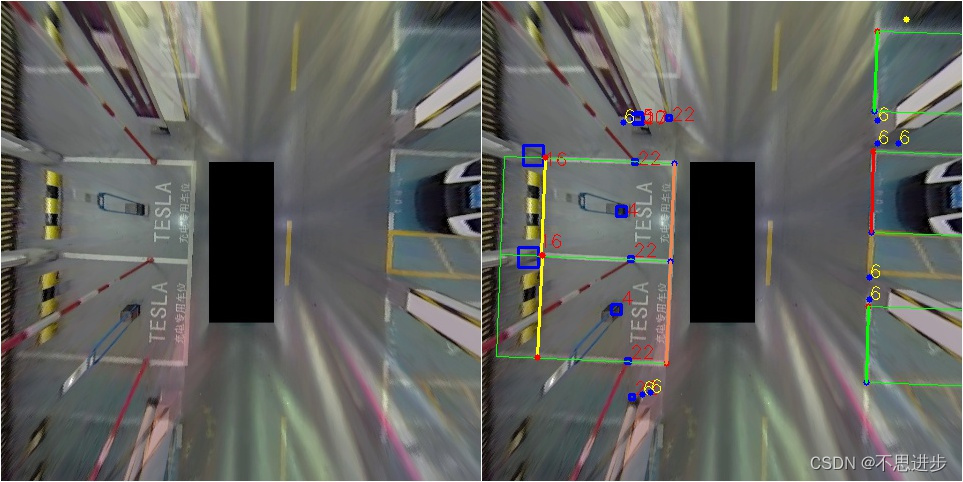
隔离柱、细杆示例如下图,红色序号22所指的蓝色矩形框即检测出的接地框,其中护栏的接地桩也算隔离柱类型

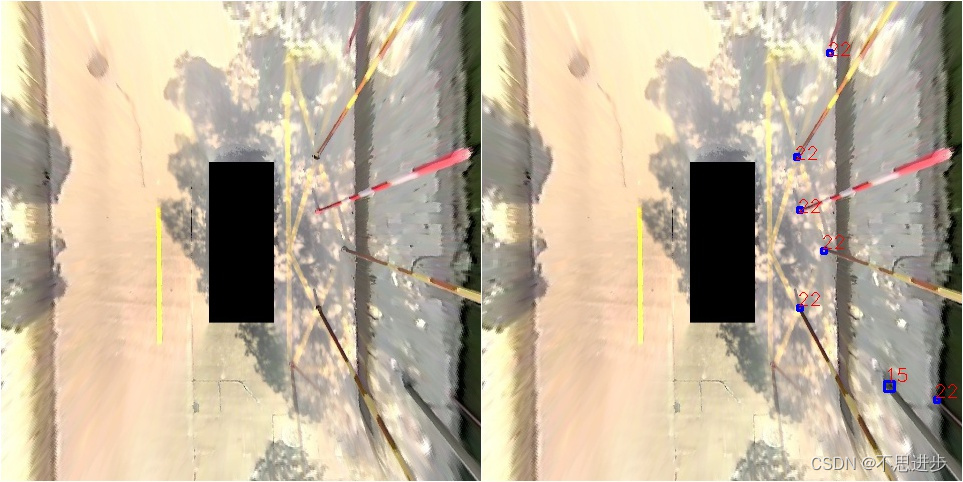
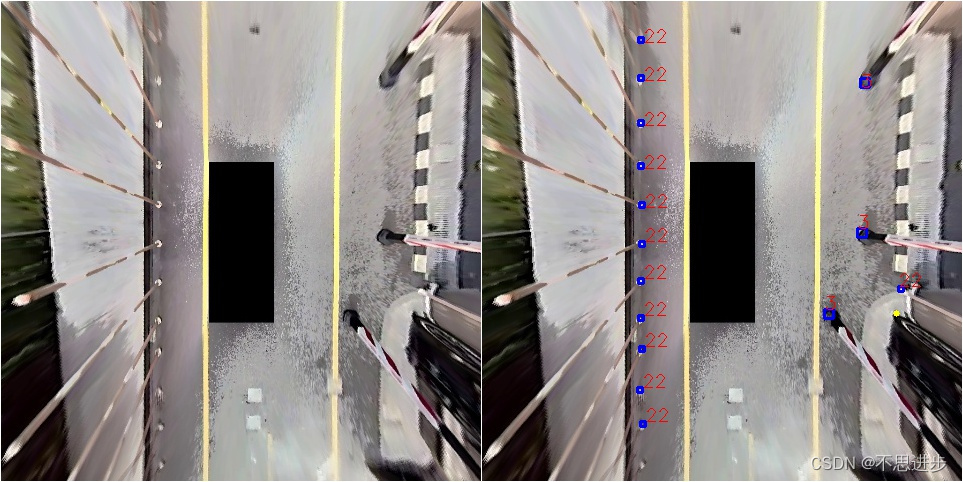
 如下图护栏的接地部分也是输出接地框,序号22
如下图护栏的接地部分也是输出接地框,序号22
3.2、雪糕筒
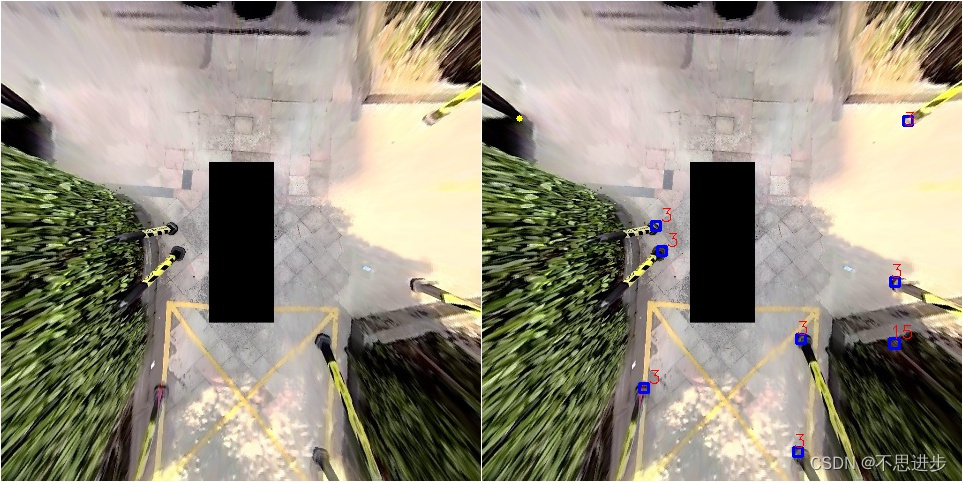
雪糕筒例如下图,红色序号3所指的蓝色矩形框即检测出的接地框


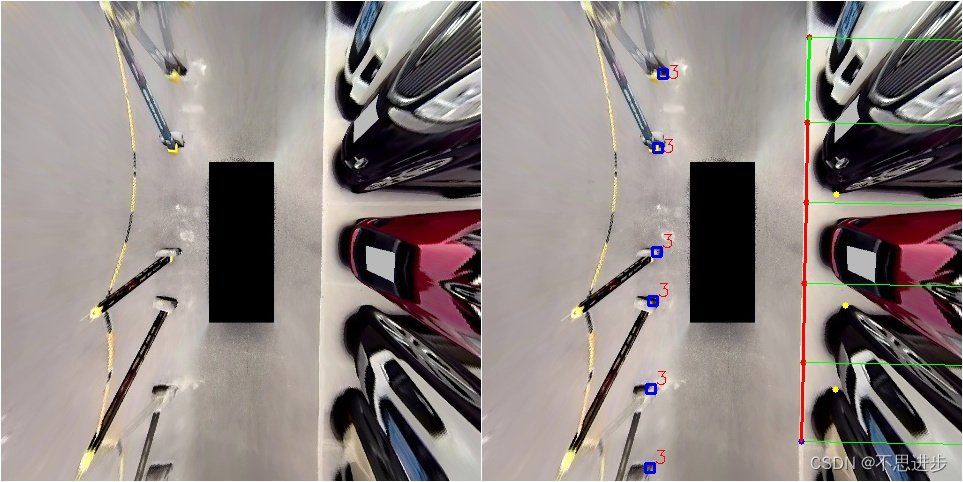
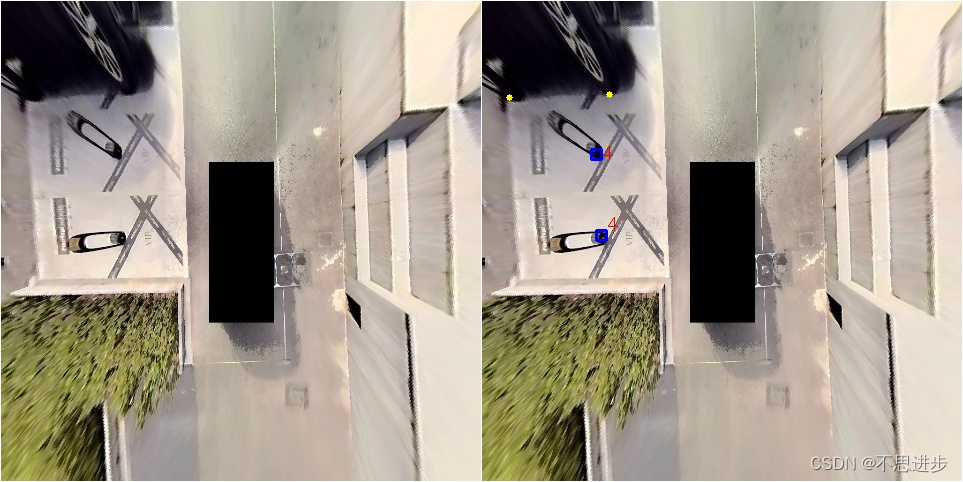
3.3、地锁
地锁给出的接地框不是完全包围地锁的底部,而是以障碍物离自车左右摄像头最近的那个点为准,画出的矩形框,基本代表了地锁的接地位置,地锁示例如下图

下面图中红色序号4 所指的蓝色矩形框即检测出的地锁的接地框,数据集中出现过的地锁基本都能正确识别类型和位置
3.4、地库防撞条的接地点
下图中黄色序号6所指的蓝色接地点,即为检测出的防撞条的接地点
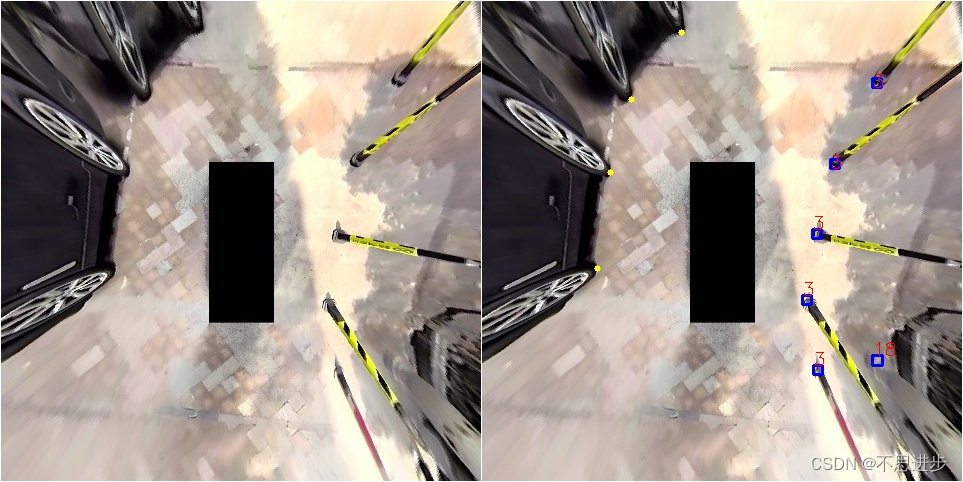
3.5、车轮接地点
轮胎与地面交界处的黄色的圆点,即为检测出的轮胎的接地点
3.6、人脚接地框
下图红色序号23所指的蓝色矩形框为检测的人脚的接地框
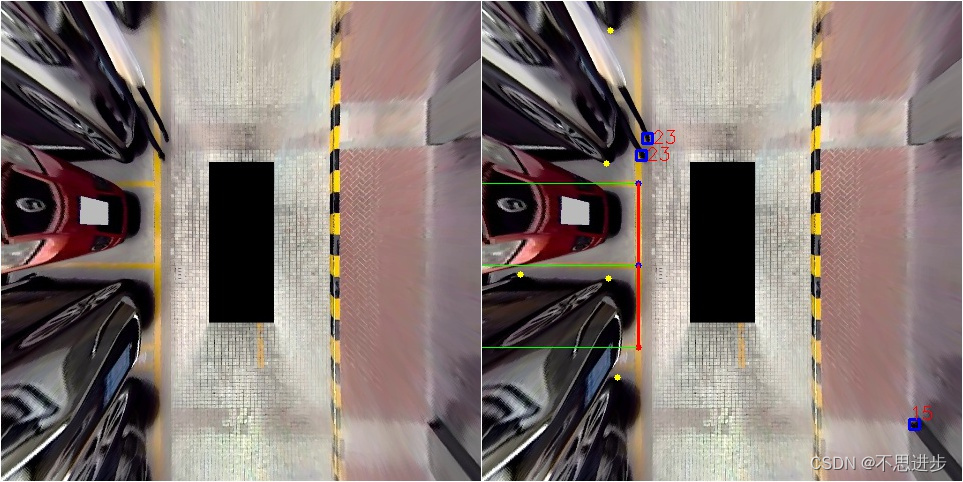 3.7、石球
3.7、石球
下图红色序号18所指的蓝色矩形框为石球的接地框

先列这些类别吧,别的先不列了
本文使用的所有图片均来自以下链接,如有侵权,即刻删除博登智能开源AVM(Around View Monitor)环视拼接泊车位数据集 - 知乎 (zhihu.com)d![]() https://zhuanlan.zhihu.com/p/564718292?utm_id=0
https://zhuanlan.zhihu.com/p/564718292?utm_id=0
这篇关于基于yolov5的目标检测-停车位检测、低矮障碍物、地面标识检测等的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









![[数据集][目标检测]血细胞检测数据集VOC+YOLO格式2757张4类别](https://i-blog.csdnimg.cn/direct/22c867ab717d44c78b985ed667169b42.png)