本文主要是介绍STM32F103C8T6 HC-SR04超声波模块——超声波障碍物测距(HAl库),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
超声波障碍物测距
- 一、HC-SR04超声波模块
- (一)什么是HC-SR04?
- (二)HC-SR04工作原理
- (三)如何使用HC-SR04
- (四)注意事项
- 二、程序编写
- (一)CubeMX配置
- 1.芯片选择
- 2.配置RCC、SYS、时钟树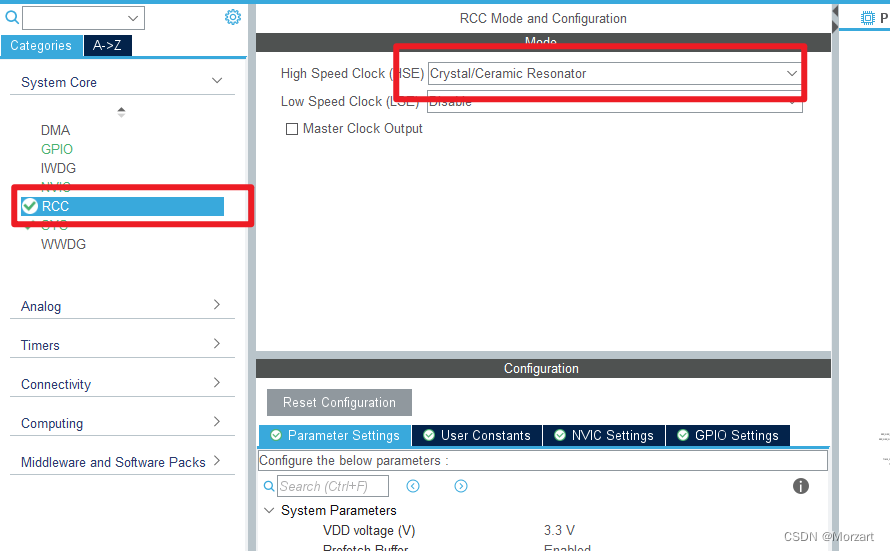
- 3.配置GPIO
- 4.配置串口1
- 5.配置定时器
- 6.开启定时器中断
- 7.设置路径、生成代码工程
- (二)代码编写
- 三、效果展示
- 四、总结
- 五、引用
使用的软硬件设备与应用:
- 硬件:STM32F103C8T6、HC-SR04、LED灯
- 软件:Keil5、CubeMX、串口助手
一、HC-SR04超声波模块
(一)什么是HC-SR04?
HC-SR04是一款常用的超声波测距模块,它能够通过发送超声波脉冲并接收其回波来测量物体与传感器之间的距离。这种模块广泛应用于机器人、智能小车、智能家居等领域,可以用于测量墙壁距离、障碍物距离、物品距离。
(二)HC-SR04工作原理
HC-SR04模块的工作原理是,通过IO口TRIG触发测距,给至少10us的高电平信号,模块自动发送8个40kHz的方波,并自动检测是否有信号返回。如果有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间即为超声波从发射到返回的时间。通过测量这个时间,可以计算出距离,公式为:测试距离 = (高电平时间 × 声速(340m/s)) / 2。
(三)如何使用HC-SR04
模块的电气连接通常包括四个引脚:VCC、Trig、Echo、GND。VCC和GND分别为正负电源引脚,Trig为触发引脚,Echo为回波引脚。在使用时,需要给Trig引脚发送一个10us以上的高电平信号,然后在Echo引脚等待高电平输出,当Echo引脚变为低电平时,读取定时器的值,即为此次测距的时间。
(四)注意事项
- 不宜带电连接模块,如果要带电连接,则先让模块的GND端先连接,否则会影响模块工作。
- 测距时,被测物体的面积不少于0.5平方米且要尽量平整,否则会影响测试结果。
- HC-SR04模块的典型工作电压为5V,静态工作电流小于2mA,感应角度不大于15度,探测距离为2cm-400cm,精度可达0.3cm,存在一个2cm的盲区。2020版本的HC-SR04支持GPIO、UART和IIC三种模式接口,工作电压3-5.5V,测量范围2cm-450cm。
二、程序编写
(一)CubeMX配置
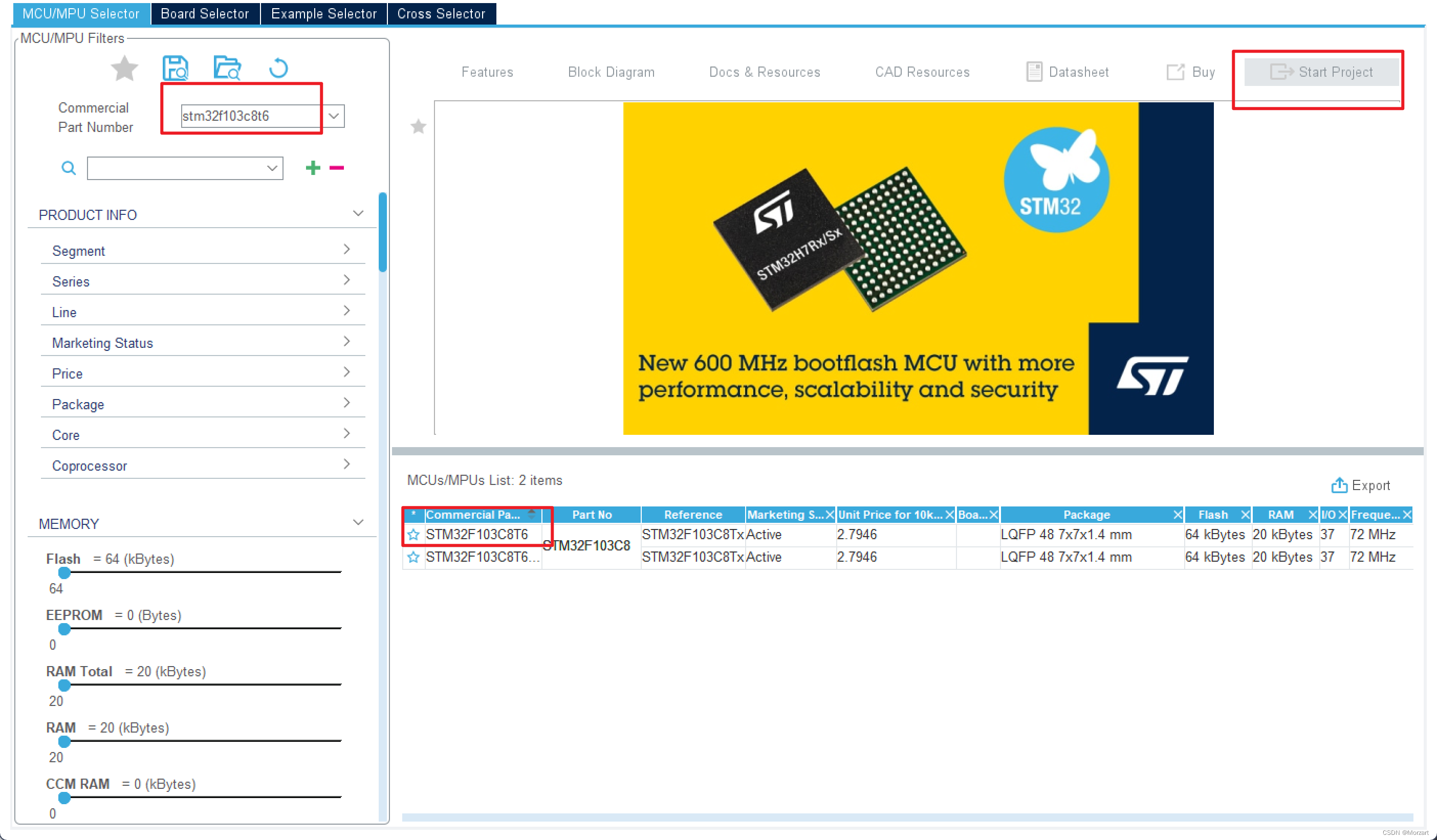
1.芯片选择
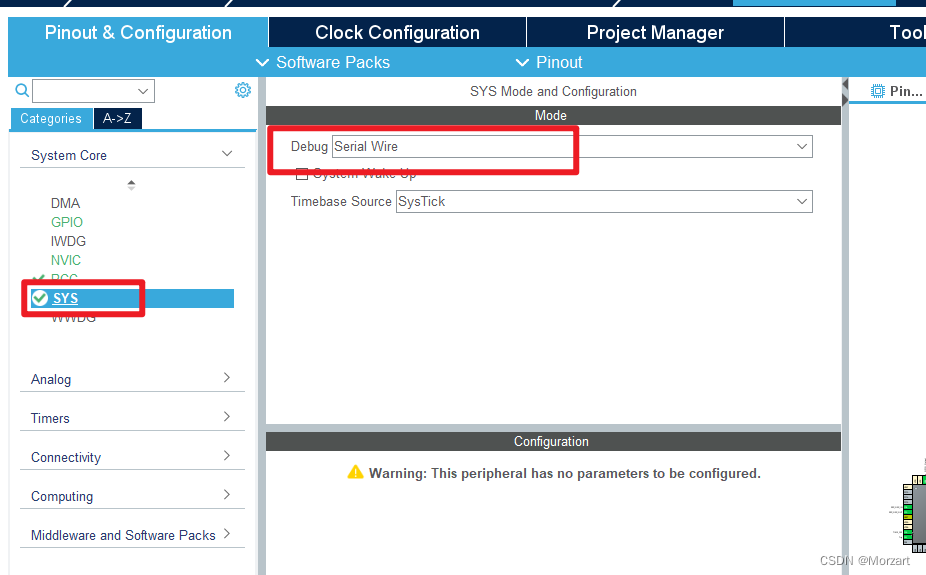
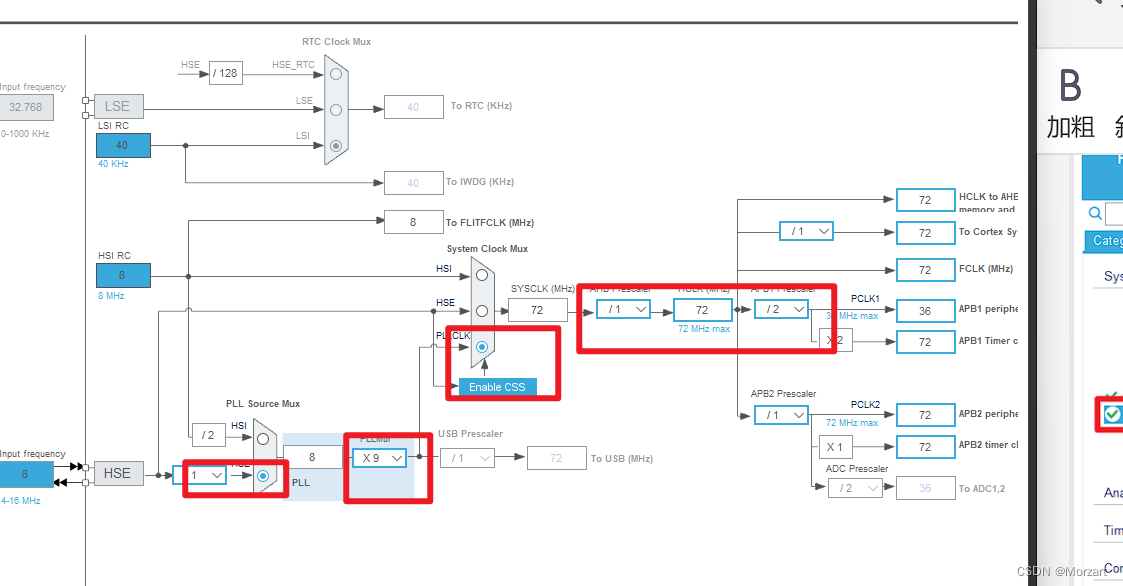
2.配置RCC、SYS、时钟树
3.配置GPIO
A1连接的是ECHO,B9为LED

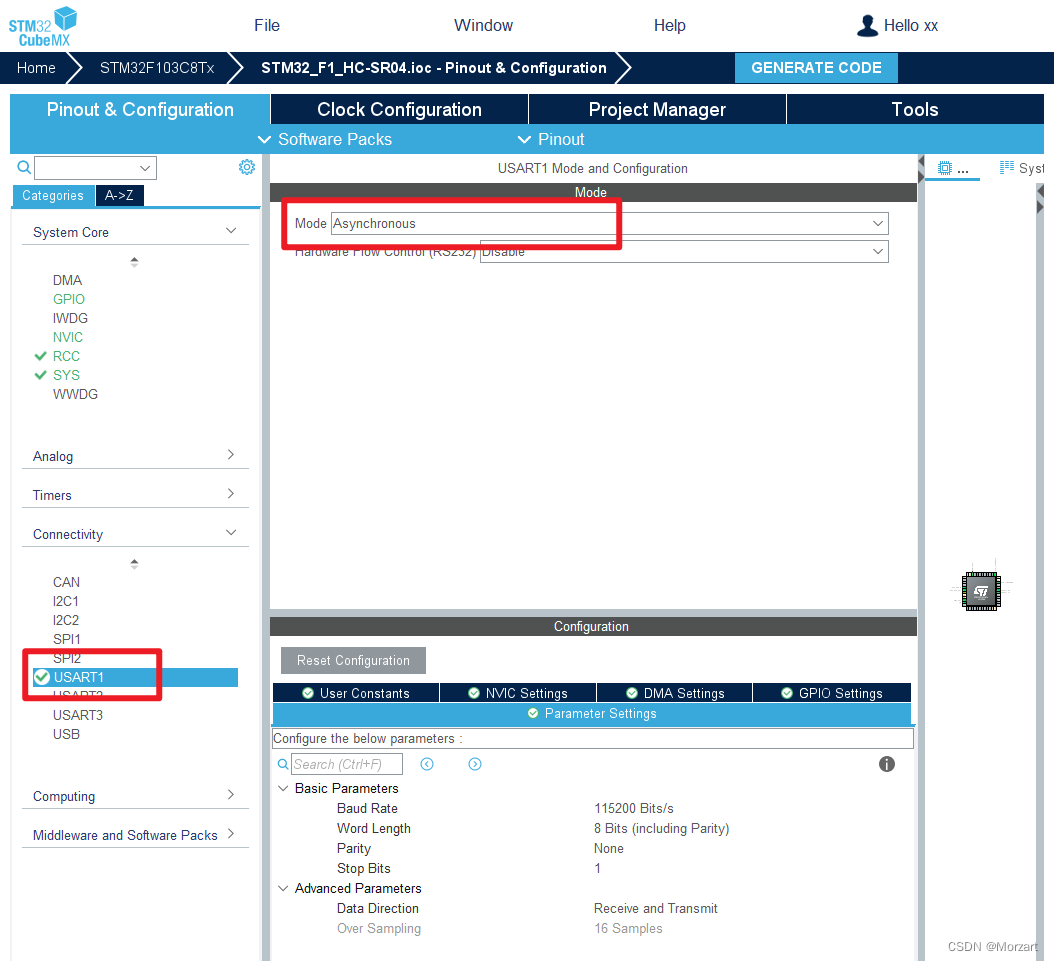
4.配置串口1
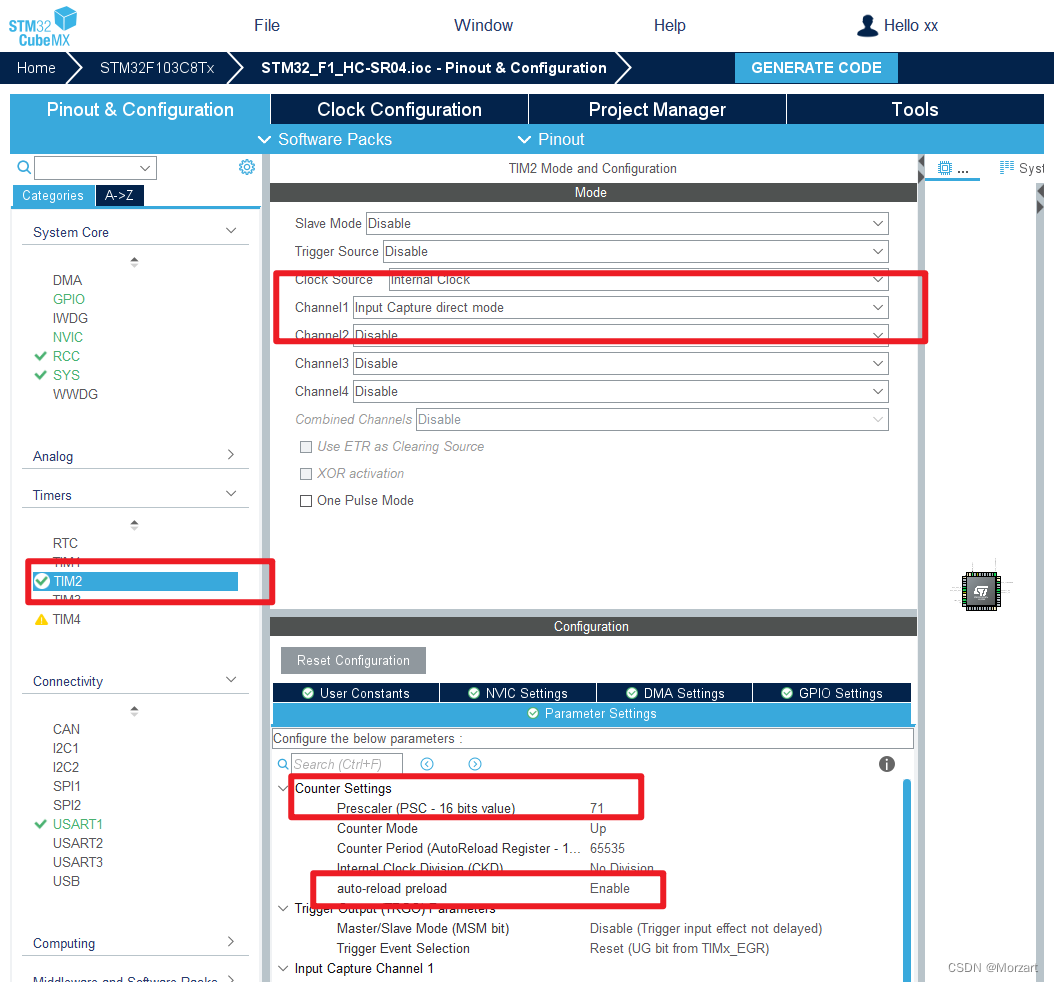
5.配置定时器
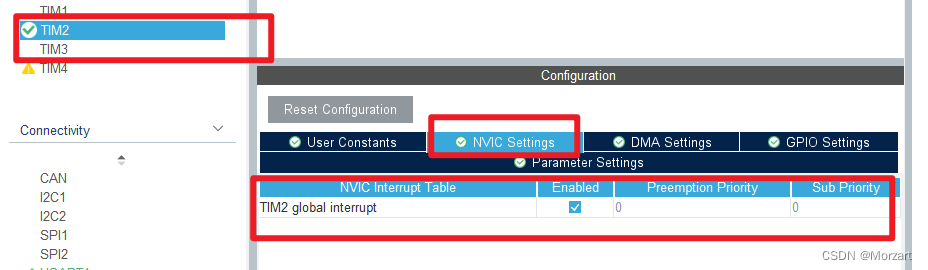
6.开启定时器中断
7.设置路径、生成代码工程

(二)代码编写
main.c:
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** <h2><center>© Copyright (c) 2022 STMicroelectronics.* All rights reserved.</center></h2>** This software component is licensed by ST under BSD 3-Clause license,* the "License"; You may not use this file except in compliance with the* License. You may obtain a copy of the License at:* opensource.org/licenses/BSD-3-Clause********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "SR04.h"
#include "led.h"
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_TIM2_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 *//* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){float distance = SR04_GetData();//HAL_Delay(1500);/* USER CODE END WHILE */// 根据距离计算闪烁频率uint32_t flashRate = CalculateFlashRate(distance);LED_Flash(flashRate); // 闪烁LED/* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */SR04.h:
#ifndef __SR04_H
#define __SR04_H
#include "main.h"
#include "tim.h"
#include "stdio.h"#define TRIG_H HAL_GPIO_WritePin(Trig_GPIO_Port,Trig_Pin,GPIO_PIN_SET)
#define TRIG_L HAL_GPIO_WritePin(Trig_GPIO_Port,Trig_Pin,GPIO_PIN_RESET)void delay_us(uint32_t us);
float SR04_GetData(void);#endifSR04.c:
#include "SR04.h"
#include "stm32f1xx_hal.h" float distant; //测量距离
uint32_t measure_Buf[3] = {0}; //存放定时器计数值的数组
uint8_t measure_Cnt = 0; //状态标志位
uint32_t high_time; //超声波模块返回的高电平时间//===============================================读取距离
float SR04_GetData(void)
{switch (measure_Cnt){case 0:TRIG_H;delay_us(30);TRIG_L;measure_Cnt++;__HAL_TIM_SET_CAPTUREPOLARITY(&htim2, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_RISING);HAL_TIM_IC_Start_IT(&htim2, TIM_CHANNEL_1); // 启动输入捕获break;case 3:high_time = measure_Buf[1] - measure_Buf[0]; // 高电平时间printf("\r\n----高电平时间-%d-us----\r\n", high_time);float distance = (high_time * 0.034f) / 2; // 单位cmprintf("\r\n-检测距离为-%.2f-cm-\r\n", distance);measure_Cnt = 0; // 清空标志位TIM2->CNT = 0; // 清空计时器计数// 返回计算得到的距离值return distance;}return 0; // 如果没有测量完成,返回0或合适的默认值
}//===============================================us延时函数void delay_us(uint32_t us)//主频72M
{uint32_t delay = (HAL_RCC_GetHCLKFreq() / 4000000 * us);while (delay--){;}
}//===============================================中断回调函数
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)//
{if(TIM2 == htim->Instance)// 判断触发的中断的定时器为TIM2{switch(measure_Cnt){case 1:measure_Buf[0] = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1);//获取当前的捕获值.__HAL_TIM_SET_CAPTUREPOLARITY(&htim2,TIM_CHANNEL_1,TIM_ICPOLARITY_FALLING); //设置为下降沿捕获measure_Cnt++; break; case 2:measure_Buf[1] = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1);//获取当前的捕获值.HAL_TIM_IC_Stop_IT(&htim2,TIM_CHANNEL_1); //停止捕获 或者: __HAL_TIM_DISABLE(&htim5);measure_Cnt++; }}}led.h:
#ifndef __LED_H__
#define __LED_H__#include "stm32f1xx_hal.h"void LED_Init(void);
void LED_Flash(uint32_t period);
uint32_t CalculateFlashRate(float distance);#endif // __LED_H__
led.c:
#include "led.h"#define LED_GPIO_Port GPIOB
#define LED_Pin GPIO_PIN_9void LED_Init(void) {GPIO_InitTypeDef GPIO_InitStruct = {0};// 使能GPIOB时钟__HAL_RCC_GPIOB_CLK_ENABLE();// 配置GPIO Pin为推挽输出,无上拉电阻,低频率GPIO_InitStruct.Pin = LED_Pin;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(LED_GPIO_Port, &GPIO_InitStruct);
}void LED_Flash(uint32_t period) {// 切换LED状态HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin);// 延时HAL_Delay(period);// 再次切换LED状态,完成一次闪烁HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin);
}uint32_t CalculateFlashRate(float distance) {uint32_t flashRate;if (distance < 10.0f) {flashRate = 100; // 距离小于10厘米时,快速闪烁} else if (distance < 50.0f) {flashRate = 500; // 距离在10-50厘米之间时,中速闪烁} else {flashRate = 1000; // 距离大于50厘米时,慢速闪烁}return flashRate;
}
三、效果展示
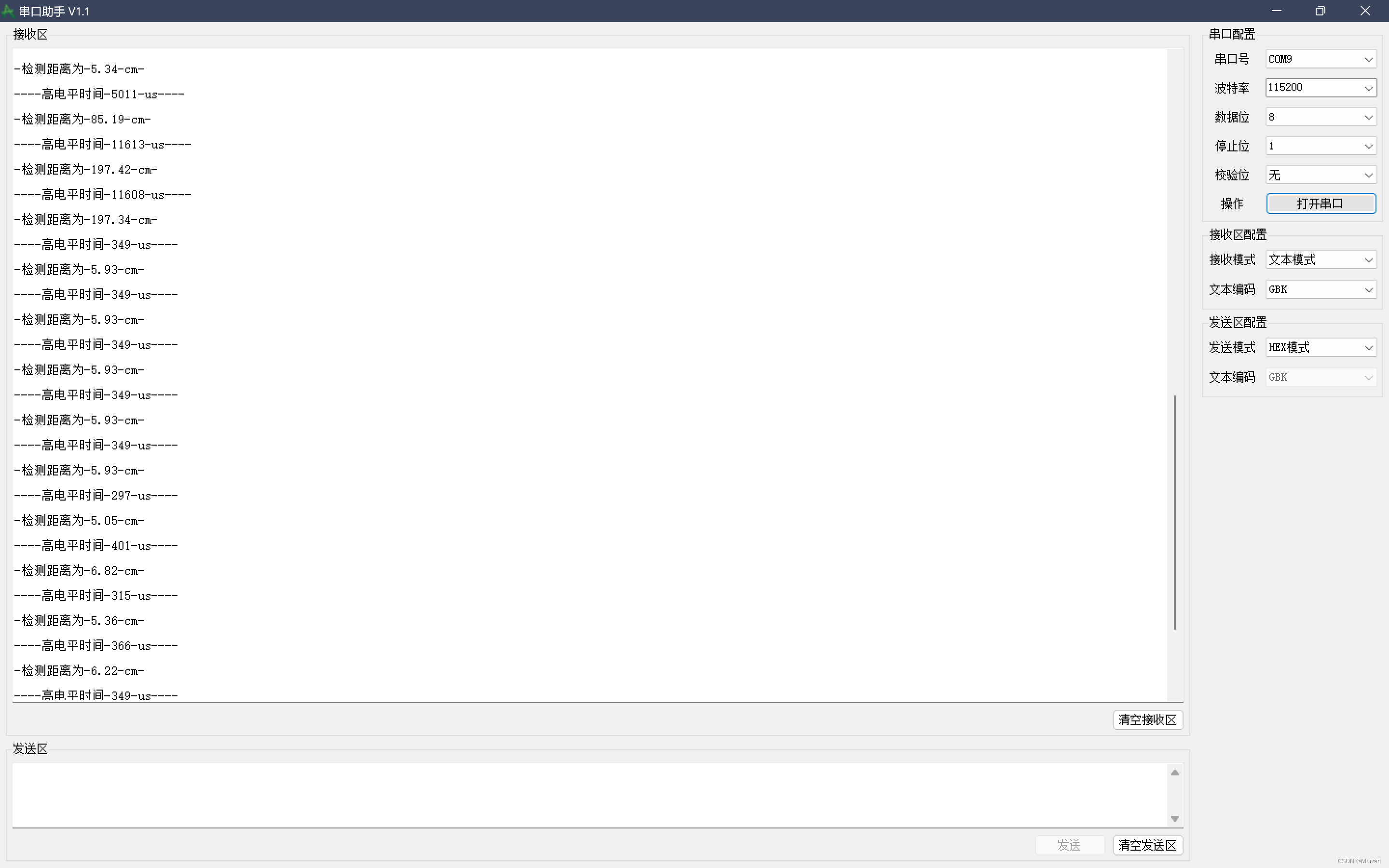
HC-SR04
四、总结
本次实现了STM32F103C8T6微控制器和HC-SR04超声波测距模块的结合应用,并通过LED闪烁频率表现出来。通过CubeMX的图形化配置和Keil5的开发环境,项目简化了开发流程,提高了开发效率。此外,项目还提供了对超声波测距原理的深入理解,以及如何通过软件控制硬件来实现特定功能的方法。
五、引用
【嵌入式创客工坊】STM32系列(HAL库)——F103C8T6通过HC-SR04超声波模块实现测距
这篇关于STM32F103C8T6 HC-SR04超声波模块——超声波障碍物测距(HAl库)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




