超声波专题

超声波清洗机哪个品牌比较好一点的?清洁力强的超声波清洗机品牌
随着生活水平的不断提升和幸福感的增强,珠宝、饰品和眼镜等物品已成为许多家庭的常备之物。然而,这些贵重细小的物件易于积聚微尘与隐形细菌,长此以往可能悄悄影响家人的健康,毕竟细菌是肉眼难以察觉的隐患。超声波清洗机应运而生,它以高科技手段有效地解决了这一隐忧,深层清洁,守护家人免受微小污染物的潜在威胁。不过现在市面上超声波清洗机品牌挺多的,究竟有哪些品牌的超声波清洗机比较好一点呢?接下来就为大家带来四款

树莓派使用WiringPi库配合时间函数实现超声波测距
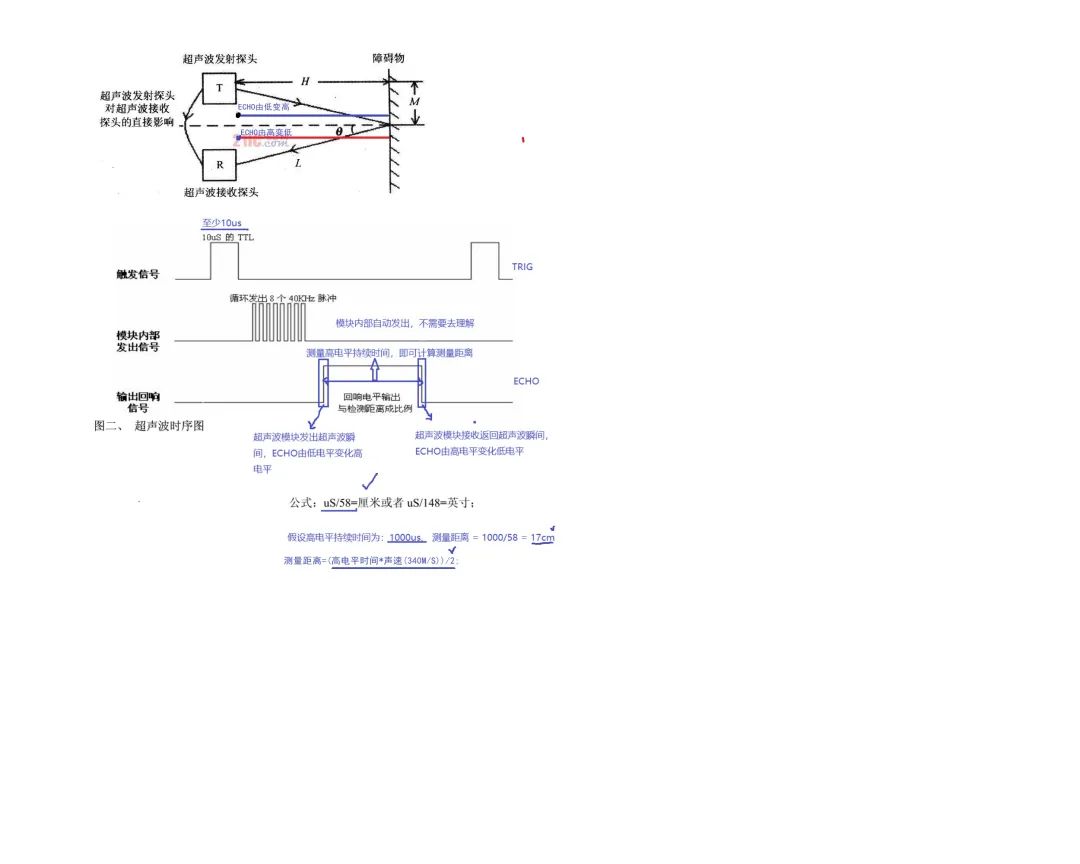
树莓派使用WiringPi库配合时间函数实现超声波测距 文章目录 树莓派使用WiringPi库配合时间函数实现超声波测距一、HR-04超声波模块原理1.1 超声波测距原理:1.2 超声波时序图: 二、树莓派与超声波模块硬件连接三、时间函数3.1 时间函数gettimeofday()原型和头文件: 四、实现超声波测距4.1 使用wiringOP库和时间函数实现超声波测距: 五、实现超声波测距

最好的超声波清洗机是哪款牌子?高颜值的超声波清洗机
超声波清洗机凭借其出色的洁净能力与简便的操作方式,正逐渐成为广受欢迎的清洁优选。它以深度而不伤材质的清洗效果著称,不过市面上品牌琳琅满目,型号多样,价格波动大,给消费者挑选造成了不小的挑战。作为一名眼镜爱好者,我对超声波清洗机颇有研究,并乐意在此为朋友们推荐几款品质卓越的机型,希望能对你选购超声波清洗机有所帮助! 超声波清洗机选购攻略 技巧1:优选专业实力强悍的品牌 在选择超声波清洗机时,偏

超声波清洗机哪个品牌比较好?耐用超声波清洗机推荐
经济技术高速发展,眼镜作为人们日常生活中常见的物品,很多人可能只做了表面的擦拭,但是在眼镜上还有许多肉眼所看不见的细菌,这个时候还需要专业工具去对付它们,很多人为了解决这个隐患便开始使用超声波清洗机,由于市面上超声波清洗机的品牌繁多,怎么样才能买到一款合适的超声波清洗机呢?想要购买的朋友们可以来看看这篇推荐。 超声波清洗机选购攻略 技巧1:优选专业实力强悍的品牌 选择专业实力强悍的超声波清洗
超声波眼镜清洗机买哪款?2024超声波眼镜清洗机推荐
超声波清洗机正逐渐成为广受欢迎的清洁解决方案,它以高效、深入且细腻的清洁效果,以及操作上的简易性,赢得了消费者的广泛喜爱。不过,市面上琳琅满目的品牌、多样化的型号及波动的价格区间,确实给消费者挑选时带来了不小的挑战。作为一名眼镜领域的常客,我对超声波清洗机颇为熟悉,今天就来为各位朋友推荐4款品质出众的超声波清洗机,让大家选购时更为省心。 超声波清洗机选购攻略 技巧1:优选专业实力强悍的品牌

超声波清洗机哪个品牌好用又实惠? 品质上等的超声波清洗机评选
在我们的日常生活中,许多频繁使用的个人小物常常成为卫生死角,比如缠绕着汗渍的手表带、累积微尘的项链、需要保持洁净的牙套、或是剃须刀这类带有复杂结构的用品,乃至每日不可或缺的眼镜。传统清洁手段面对这些细缝间的污垢时显得力不从心。正是出于这样的需求,一款便捷高效、操作简便的家用超声波清洗机变得尤为重要,正好近期体验了4款好用的超声波清洗机,今天就让我们来了解一下吧! 超声波清洗机选购攻略 技巧1:

国内超声波清洗机哪个品牌好?质量好的超声波清洗机推荐
在我们的日常生活中,不难发现许多频繁接触的小物件,它们因为结构复杂或缝隙多,容易积累污垢,却又难以通过常规方法彻底清洁,诸如手表链、珠宝饰品、矫正牙套、剃须刀乃至眼镜等。面对这些清洁难题,一款小巧便携、操作简便的超声波清洗机显得尤为重要。不过国内超声波清洗机的品牌挺多的,有哪些质量比较好的品牌呢?今天我就来为大家介绍几款! 超声波清洗机选购攻略 技巧1:优选专业实力强悍的品牌 挑选超声波清洗

C语言《智能自平衡小车,实现平衡功能的基础上,加入了超声波避障、超声波跟随、蓝牙遥控等功能》+源代码+文档说明
文章目录 源代码下载地址项目介绍项目功能 项目备注源代码下载地址 源代码下载地址 点击这里下载源码 项目介绍 C语言《智能自平衡小车,实现平衡功能的基础上,加入了超声波避障、超声波跟随、蓝牙遥控等功能》+源代码+文档说明 项目功能 为了实现小车功能,小车硬件主要包括: 控制核心板带编码器的直流电机车架12V 1900mah锂电池 项目备注 1、该资源内项目代码都经过


超声波智能水表通讯方式有哪些?
超声波智能水表采用多种通讯方式实现数据传输,包括但不限于有线连接、无线网络、以及短距离无线通信技术,这些方式各有优劣,适用于不同的应用场景。 一、通讯方式概述 1.有线通讯 -RS-485接口:这是一种半双工的串行通信接口标准,具有较强的抗干扰能力和较长的传输距离,适合用于固定设施间的稳定数据交换。 -M-Bus总线:主要用于计量设备的远程抄表系统,特点是低功耗、易于布线,广泛应用于欧洲市

家用超声波清洗机哪个品牌好用?真正好用的超声波清洗机品牌
在当今追求效率与生活品质并重的社会背景下,维持周遭环境的清洁卫生成为了我们日常生活中不可或缺的一环。对于那些在生活细节上追求极致的人来说,一款高效且易用的超声波清洗机,无疑是升级家居生活品质的理想伙伴。面对市场上琳琅满目的超声波清洗机品牌,究竟哪个品牌的超声波清洗机比较好用呢?接下来就为大家推荐四款真正好用的家用超声波清洗机推荐! 超声波清洗机选购攻略 技巧1:优选专业实力强悍的品牌 在选择

Linux驱动开发基础(sr04超声波模块)
所学来自百问网 目录 1. SR04 超声波简介 2. 硬件设计 3. 软件设计 4. 示例代码 4.1 驱动代码 4.1.1 轮询模式 4.1.2 中断模式 4.3 应用程序 4.4 Makefile 4.5 实验效果 1. SR04 超声波简介 超声波测距模块是利用超声波来测距。模块先发送超声波,然后接收反射回来的超声波,由反射经历的时间和声音的传播速度340

最好的超声波清洗机是哪一款?好用的超声波清洗机排名
对于诸多朋友而言,眼镜已成为日常不可或缺的伙伴,但随时间推移,其表面不免积淀微尘与不可见的细菌,因此,保持眼镜清洁显得尤为重要。超声波清洗机,作为高效便捷的清洁神器,能深层清除镜片上的污迹,还原眼镜如初清澈。鉴于此,不少优质超声波清洗机品牌脱颖而出,那么这么多品牌中哪款超声波清洗机最好呢?接下来就为大家推荐四款好用的超声波清洗机! 超声波清洗机选购攻略 技巧1:优选专业实力强悍的品牌 挑选那

超声波清洗机哪个牌子好?清洁力强的超声波清洗机品牌
现在戴眼镜的是越来越多了,眼镜清洁就是刚需,像我拥超声波清洗机之前,清洁眼镜就是水洗洗,眼镜布擦擦就好了。偶尔去眼镜店才会用超声清洗机清洗,有些眼镜店还没有。现在自己有了超声波清洗机你随时随地就能给眼镜洗澡,而且不仅仅能洗眼镜,你的戒指,项链,表带,指甲刀,只要能放进去的都能清洗,而且还能杀菌消毒。那么,超声波清洗机应该怎么选呢?究竟哪个品牌的超声波清洗机更值得入手呢?为此本文整理了一些关于超声波

买超声波清洗机什么牌子好?好用的超声波清洗机推荐
尽管超声波清洗机对不少人而言较为新鲜,尤其是对非眼镜佩戴者,但它其实并不陌生,常现身于眼镜店作为专业清洁工具。有人或许认为,拂去眼镜尘埃仅需一擦即可,实际上,长时间佩戴后,镜片与框架累积的细微尘埃、汗渍与油脂,非普通擦拭所能根除,此时,超声波清洗机便展现出其深层净化的实力,还原眼镜透亮本色。现今市场充斥着各式家用型超声波清洗设备,究竟买什么样的超声波清洗机牌子比较好呢?接下来今天就为大家推荐四款好

超声波清洗机哪家好一点?深度测评四款热销高质量超声波清洗机
眼镜如果不定期清洗,污渍和灰尘会积累在镜片上,阻挡视线,影响佩戴者的视觉清晰度,长期下来可能会导致眼睛疲劳,甚至影响视力健康。而随意用眼镜布或衣物擦拭,可能会因为灰尘中的硬颗粒划伤镜片,从而缩短镜片的使用寿命。因此,在清洗眼镜时,我们需要更加用心。超声波清洗机的出现,解决了眼镜清洗的难题,许多人却担心超声波清洗机会损坏眼镜。本文将为大家解释超声波清洗机的工作原理,并推荐几款值得信赖的超声波清洗机品

超声波俱乐部:AI创始人啤酒之夜
8月17日,第二十期超声波俱乐部内部分享会在北京Meta Space举办,本期的主题是AI创始人啤酒之夜。 到场的嘉宾有:超声波创始人杨子超,超声波联合创始人、和牛商业创始人刘思雨,中国国际经济交流中心国经咨询研究员、文化与旅游部中国建筑文化研究会理事徐曦,豆神集团副总裁&CTO阎鹏,着魔APP创始人杨磊,粟特方舟创始人韩祖利,一亩田COO邓旭,APUS AI实验室首席科学家张旭,新壹科


超声波清洗机哪个牌子好用点?四大卓越臻品不容错过!
选购超声波清洗机能为日常生活提供非常多的便利!比如像是戴眼镜或者是有婴儿的家庭,使用超声波清洗机不仅能够帮助清洗需要清洗的物品,同时更能保证物品健康清洁,对清洗的物品进行杀菌灭菌!相对于比较费时间并且容易损坏物品或者是清洗不干净手洗方式,超声波清洗成为了主流!那么有哪些好用的超声波清洗机推荐呢,让我们一起来看一下吧! (上面展示是我测评过几款超声波清洗机) 一、超声波清洗机的挑选攻略

ROS系统中解析通过CAN协议传输的超声波传感器数据
CAN Bus接口设置:确保你的ROS系统可以通过CAN Bus接口与外部设备通信。这可能需要CAN卡或CAN适配器,以及相应的驱动程序和库。 CAN消息接收:配置ROS节点来监听特定的CAN ID,这通常是超声波传感器的标识符。 数据解析:从接收到的CAN消息中解析出超声波传感器的数据。这通常涉及理解传感器制造商提供的数据格式。 消息发布:将解析后的数据转换为ROS可以理解的消息类型,例
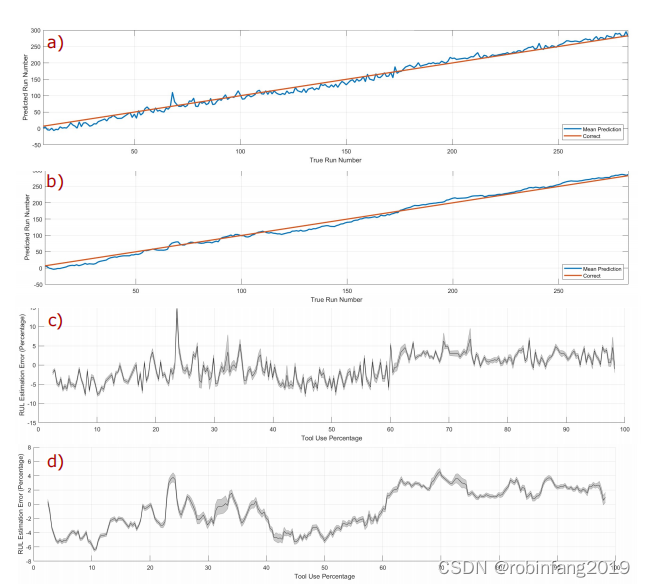
使用超声波麦克风阵列预测数控机床刀具磨损
预测性维护是使用传感器数据来推断机器状态,并从这些传感器数据中检测出在故障发生之前存在的缺陷或故障的过程。预测性维护在所有工业领域都是一种日益增长的趋势,包括轴承故障检测、齿轮磨损检测或往复式机器中的活塞磨损等许多其他例子。在预测性维护领域,应用了大量传感器,包括声学、振动、热传感器、电流传感器以及几乎可以想象的任何其他传感模式。 在数控车床中,工件被安装在一个主轴上,然后主

超声波清洗机哪家好?四大人气爆单超声波清洗机汇总安利
在日常生活中,我们每天都在与灰尘和污渍作斗争,尤其是对于那些细小、精密的物品,如眼镜。眼镜不仅是视力矫正的工具,更是我们个人形象的一部分。一副干净、明亮的眼镜可以让我们的视线更加清晰。因为保持眼镜的清洁是一件很重要的事情!随着科技的发展,超声波清洗机已经成为了清洗眼镜和其他精密物品的首选工具。今天,我就给家人们带来一些非常可靠的超声波清洗机! (以上是我本人使用过的几款超声波清洗机)
基于stm32最小版的超声波测距模块
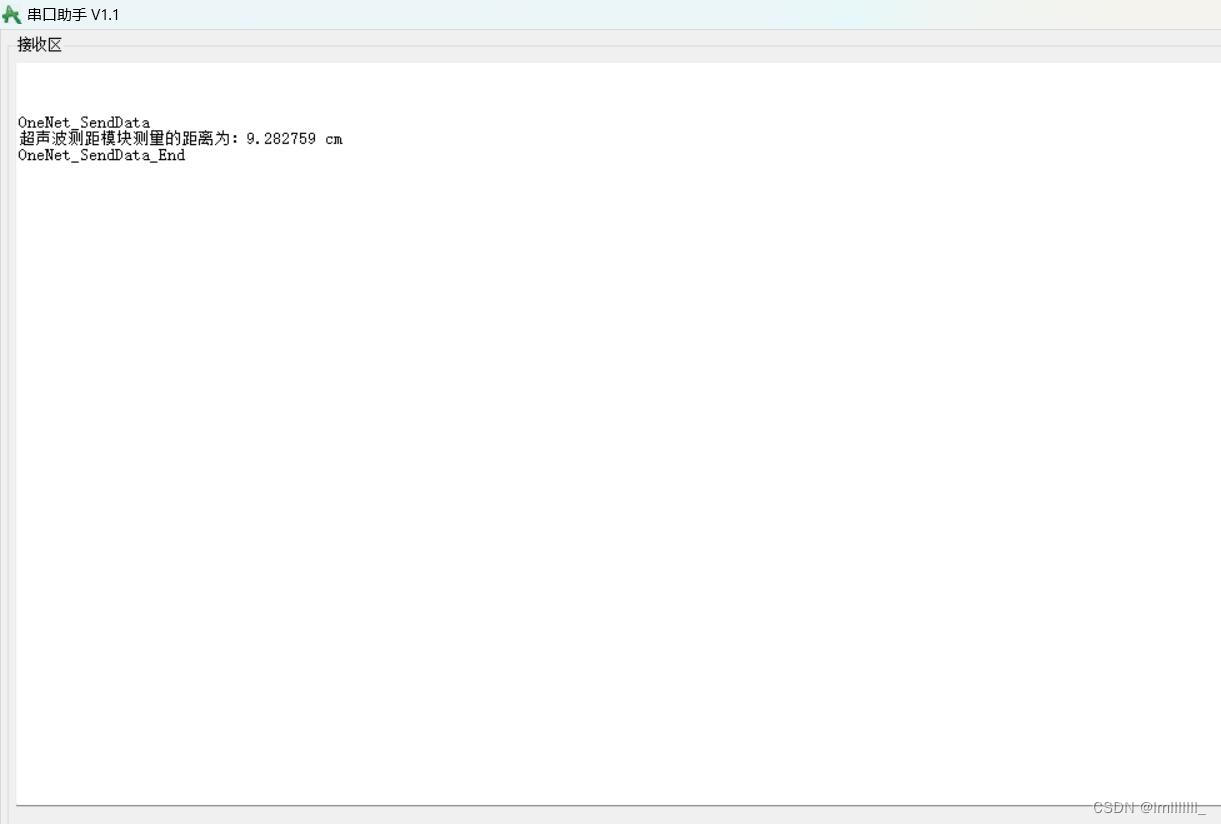
目录 一、模块准备 二、HC-SR04模块原理解释 三、程序完整代码 四、烧录结果 总结 一、模块准备 STM32F103C8T6 HC-SR04 ST-Link(其他烧录器也可以) 0.96寸OLED屏幕(非必须,仅供显示测距结果,可以使用串口助手代替) 若干杜邦线 二、HC-SR04模块原理解释 HC-SR04超声波测距模块提供2cm~400cm的测距功
基于单片机的超声波倒车雷达设计
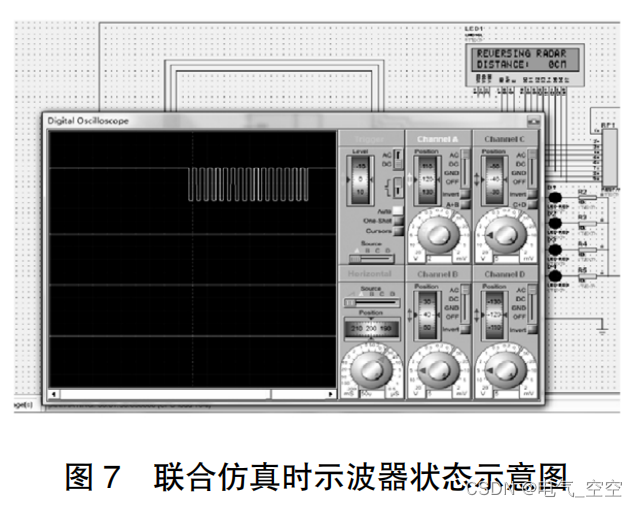
摘 要:文 章设计了一种基于单片机的超声波倒车雷达系统,以 AT89C51 型单片机作为控制核心,集距离测量、显示,方位显示和危险报警于一体,以提高驾驶者在倒车泊车时的安全性和舒适性。本设计采用 Keil 软件对系统程序进行调试,并采用 Proteus 对整个系统进行了仿真,仿真结果达到了预期的效果。 关键词:超声波;测距;单片机;倒车雷达 前言 近年来,随着驾
STM32 | 超声波实战
01、上节回顾 STM32 | HC-SR04 超声波测距模块 | DHT11数字温湿度传感器(第七天)STM32 | 数字温湿度传感器DHT11STM32 | HC-SR04 超声波测距模块STM32 | DHT11数字温湿度传感器实战 02、超声波图示 03、超声波头文件 #ifndef __SR04_H#define __SR04_H#include "stm32f4x
STM32 | 超声波写倒车雷达小系统
01、知识回顾 STM32 | HC-SR04 超声波测距模块 | DHT11数字温湿度传感器(第七天)STM32 | 数字温湿度传感器DHT11STM32 | HC-SR04 超声波测距模块STM32 | DHT11数字温湿度传感器实战STM32 | 超声波实战STM32 | 方式1:手机发送指令,开发板向手机发送温湿度;方式2:手机发送指令,开发板定时向手机发送温湿度。 02、作业2