sr04专题

Linux驱动开发基础(sr04超声波模块)
所学来自百问网 目录 1. SR04 超声波简介 2. 硬件设计 3. 软件设计 4. 示例代码 4.1 驱动代码 4.1.1 轮询模式 4.1.2 中断模式 4.3 应用程序 4.4 Makefile 4.5 实验效果 1. SR04 超声波简介 超声波测距模块是利用超声波来测距。模块先发送超声波,然后接收反射回来的超声波,由反射经历的时间和声音的传播速度340

基于stm32和HC_SR04超声波模块的测距和报警
基于stm32和HC_SR04超声波模块的测距和报警 目录 **基于stm32和HC_SR04超声波模块的测距和报警****一.工作原理****二.功能实现****HC_SR04初始化和读取距离****使用呼吸灯表示距离远近****主函数编写** **三.效果****四.关于modbus和串口RS485****五.总结** 一.工作原理 (1)采用 IO 口 TRIG 触发测
STM32F103C8T6 HC-SR04超声波模块——超声波障碍物测距(HAl库)
超声波障碍物测距 一、HC-SR04超声波模块(一)什么是HC-SR04?(二)HC-SR04工作原理(三)如何使用HC-SR04(四)注意事项 二、程序编写(一)CubeMX配置1.芯片选择2.配置RCC、SYS、时钟树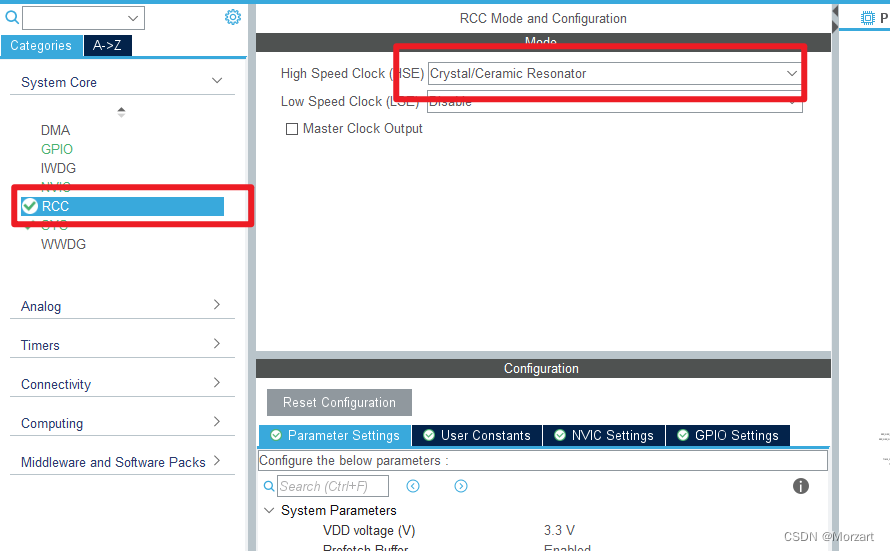3

超声波模块HC-SR04简介以及编程
1、本模块性能稳定,测度距离精确,模块高精度,盲区小。 产品应用领域: 机器人避障 物体测距 液位检测 公共安防 停车场检测 。 2、 主要技术参数: 1:使用电压:DC---5V 2:静态电流:小于2mA 3:电平输出:高5V 4:电平输出:底0V 5:感应角度:不大于15度 6:探测距离:2cm-
028——从GUI->Client->Server->driver实现对SR04的控制
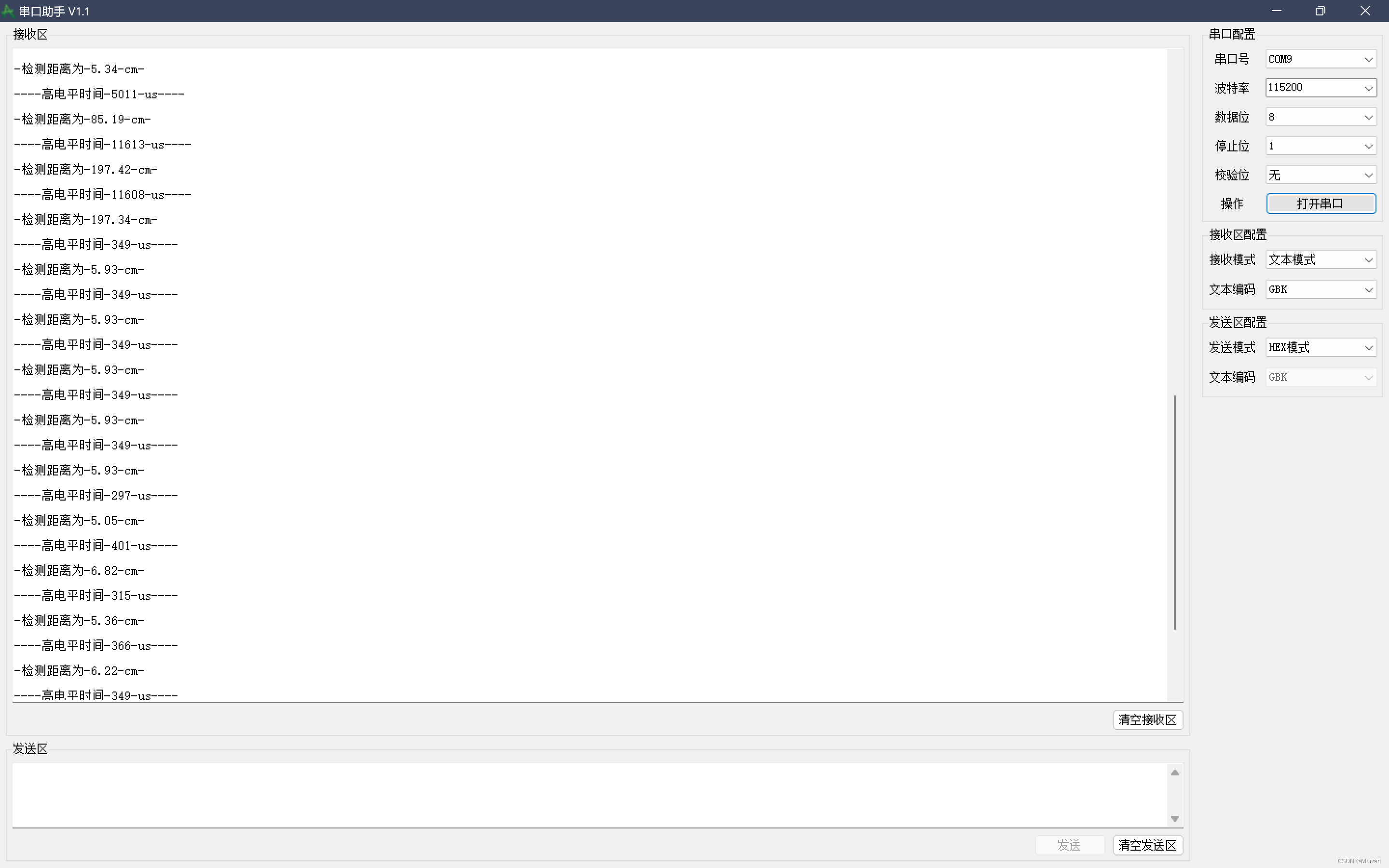
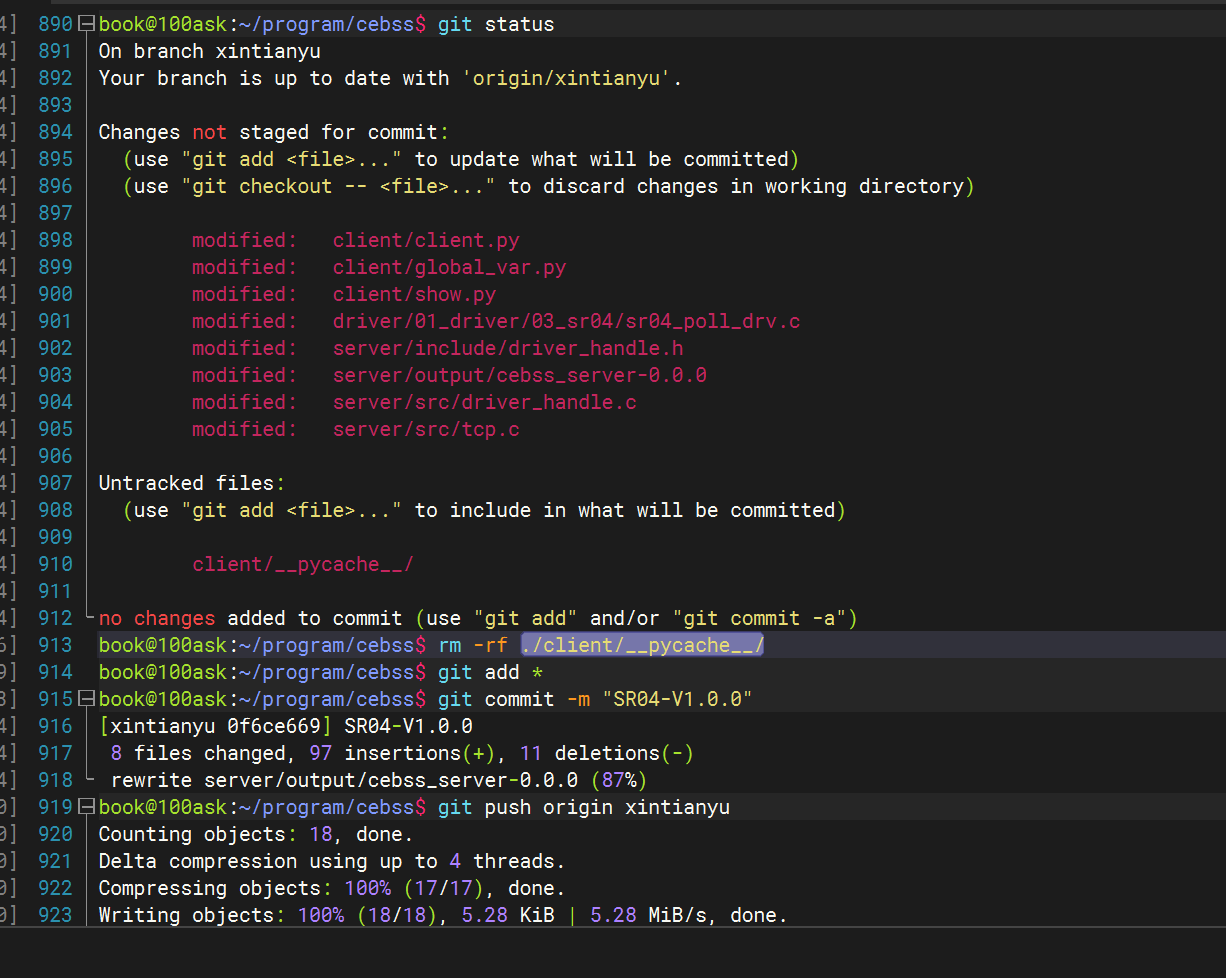
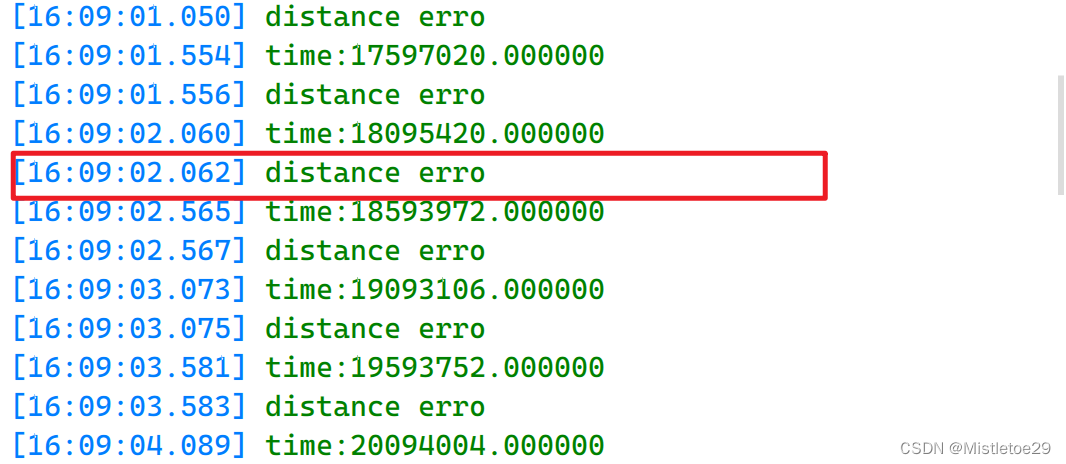
目录 1、修改GUI 2、修改数据处理和发送缓冲区的帧 3、修改server中对SR04的处理 4、添加SR04的dirver_handle 5、验证 6、遇到问题及解决方法 7、 项目管理操作 1、修改GUI 2、修改数据处理和发送缓冲区的帧 添加对SR04按键事件处理 添加对接收数据的处理 3、修改server中对SR04的处理

014——超声波模块驱动开发Plus(基于I.MX6uLL、SR04和poll机制)
目录 一、基础知识 二、分析为什么打印会影响中断 三、驱动程序 四、应用程序 五、验证及其它 一、基础知识 013——超声波模块驱动开发(基于I.MX6uLL与SR04)-CSDN博客 二、分析为什么打印会影响中断 asmlinkage __visible int printk(const char *fmt, ...) { va_list arg
STM32——超声测距HC_SR04记录
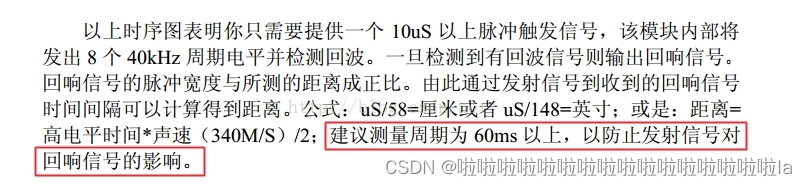
一、HC_SR04简述 HC-SR04超声波测距模块可提供 2cm-400cm的非接触式距离感测功能,测距精度可达高到 3mm;模块包括超声波发射器、接收器与控制电路。 基本工作原理: (1)采用IO 口TRIG 触发测距,给最少10us 的高电平信呈。 (2)模块自动发送8 个40khz 的方波,自动检测是否有信号返回; (3)有信号返回,通过IO 口ECHO 输出一个高电平

STM32F103VET6超声波模块HC-SR04 的测试例程
近来有时间,整理一下资料,自己近十年来,业余画了不少的开发测试板,在淘宝上也买了不少的板子与器件,一直以来,都喜欢DIY,今天整理了一下超声波模块HC-SR04的程序,网上资料应该不少,自己工作中也接触过。记录一下。 超声波如何设计的我不太关心,我只关心如何使用。这个模块可以+3.3V供电,四个引脚,使用STM32两个GPIO引脚控制即可,测试起来,简单。

基于STM32F103的超声波传感器实验:HC-SR04传感器
(本人新手,程序可能有些地方不规范,但是是可用的,只需初始化一个串口,然后在串口助手就可以看到距离数据。) 首先简要介绍HC-SR04模块的工作原理。该模块使用超声波测距的原理,通过发射超声波并计算从物体反射回来所需时间间隔来推算距离。模块主要包括超声波发射部、接收部及控制电路。测距时,先向Trig端口发送一个>10us的高电平脉冲来启动测距,然后模块会从Echo端口发出8周期的40Khz
光照传感器和超声波传感器介绍:MH-Sensor-Series和HC-SR04
(本文为简单介绍,主要观点来自网络) 传感器技术在现代科技中占据着举足轻重的地位,尤其是光照传感器和超声波传感器。在市场上,MH-Sensor-Series光照传感器和HC-SR04超声波传感器因其高性能、可靠性和易用性而受到了广泛关注。 MH-Sensor-Series光照传感器是一款非常出色的产品,它包括多种类型的光敏元件,如光敏电阻、光敏二极管和光敏三极管。这些传感器都采用了先进的光

【雕爷学编程】Arduino动手做(58)---HC-SR04超声波传感器模块2
37款传感器与模块的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止37种的。鉴于本人手头积累了一些传感器和执行器模块,依照实践出真知(一定要动手做)的理念,以学习和交流为目的,这里准备逐一动手试试多做实验,不管成功与否,都会记录下来——小小的进步或是搞不掂的问题,希望能够抛砖引玉。 【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验五
51单片机HC-SR04超声波测距lcd1602显示(程序+ad硬件设计+文档说明)
本帖主控使用STC89C52单片机,超声波测距采用HC-SR04模块,包含ad硬件设计和文档。 测距原理 超声波测距是通过不断检测超声波发射后遇到障碍物所反射的回波,从而测出发射和接收回波的时间差t,然后求出距S=Ct/2,式中的C为超声波波速。由于超声波也是一种声波,其声速C与温度有关。在使用时,如果温度变化不大,则可认为声速是基本不变的。如果测距精度要求很高,则应通过温度补偿的方法加以校正
基于HC-SR04传感器的避障机器人设计与实现
本文介绍了如何设计和实现一个基于HC-SR04超声波传感器的避障机器人。我们将详细讨论硬件和电路连接,并提供完整的Arduino代码。该机器人可以利用超声波传感器检测周围的障碍物,并采取相应的动作进行避障,实现自主导航。 引言: 避障机器人是一种经常应用于自主导航和智能交通系统的机器人。HC-SR04超声波传感器作为一种常用的距离测量传感器,非常适合用于机器人的避障应用。本文将介绍如何使用HC-
基于Arduino和HC-SR04的超声波测距系统设计
本文介绍了如何使用Arduino和HC-SR04超声波传感器设计并构建一个简单的超声波测距系统。我们将详细讨论硬件连线和编程步骤,并提供完整的Arduino代码。此系统可以应用于各种需要测量距离的项目,例如智能车辆、机器人和安防系统。 引言: 超声波测距是一种常见且有效的测量距离的技术。HC-SR04超声波传感器是一种常用的低成本传感器,具有测距精度高、响应速度快等优点。结合Arduino开发板

超声波测距HC-SR04模块的简单应用
文章目录 一、HC-SR04HC-SR04是什么?HC-SR04测距的原理 二、使用步骤1.硬件最远探测距离调节硬件连接 2.软件1.初始化配置代码如下(示例):引脚初始化定时器初始化 2.引脚输入输出配置代码如下(示例):3.定时器中断处理代码如下(示例):4.HCSR04测距函数代码如下(示例):5.显示函数代码如下(示例):6.变量定义如下(示例):7.显示结果如下(示例):图片串口打
超声波测距HC-SR04模块的简单应用
文章目录 一、HC-SR04HC-SR04是什么?HC-SR04测距的原理 二、使用步骤1.硬件最远探测距离调节硬件连接 2.软件1.初始化配置代码如下(示例):引脚初始化定时器初始化 2.引脚输入输出配置代码如下(示例):3.定时器中断处理代码如下(示例):4.HCSR04测距函数代码如下(示例):5.显示函数代码如下(示例):6.变量定义如下(示例):7.显示结果如下(示例):图片串口打
STM32超声波——HC_SR04
文章目录 一.超声波图片二.时序图三.超声波流程四.单位换算五.取余计算六.换算距离七.超声波代码 一.超声波图片 测量距离:2cm——400cm 二.时序图 (1).以下时序图要先提供一个至少10us的脉冲触发信号,告诉单片机我准备好了,然后该超声波模块内部将发出8个40Khz的的周期电平并检测回波,这时候是超声波模块发送的波,检测能不能发送超声波,与单片机无关,所以代码
STM32超声波——HC_SR04
文章目录 一.超声波图片二.时序图三.超声波流程四.单位换算五.取余计算六.换算距离七.超声波代码 一.超声波图片 测量距离:2cm——400cm 二.时序图 (1).以下时序图要先提供一个至少10us的脉冲触发信号,告诉单片机我准备好了,然后该超声波模块内部将发出8个40Khz的的周期电平并检测回波,这时候是超声波模块发送的波,检测能不能发送超声波,与单片机无关,所以代码

超声波检测SR04如果ECHO经过很长时间没有变高电平,程序是不是就会卡死在这里
超声波检测SR04如果ECHO经过很长时间没有变高电平,程序是不是就会卡死在这里, 1:我最开始想的是有可能会卡死在这里。 2:我想通过一个do while进行检测超时,SR04有效检测范围在2cm到450cm,我想的是那就给他当成1000cm(来回450cm共900cm),1000cm除以340m/s(声速)大约等于30ms。我就用do while进行30ms的检测超时,我为什么会这样想
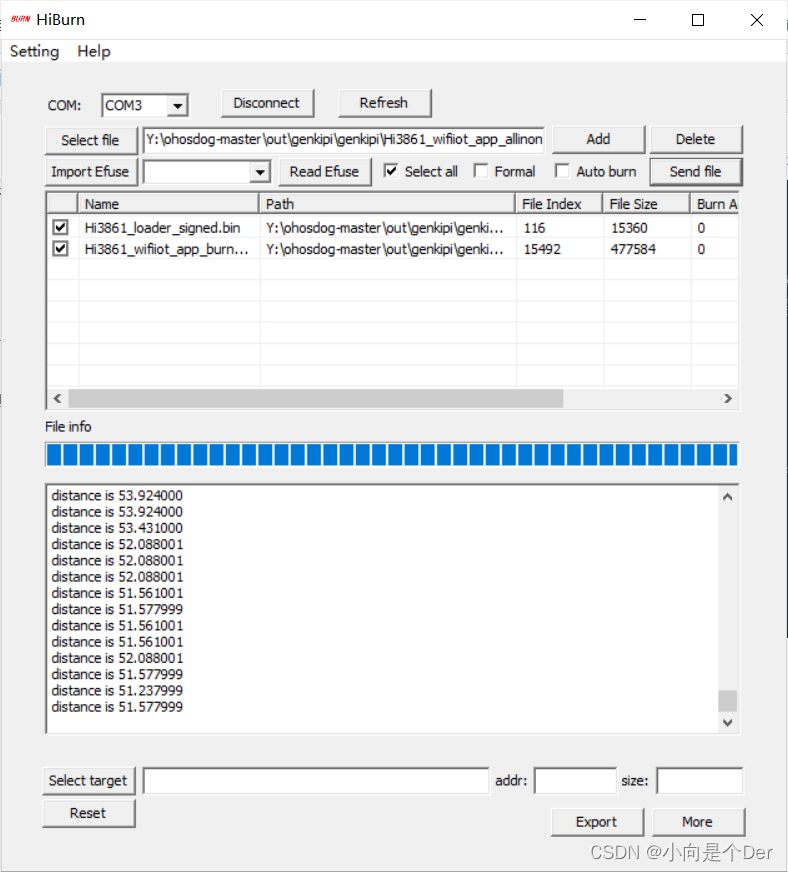
OpenHarmony南向学习笔记——Hi3861+HC-SR04超声波检测
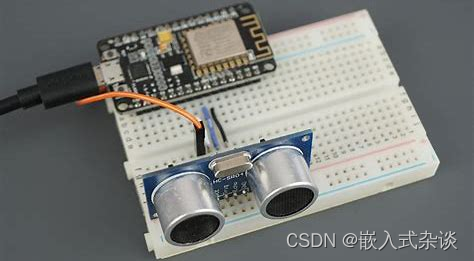
Hi3861+HC-SR04超声波检测 前言模块介绍1. GPIO模式时序图通信流程代码 前言 最近参加立创训练营,用Hi3861做机器狗,接着上一段时间的学习继续OpenHarmony的设备开发学习,之前的笔记中一直没有使用到超声波模块,在这次的训练营中,笔者打算尝试在Hi3861试试。 模块介绍 产商的手册如下所示,笔者购买的是2022款,链接如下:「超声波测距模块 H

单片机设计_智能可视化倒车系统(STM32、OV7670摄像头、HC-SR04超声波传感器)
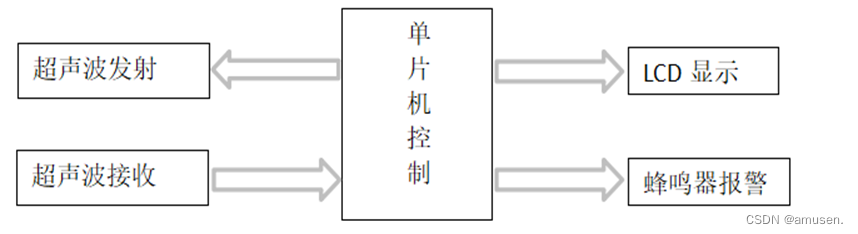
智能可视化倒车系统 想要更多项目私wo!!! 一、系统总体框图 当小车前进时,LCD上可显示小车前进的提示信息等;当小车后退时,开始利用图像传感器实现对小车后侧的图像实时监测,利用距离传感器实现对小车后侧障碍物的距离实时监测,并将测量数据传送至STM32进行处理,然后由控制器根据所检测的各种数据实现在LCD模块上显示出来。根据要求设计要求,可得到系统总体框图如下: 二、总体电路设计 根

STM32外设系列—HC-SR04(超声波)
🎀 文章作者:二土电子 🌸 关注文末公众号获取其他资料和工程文件! 🐸 期待大家一起学习交流! 文章目录 一、超声波测距基本原理二、超声波传感器简介三、HC-SR04测距实现思路四、超声波测距程序实现4.1 HC-SR04初始化程序4.2 TIM开关程序4.3 获取定时时间4.4 计算测量距离4.5 宏定义 五、应用实例六、拓展应用 一、超声波测距基本原理

超声波传感器-HC-SR04
HC-SR04 超声波测距模块可提供 2cm-400cm 的非接触式距离感测功能,测距精度可达高到 3mm; 一、超声波工作原理 1、CH-SR04 相关电气参数 二、计算公式(理解时参考时序图) (1)采用 IO 触发测距,给至少 10us 的高电平信号; (2)模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回; (3)有信号返回,

stm32f1驱动HC-SR04超声波测距模块
这段时间算是比较系统的学习了一点stm32相关的东西,驱动超声波测距模块这个简单的小任务综合了定时器,中断,串口三个知识点,拿来练手还是挺不错的 首先先介绍一下HC-SR04模块: 以上是该模块原理的简介,就我个人体验而言,实际使用中,HC-SR04的稳定性可以说是很不错的, 测距的精度与范围基本上可以满足大部分小型项目的需求,最关键的一点,它的驱动非常的简单(虽然这并不影响菜鸡的我搞了

【特纳斯电子】超声波的测距原理分析(51单片机+HC-SR04 超声波测距)
1 超声波的简单分析 超声波传感器是一种常用的传感器,它利用超声波的特性来测量距离或探测物体的存在。超声波传感器发射超声波脉冲,并通过测量超声波的反射时间来计算距离。当超声波遇到物体时,会发生回波,并被传感器接收到。通过测量回波的时间延迟,可以确定物体与传感器之间的距离。 超声波传感器常用于测距应用,例如机器人导航、停车辅助系统、无人机避障等。它具有非接触式、高精度和快速响应的特点。超声波传感器

基于单片机的水位检测仪设计(HC-SR04+1602+UART+ADC)
目 录 功能要求一、材料准备工 具:元器件部署 二、实现原理分析三、硬件设计1、单片机最小系统2、水位测量电路3、1602显示电路4、报警电路5、按键电路6、供电电路7、注水电路 四、程序设计1、工程搭建2、1602显示程序设计3、超声波程序设计4、获取水位高度程序设计5、按键程序设计6、功能程序实现 五、总 结六、附 录附录1:整体电路原理图附录2:元件清单附录3:资源分享