测距专题

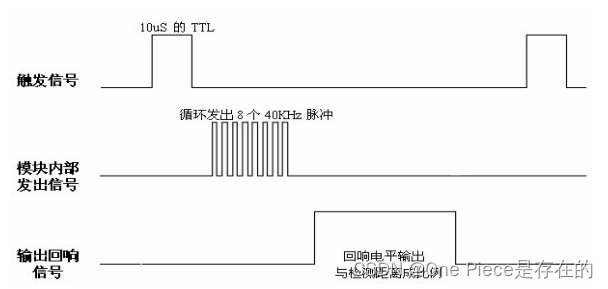
树莓派使用WiringPi库配合时间函数实现超声波测距
树莓派使用WiringPi库配合时间函数实现超声波测距 文章目录 树莓派使用WiringPi库配合时间函数实现超声波测距一、HR-04超声波模块原理1.1 超声波测距原理:1.2 超声波时序图: 二、树莓派与超声波模块硬件连接三、时间函数3.1 时间函数gettimeofday()原型和头文件: 四、实现超声波测距4.1 使用wiringOP库和时间函数实现超声波测距: 五、实现超声波测距
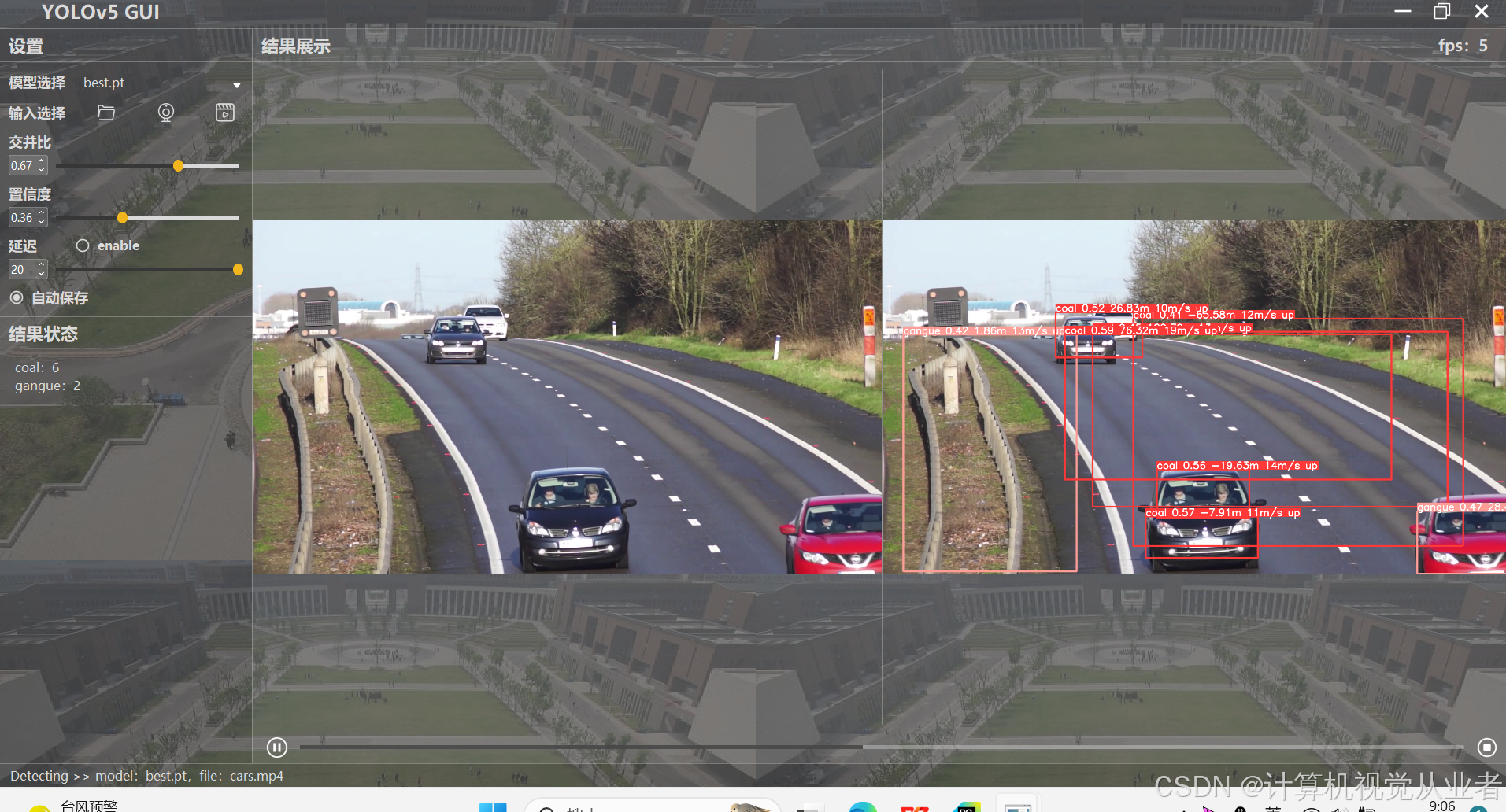
yolov5 +gui界面+单目测距 实现对图片视频摄像头的测距
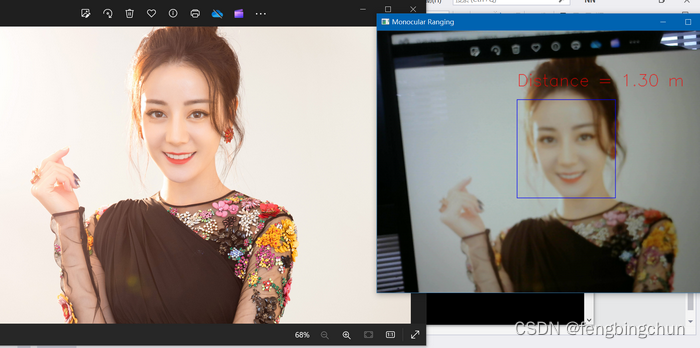
可实现对图片,视频,摄像头的检测 项目概述 本项目旨在实现一个集成了YOLOv5目标检测算法、图形用户界面(GUI)以及单目测距功能的系统。该系统能够对图片、视频或实时摄像头输入进行目标检测,并估算目标的距离。通过结合YOLOv5的强大检测能力和单目测距技术,系统能够在多种应用场景中提供高效、准确的目标检测和测距功能。 技术栈 YOLOv5:用于目标检测的深度学习模型。Open

ADAS---基于检测框的单目测距方法
1.1.模型求解法方法解读: Yolo模型可以输出被检测物体的置信度、类别及检测框的中心点坐标(xc,yc)及宽高(w,h)等信息,选取车辆检测框底部的中点作为距离测量的特征点,其计算公式如下: 车辆测距示意图如下: 图中,为相机靶面中心点,为相机光心,车载相机安装高度为 H,焦距为 f,俯仰角为β,为 γ,点与光轴投影的夹角为。为点到点的水平距离,;为点与图像中心点的垂直距离,。为

高速传输uwb无线收发芯片,超宽带、低时延无线通信,定位测距技术
在信息化的时代,无线通信技术的每一次创新都极大地推动了社会的发展。近年来,随着物联网、智能家居、自动驾驶等技术的飞速发展,对无线通信技术的要求也越来越高。在众多无线通信技术中,UWB(Ultra-Wideband)无线收发芯片以其超宽带、低时延的特性,成为了行业内的翘楚,飞睿智能创新着无线通信的新潮流。 一、UWB无线收发芯片:技术解读 UWB,即超宽带无线通信技术,是一种使用极短脉冲进行

SPR系列单点激光雷达测距传感器|模组之CAN-OPEN软件调试说明
SPR系列单点激光雷达测距传感器|模组利用激光束的时间飞行原理来测量距离。它们发射出一个脉冲激光,并测量激光从传感器发射到击中物体并返回的时间来计算距离。 SPR系列单点激光雷达测距传感器|模组在测量精度要求较高的应用中常被使用,应用范围广泛,可以用于距离测量、障碍物检测、定位导航、环境感知等诸多方面,为自动化、机器人技术和智能系统提供重要的数据支持。 SPR系列单点激光雷达测距传感器|模组,

SPR系列单点激光雷达测距传感器|模组的安装与联机接线方法
SPR系列单点激光雷达测距传感器|模组,支持0-10米测距,产品涵盖SPR0510100、SPR0510100、SPR05201、SPR0510100、 SPR0530100、SPR0550100、SPR0560100、 SPR1010100、SPR1020100、SPR1030100、SPR1050100、SPR1060100 等型号。 SPR系列单点激光雷达测距传感器|模组利用激光束的时

【Python】多线程后台监控鼠标键盘输入 绝地求生PUBG地图测距代码编写
【Python】多线程后台监控鼠标键盘输入 绝地求生PUBG地图测距代码编写 文章目录 Pynput模块绝地求生PUBG地图测距测试完整代码附录:列表的赋值类型和py打包列表赋值BUG复现代码改进优化总结 py打包 【Python】多线程后台监控鼠标键盘输入 绝地求生PUBG地图测距代码编写 PUBG后台地图测距程序 适用于所有地图迫击炮、归零点

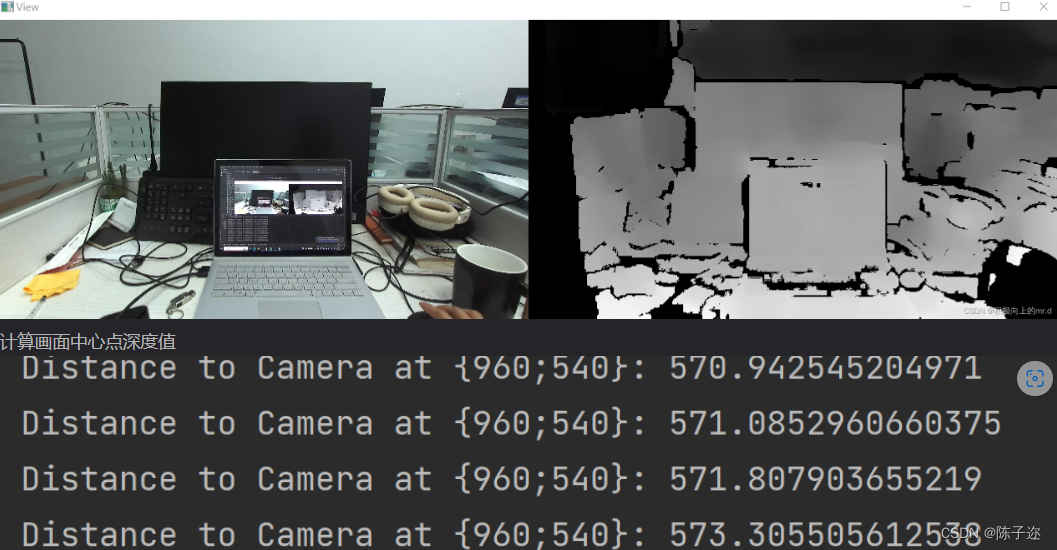
使用Zed 实现测距
目录 1. 导入相关库 2. 相机初始化设置 3. 获取中心点深度数据 4. 计算中心点深度值 5. 完整代码 此代码基于官方代码基础上进行改写,主要是获取zed相机深度画面中心点的深度值,为yolo测距打基础。 Zed相机是由Stereolabs公司开发的一种先进的立体视觉相机。这种相机专为计算机视觉和机器学习应用而设计,能够提供高质量的3D捕捉和分析功能。以下是Ze

摄像头测距原理与代码实现
外界3D影像投射到摄像头传感器的原理其实就是针孔成像原理。 针孔成像原理,如图所示: f为摄像头的焦距,c为镜头光心 模型的主要依据公式为f/d=h/H,设物体所在平面与相机平面的距离为d,物体实际高度为H,在传感器上的高度为h 根据这个模型,我们就能求出目标物体与我们的摄像头平面的距离。 分两种情况,但是这两种情况的条件都是假设实际物体与摄像机所在平面平行。 一种是

飞睿超宽带uwb模块无线传输,工业级uwb定位标签精度3厘米,测距定位距离150米
在当今日新月异的科技浪潮中,超宽带(Ultra-Wideband,简称UWB)技术凭借其独特的优势,正在成为工业应用领域中不可或缺的一环。作为一种新型的无线通信技术,超宽带UWB模块凭借其高精度定位、高安全性、高抗干扰性等特性,在工业环境中发挥着越来越重要的作用。本文将深入探讨UWB模块在工业应用方面的应用,以及它如何实现3cm精准定位精度以及测距功能,并展望其未来的发展趋势。 一、UWB技术概
基于stm32最小版的超声波测距模块
目录 一、模块准备 二、HC-SR04模块原理解释 三、程序完整代码 四、烧录结果 总结 一、模块准备 STM32F103C8T6 HC-SR04 ST-Link(其他烧录器也可以) 0.96寸OLED屏幕(非必须,仅供显示测距结果,可以使用串口助手代替) 若干杜邦线 二、HC-SR04模块原理解释 HC-SR04超声波测距模块提供2cm~400cm的测距功
我们如何收到卫星信号?(导航电文,载波与测距码)
卫星信号 在介绍所有卫星信号之前,首先要明确一些概念: 所有的卫星信号,都是一段电磁波,用户接收的,也是一段电磁波。 但是我们认知中的电磁波,就是一段波,就像我们打出去的交一样,怎么通过这一段波来转换成有用的数据呢? 首先,卫星发射信号的是计算机,接收机也是计算机,卫星发出信号,我们接收信号,接收的都是一段二进制01码,然后把01码进行转换。因为卫星不可能直接发出一串文字,而计算机就

红外超声波雷达测距(water)
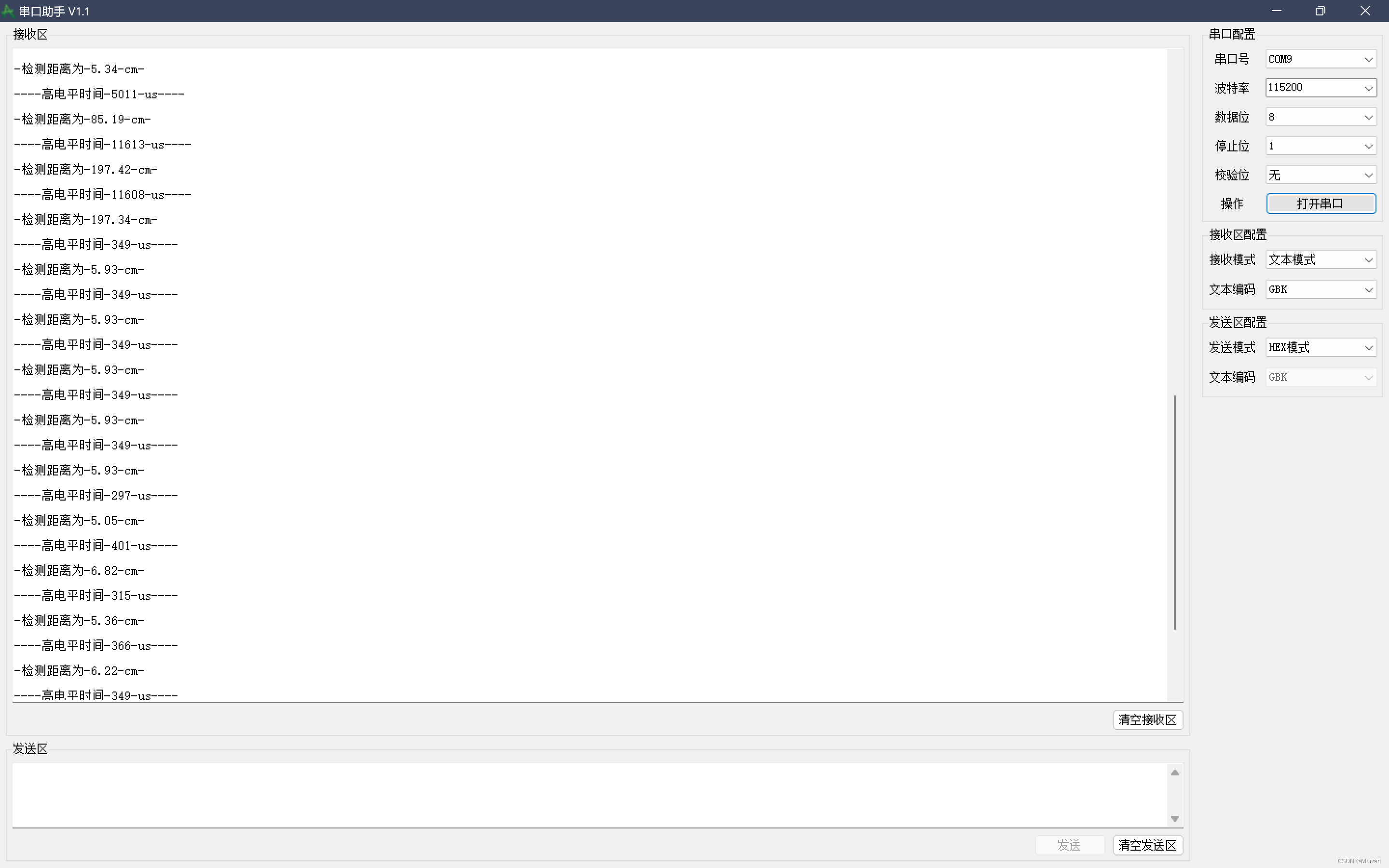
文章目录 一 RS-232二 RS485三 Modbus四 stm32多路超声波测距4.1 设计方案4.2 代码 参考资料总结 实验要求 一. 采用stm32F103和HC-SR04超声波模块, 使用标准库或HAL库+ 定时器中断,完成1或2路的超声波障碍物测距功能。 1)测试数据包含噪声,程序需要进行滤波处理;将测距数值通过串口上传到上位机串口助手; 2)根据障碍物距离远近,控

基于stm32和HC_SR04超声波模块的测距和报警
基于stm32和HC_SR04超声波模块的测距和报警 目录 **基于stm32和HC_SR04超声波模块的测距和报警****一.工作原理****二.功能实现****HC_SR04初始化和读取距离****使用呼吸灯表示距离远近****主函数编写** **三.效果****四.关于modbus和串口RS485****五.总结** 一.工作原理 (1)采用 IO 口 TRIG 触发测
单片机超声波测距+WTD588D语音播报的设计
第一章 绪论 1.1 课题设计目的及意义 1.1.1设计的目的 随着科学技术的快速发展,超声波在测距中的应用越来越广。但就目前的急速水平来说,人们可以具体利用的测距技术还十分有限,因此,这是一个正在蓬勃发展而又有无限前景的技术及产业领域。由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因此超声波经常用于距离测量,如超声波测距和物位测量等都可以通过超声波来实现。利用超声波检测往往比较
STM32F103C8T6 HC-SR04超声波模块——超声波障碍物测距(HAl库)
超声波障碍物测距 一、HC-SR04超声波模块(一)什么是HC-SR04?(二)HC-SR04工作原理(三)如何使用HC-SR04(四)注意事项 二、程序编写(一)CubeMX配置1.芯片选择2.配置RCC、SYS、时钟树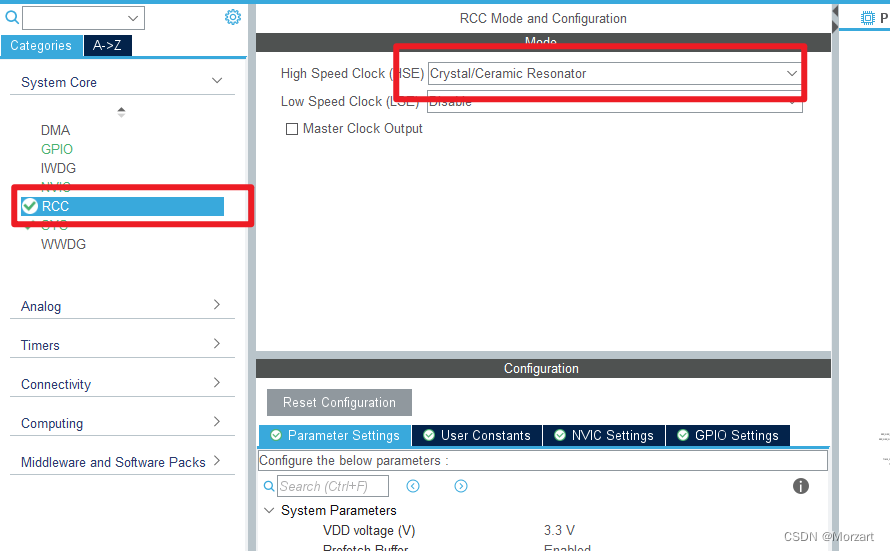3
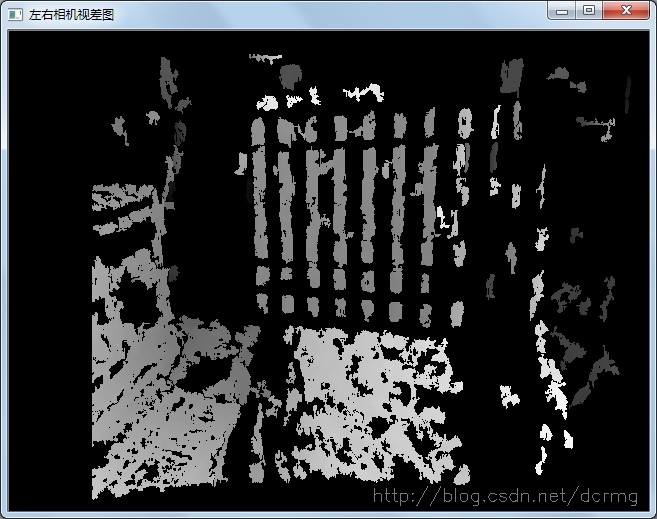
双目相机标定以及立体测距原理及OpenCV实现
单目相机标定的目标是获取相机的内参和外参,内参(1/dx,1/dy,Cx,Cy,f)表征了相机的内部结构参数,外参是相机的旋转矩阵R和平移向量t。内参中dx和dy是相机单个感光单元芯片的长度和宽度,是一个物理尺寸,有时候会有dx=dy,这时候感光单元是一个正方形。Cx和Cy分别代表相机感光芯片的中心点在x和y方向上可能存在的偏移,因为芯片在安装到相机模组上的时候,由于制造精度和组装工艺的影响,很难

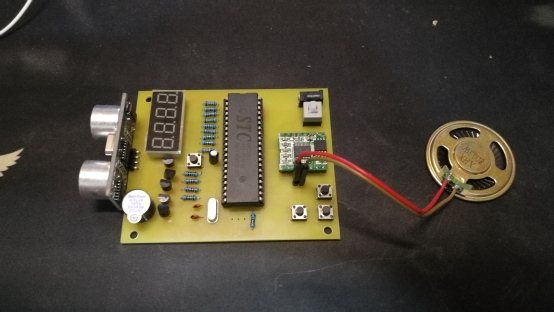
51单片机超声波测距_液位检测_温度检测原理图PCB仿真代码
目录 实物图: PCB 原理图 仿真图 编辑 程序 资料下载地址:51单片机超声波测距-液位检测-温度检测原理图PCB仿真代码 主控为stc89c52,通过ds18b20进行温度采集,超声波测距,距离不可以超过1m,通过按键可以设置距离上下限阈值 实物图: PCB 原理图 仿真图 程序 #define uchar unsign

使用YOLOv8 YOLOv5 进行距离测量,速度测量。使用目标检测进行测距,测速是如何实现的呢?
文章大纲 简介差帧算法(Frame Difference Algorithm) 目标检测测距使用YOLOv8 进行测距代码样例代码原理 目标检测测速使用YOLOv8 进行测速代码原理 参考文献综述 简介 导读 在精确检测车速车距的方案中,视觉方案是非常具有挑战性的,但由于没有昂贵的距离传感器而大幅降低成本,所以潜力巨大。本文综述了基于视觉的车辆速度、距离估计。并建立了

基于python与OpenCV的双目视觉匹配测距系统设计与实现
基于python与OpenCV的双目视觉匹配测距系统设计与实现 “Design and Implementation of a Stereoscopic Vision Matching and Distance Measurement System using Python and OpenCV” 完整下载链接:基于python与OpenCV的双目视觉匹配测距系统设计与实现 文章目录
Go实现树莓派超声波测距
后面发现调用的两个Go的库进行测算还是没办法读到好的超声波值, 所以放弃 公式 距离(cm)=((声速(m/s)×时间(ms))/ 2) *10 代码 ultrasonicSensor.go package mainimport ("context""errors""fmt""periph.io/x/conn/v3/gpio""periph.io/x/conn/v3/gpio/gp
超声波测距传感器--第七天
1.超声波测距 型号:HC-SR04 接线参考:模块除了两个电源引脚外,还有TRIG,ECHO引脚,这两个引脚分别接我们开发板的P1.5和P1.6端 超声波模块是用来测量距离的一种产品,通过发送超声波,利用时间差和声音传播速度,计算模块到前方障碍物的距离。 2. ·如何让它发送波: Trig端口,给Trig端口至少10us的高电平 ·如何知道开始发送波:
通过三角形相似原理实现单目测距
根据三角形相似原理计算相机焦距,公式为:F = (P * D) / W 其中: F: 待求的相机的焦距 P: 图像中目标的宽度,单位像素 D: 真实目标与相机的距离,单位厘米 W: 真实目标的宽度,单位厘米 计算焦距前,首先要有一幅带目标的图像,这里以人脸为例,记下采集此幅图像时,相机与人脸的实际距离D

通过MediaPipe+MiDaS实现人脸单目测距
MediaPipe:是Google开发的适用于直播和流媒体的开源、跨平台、可定制的机器学习解决方案。code地址:https://github.com/google/mediapipe ,最新发布版本v0.10.11,license为Apache-2.0。MediaPipe Solutions提供了一套库和工具,供你在应用程序中快速应用人工智能(AI)和机器学习(ML)技术,包括:目标

【HAL库 STM32】输入捕获并实现超声波测距
文章目录 HC-SR04 超声波模块简介HC-SR04 工作原理如何使用HC-SR04模块程序效果 一、工程配置代码如果您发现文章有错误请与我留言,感谢 HC-SR04 超声波模块简介 HC-SR04 工作原理 模块有2个超声波换能器(如图所示),一个发出声波,另一个接收物体反射回来的声波,这中间所经过的时间即声波传播的时间,再结合声速就能计算出: 距离 = 声速 * 时