解算专题

基于EKF的姿态解算
首先一个最为基本的公式(我去,怎么编写公式啊?):; 其中;。 由此,我们可以得出状态方程:step1: ,。 计算协方差矩阵 step2: ; Q 为过程噪声。

通用高电子迁移率晶体管(HEMT)的差分微变解算方案及分析型模型
来源:A Difference-Microvariation Solution and Analytical Model for Generic HEMTs(TED 22年) 摘要 这篇论文提出了一种AlGaN/GaN和AlGaAs/GaAs基高电子迁移率晶体管(HEMT)的分析型直流模型。该模型考虑了高栅偏压下势垒层中积累的电荷。为了突破准确高效求解模型的瓶颈问题,作者开发了一种改进的差分微

mpu6050姿态解算与卡尔曼滤波(5)可应用于51单片机的卡尔曼滤波器
博客4中给出的滤波器状态维数为4维,测量量为3维,每次滤波需要做不少矩阵乘法和求逆运算。如果想在51单片机上实现,计算耗时会比较长。考虑应用场合可以对滤波器适当做一些简化,计算量会大大减小。 首先,陀螺和加速度计融合只能保证俯仰和滚转角收敛,而且从测量方程来看,加速度计的测量只与俯仰和滚转角有关。因此可以考虑滤波器状态选取为俯仰角 θ \theta θ和滚转角 γ \gamma γ,这样状态维数会
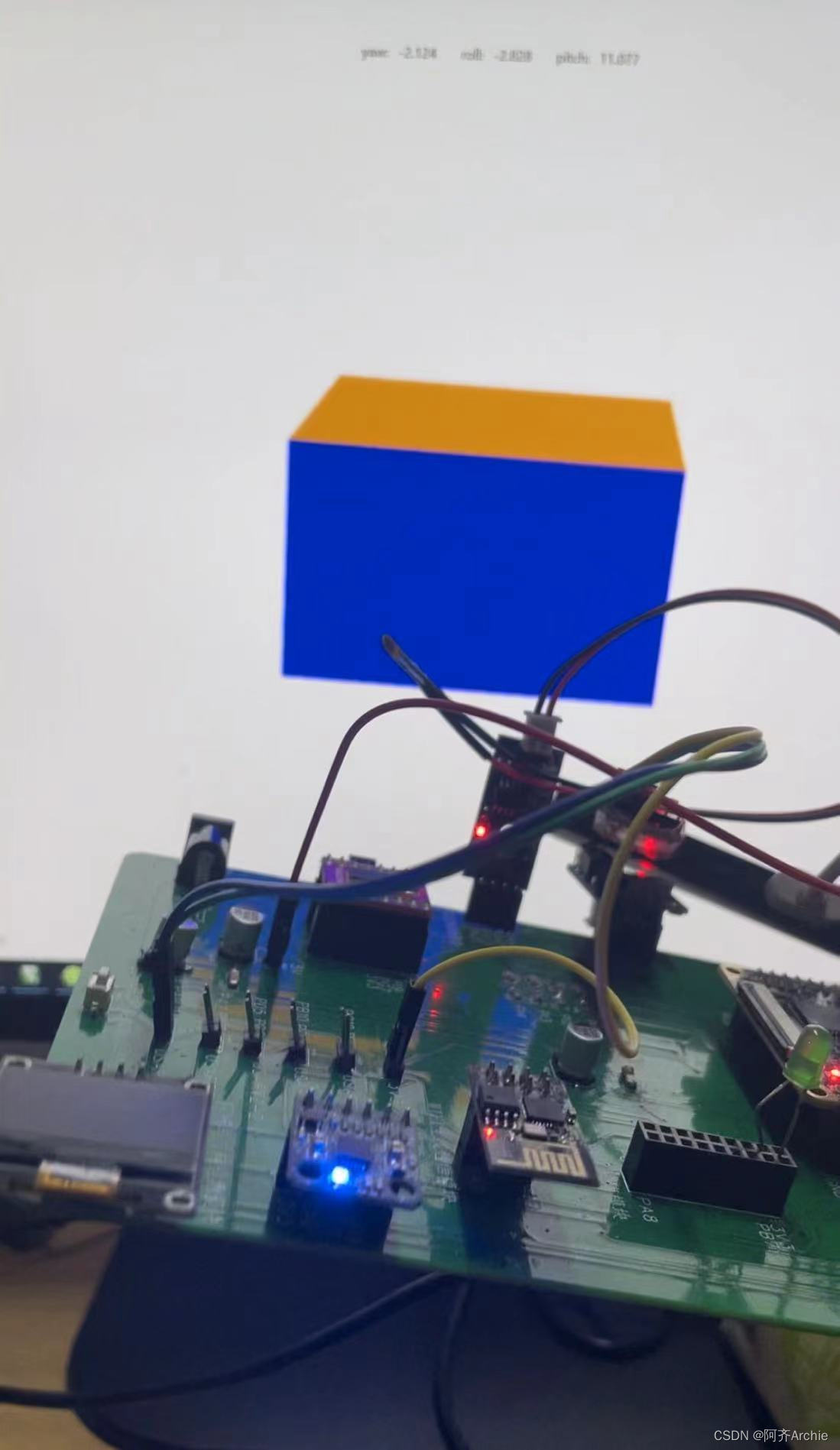
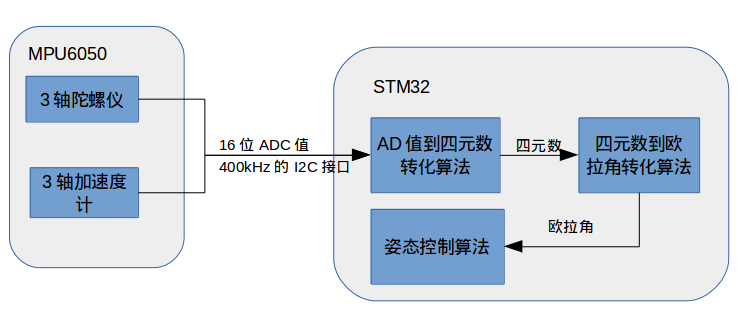
【无人机/平衡车/机器人】详解STM32+MPU6050姿态解算—卡尔曼滤波+四元数法+互补滤波(文末附3个算法源码)
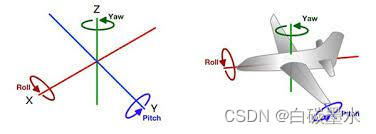
效果: MPU6050姿态解算-卡尔曼滤波+四元数+互补滤波 目录 基础知识详解 欧拉角
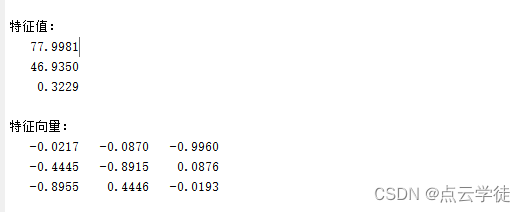
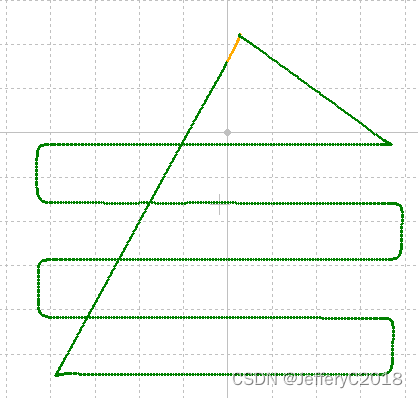
MATLAB 构建协方差矩阵,解算特征值和特征向量(63)
MATLAB 局部点云构建协方差矩阵,解算特征值和特征向量(63) 一、算法介绍二、算法实现1.代码2.结果 一、算法介绍 对于某片有待分析的点云,我们希望构建协方差矩阵,计算特征值和特征向量,这是很多算法必要的分析方法,这里提供完整的计算代码(验证正确) !!! 特别需要注意的是:特征值的排序方式 这里计算的特征值按照从小到大的顺序重新排列得到:L1 > L2 >

基于JGraphX的通风网络解算---通风网络解算中出现风量为负值的处理
在通风网络计算中,如果风流的方向与分支的方向相反时,会出现风量解算结果为负数的情况,此时需要做相应的处理。 <pre name="code" class="java"> if(ve.getAirQ()<0){Node bn = (Node) c.getSource().getValue();
【姿态】姿态解算学习笔记(1) 总纲思考
0. 目录 文章目录 0. 目录1. 起因2. 名词解释3.个人理解参考链接系列文章 1. 起因 读研的时候,当时有在汉王实习,做一款云笔(其实观点很超前,想用消费级的mems9轴传感器+光流来识别毫米级别的位移),最后毕业的时候项目也没结,倒是和刘老每周见面混的面熟。当时是初次接触到了姿态解算相关的知识。 后来在自动化专业,又接触了无人机的一些东西,又涉及到了这部分。 本来以
rtklib进行PPK解算
使用RTKLIB_bin-rtklib_2.4.3, 打开RTKPOST。 配置相关文件的路径,如果没有广播星历,则到武汉大学IGS数据中心 下载。 打开Options,进行配置。 点击执行 解算中 查看成果
姿态传感器MPU6050模块的姿态解算
姿态传感器 姿态传感器是基于MEMS技术的高性能三维运动姿态测量系统。它包含三轴陀螺仪、三轴加速度计,三轴电子罗盘等运动传感器,通过内嵌的低功耗ARM处理器得到经过温度补偿的三维姿态与方位等数据,比如角速度,加速度,磁数据等。利用基于四元数的三维算法和特殊数据融合技术,实时输出以四元数、欧拉角表示的零漂移三维姿态方位数据。姿态传感器可广泛嵌入到航模无人机,机器人,机械云台,车辆船舶,地面及水下

加速度计与陀螺仪数据融合解算姿态
加计和陀螺仪都能计算出姿态,但为何要对它们融合呢,是因为加速度计对振动之类的扰动很敏感,但长期数据计算出的姿态可信,而陀螺仪虽然对振动这些不敏感,但长期使用陀螺仪会出现漂移,因此我们要进行互补,短期相信陀螺,长期相信加计。不过,其实加计无法对航向角进行修正,修正航向角需要磁力计,也就是下次要总结的9轴数据融合。 在融合之前先要对传感器原始数据进行一些处理。理想情况下,加速度计水平放置时,XY轴应

姿态解算知识点4——挥动方向和大小
1.目标 手势挥动的方向α,-180°~ 180°挥动力度大小intensity,0~10 2.已知量 欧拉角pitch,roll,yaw地理坐标系的角速度 pitch_rate, roll_rate,yaw_rate 3.运动模型 目标体在空中挥动模型可以这样定义,把三维空间模型简化为二维空间模型,我们可以把目标体当做一个点,运动的空间当做一个XY二维坐标系,接下来我们只要分析这个点在

姿态解算知识点2——欧拉角微分方程求解角速度
1.目标 地理坐标系的角速度 2.已知量 机体坐标系的角速度 gyro_x, gyro_y,gyro_z;欧拉角,pitch,roll,yaw,参考我的上一章节姿态解算知识点1——四元数互补滤波 3.算法总框图 4.数学模型和公式推导 这里坐标系取东北天 --- 右前上 由以上求得地理坐标系的角速度为: 5.代码实现 欧拉角微分方程算法代码 6.

姿态解算知识点1——四元数互补滤波求解欧拉角
1.目标 求四元数q0、q1、q2、q3; 求解飞行器、机器人的欧拉角pitch、roll、yaw; 2.算法总框图 3.四元数数学模型及公式推导 上面的b系就是机体坐标系,R系可以认为是导航坐标系(即地理坐标系n)。 4. 四元数更新代码实现 /*******************************************
matlab读取gamit解算的met文件,获取ZTD、ZWD、PWV、ZHD等数据(附matlab代码)
0. 码字不易,点赞加关注(公众号:WZZHHH,后期代码将在公众号可以下载),使用请注明出处(根据我的研究方向,我会不断更新代码)。 1. 读取gamit解算的met文件,根据前缀met_读取相应文件下met文件,met文件的列分别为1为year、2为doy(年积日)、3为小时、4为分钟、5为秒、6为ZTD、7为ZWD、8不知道、9为PWV、11为气压、12为温度、13为ZHD。 2

移动端或游戏布料的解算
衣料模拟实现方案 衣料模拟方面,像 里面有三种对布料的仿真,一种是物理骨骼,一种是物理骨骼的布料,一种是最好效果的布料。市面上已有的游戏:对于移动端unity magica cloth 说是性能更优长裙说是现在都难的,一般的衣服会好一些,(市场上有做的不太好的做法,就是为了衣服居然添加不少约束来限制人的运动)看了一下现在的基本上都是飘飘然的感觉是有,但是要能容忍一定程度的穿模。这里通过unity
基于一阶互补滤波的MPU6050姿态解算
之前报名了第十八届全国大学生智能车竞赛的单车越野组别,但由于种种原因最终未能完赛。所以打算把自己做好的一部分发出来,希望对往后的刚参加竞赛的同学们有所帮助,同时也是对自己过去一个多学期生活的一点总结。由于学疏才浅,如有不准确或者错误的地方,还请不吝赐教。 代码基于逐飞科技的CH32V307开源库。 为什么需要一阶互补滤波 当我们通过MPU6050进行姿态解算时,MPU6050给了我们
全站仪角度定向,极坐标解算
Sub 导入全站仪数据() Dim Filename As Variant, myText, S, mArr() As String, narr() As String Dim i, y As Long, j As Long Filename = ThisWorkbook.Path & "\1112X.GT7" '指定文件字符串 j = 1 Wit
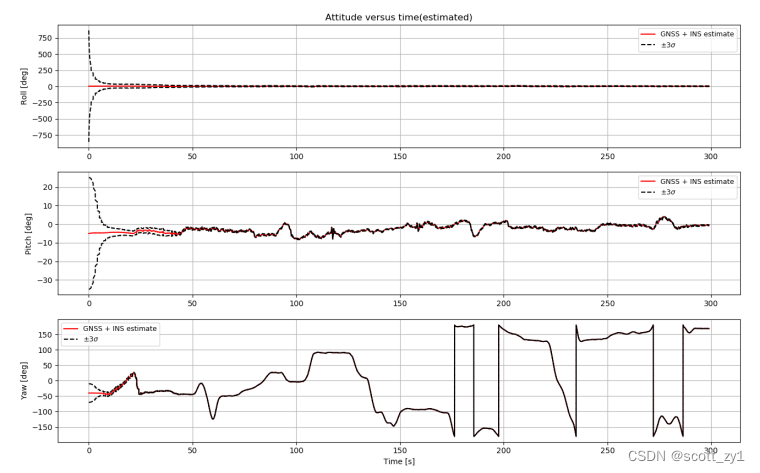
INS/GNSS组合导航(十)松耦合捷联车载定位解算示例
1.摘要 基于GNSS信号辅助IMU实现车载导航,可有效规避IMU积分误差累积效应及GNSS信号丢失导致位姿解算失准的问题,为此本文引入结合GNSS与IMU的松组合融合定位计算方法实现低成本车载IMU传感器的准确定位. 2.算法实现 2.1流程图 基于融合的INS/GNSS组合导航方法 实现位姿解算(求解PVA)的流程图如下。 2.2算法实现 2.2.1主要坐
陀螺仪LSM6DSV16X与AI集成(2)----姿态解算
陀螺仪LSM6DSV16X与AI集成.2--姿态解算 概述视频教学样品申请完整代码下载欧拉角万向节死锁四元数法姿态解算双环PI控制器偏航角陀螺仪解析代码上位机通讯加速度演示陀螺仪工作方式主程序演示 概述 LSM6DSV16X包含三轴陀螺仪与三轴加速度计。 姿态有多种数学表示方式,常见的是四元数,欧拉角,矩阵和轴角。他们各自有其自身的优点,在不同的领域使用不同的表示方式。在四轴飞行
陀螺仪LSM6DSV16X与AI集成(2)----姿态解算
陀螺仪LSM6DSV16X与AI集成.2--姿态解算 概述视频教学样品申请完整代码下载欧拉角万向节死锁四元数法姿态解算双环PI控制器偏航角陀螺仪解析代码上位机通讯加速度演示陀螺仪工作方式主程序演示 概述 LSM6DSV16X包含三轴陀螺仪与三轴加速度计。 姿态有多种数学表示方式,常见的是四元数,欧拉角,矩阵和轴角。他们各自有其自身的优点,在不同的领域使用不同的表示方式。在四轴飞行

GNSS精密解算软件介绍
GAMIT: 美国麻省理工学院(MIT)和加州大学圣地亚哥分校的海洋研究所(SIO)开发的GAMIT/GLOBK软件, GAMIT为双差网解,利用双差直接消除卫星及测站的时间误差。 gamit软件介绍-周命端: gamit软件介绍-周命端 - 360文库 gamit官方网站:GAMIT/GLOBKhttp://geoweb.mit.edu/gg/gamit解算国内博主: 科学网—Gami

IMU惯性里程计解算(附代码实现)
一、系统概述 IMU是机器人常用的传感器之一,IMU对机器人的定位功能实现非常重要,其优点在于是内源传感器对外部环境变化不明显,输出频率高,缺点在于存在累积误差。本文主要记录一下在机器人定位中对IMU的使用和对惯性导航里程计的理解和实现。 本文代码主要依赖于ROS相关库实现,源代码见:GitHub - Abin1258/imu_to_odom: imu odometry 1.系统输入:IMU
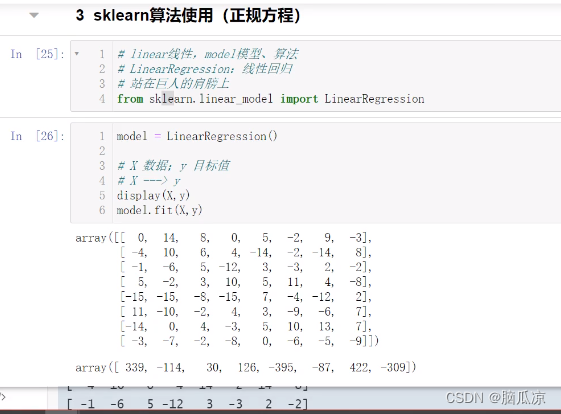
人工智能基础_机器学习003_有监督机器学习_sklearn中线性方程和正规方程的计算_使用sklearn解算八元一次方程---人工智能工作笔记0042
然后我们再来看看,如何使用sklearn,来进行正规方程的运算,当然这里 首先要安装sklearn,这里如何安装sklearn就不说了,自己查一下 首先我们还是来计算前面的八元一次方程的解,但是这次我们不用np.linalg.solve这个 解线性方程的方式,也不用 直接 解正规方程的方式: 也就是上面这种方式,使用的是正规方程的形式.这个公式 实现的,那么我们接下来,使用另

使用C++或者js求空间点到直线垂足坐标的解算方法
原文章地址为:https://blog.csdn.net/zhouschina/article/details/14647587 假设空间某点O的坐标为(Xo,Yo,Zo),空间某条直线上两点A和B的坐标为:(X1,Y1,Z1),(X2,Y2,Z2),设点O在直线AB上的垂足为点N,坐标为(Xn,Yn,Zn)。点N坐标解算过程如下: 首先求出下列向量: 由向量垂直关系,两个向量如果垂直,那么两