本文主要是介绍姿态解算知识点2——欧拉角微分方程求解角速度,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1.目标
- 地理坐标系的角速度
2.已知量
- 机体坐标系的角速度 gyro_x, gyro_y,gyro_z;
- 欧拉角,pitch,roll,yaw,参考我的上一章节姿态解算知识点1——四元数互补滤波
3.算法总框图

4.数学模型和公式推导
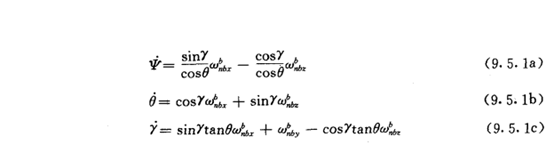
这里坐标系取东北天 --- 右前上

由以上求得地理坐标系的角速度为:
5.代码实现
欧拉角微分方程算法代码
6.数据曲线
- 地理坐标系角度速率曲线效果图

红色曲线-pitch_rate
绿色曲线- roll_rate
棕色曲线- yaw_rate
7.参考文献
- 惯性导航——秦永元
- 惯性导航基本原理——刘保中
这篇关于姿态解算知识点2——欧拉角微分方程求解角速度的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!