本文主要是介绍【无人机/平衡车/机器人】详解STM32+MPU6050姿态解算—卡尔曼滤波+四元数法+互补滤波(文末附3个算法源码),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
![]()
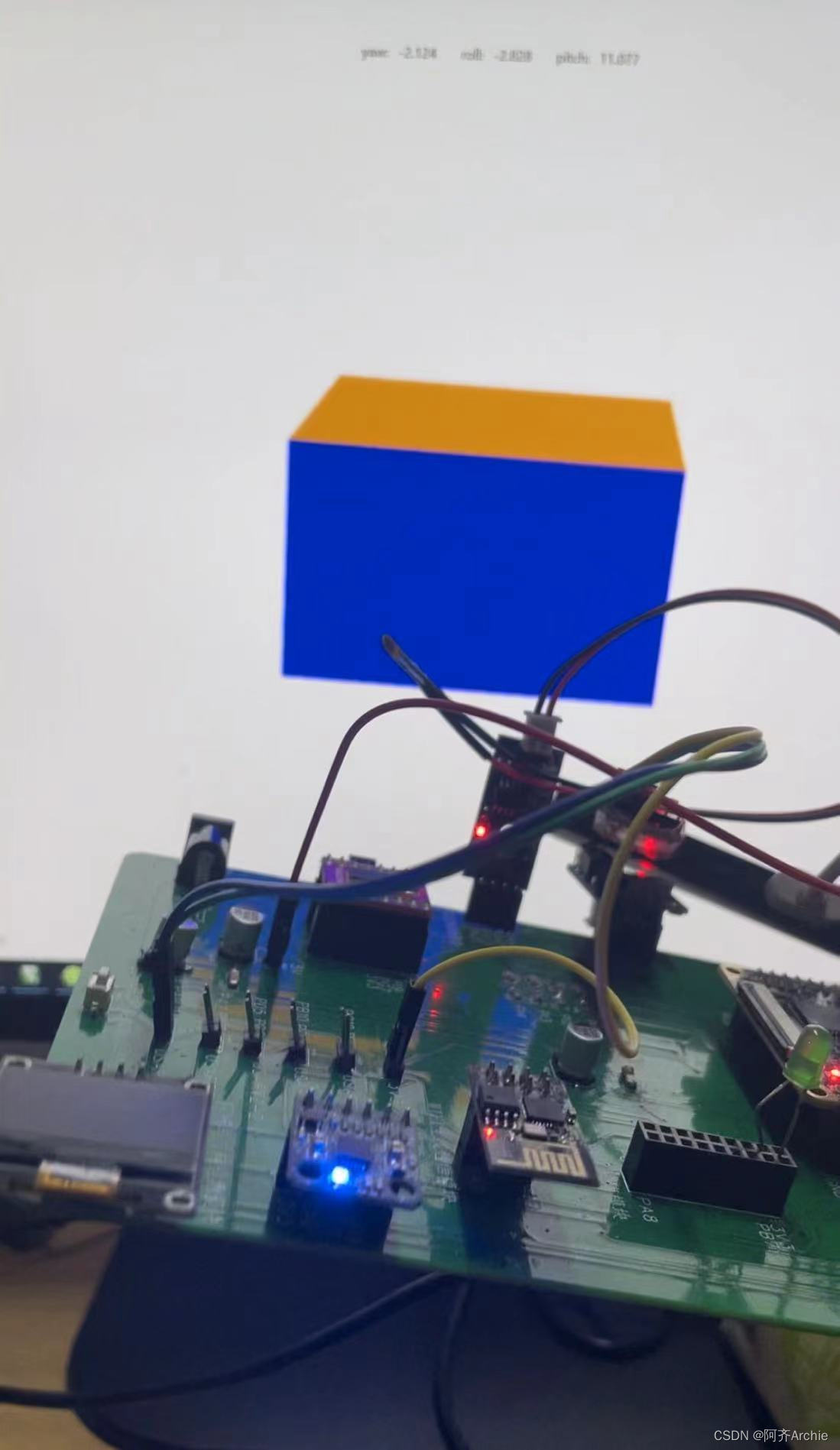
效果:
MPU6050姿态解算-卡尔曼滤波+四元数+互补滤波
目录
基础知识详解
欧拉角
这篇关于【无人机/平衡车/机器人】详解STM32+MPU6050姿态解算—卡尔曼滤波+四元数法+互补滤波(文末附3个算法源码)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!
本文主要是介绍【无人机/平衡车/机器人】详解STM32+MPU6050姿态解算—卡尔曼滤波+四元数法+互补滤波(文末附3个算法源码),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
![]()
效果:
MPU6050姿态解算-卡尔曼滤波+四元数+互补滤波
目录
基础知识详解
欧拉角
这篇关于【无人机/平衡车/机器人】详解STM32+MPU6050姿态解算—卡尔曼滤波+四元数法+互补滤波(文末附3个算法源码)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!
http://www.chinasem.cn/article/905811。
23002807@qq.com








