mpu6050专题

电赛2024年H题智能小车基于MSPM0G3507主控MCU(利用8路灰度加上MPU6050的解决方式)具体项目报告
题目:自动行驶小车(H题) 摘要 本项目由微处理器MSPM0G3507,编码器电机驱动,8路灰度传感器指示线巡线单元,MPU6050六轴传感器无线直行单元,OLED显示人机互动单元,红色LED及蜂鸣器声光提示单元构成。系统运行由两部分组成:自动行驶小车的无指示线直行控制部分和有指示线弯道行驶的实时转向控制部分,小车的无指示线直行控制部分,由MPU6050六轴传感器获得小车姿态的偏航角,通过获得

电赛2024年H题智能小车基于MSPM0G3507主控MCU(利用8路灰度加上MPU6050的解决方式)
一.前言 前段时间,激烈的电赛刚刚结束,很荣幸啊,也是十分的不甘心,本次的湖北赛区H题只拿到了一个省二,看最终的排名,在H题中我们离省一也就差几名。但是整个比赛已经过去了,现在不甘与不舍,也没有任何意义了,只有接收这一现实了。 当时我们整个比赛要求一二三都完美完成,要求四能够十分稳定的跑下来但是跑完四圈得花1分30秒,大概是跑十次才死一两次的样子(毕竟比赛,谁也

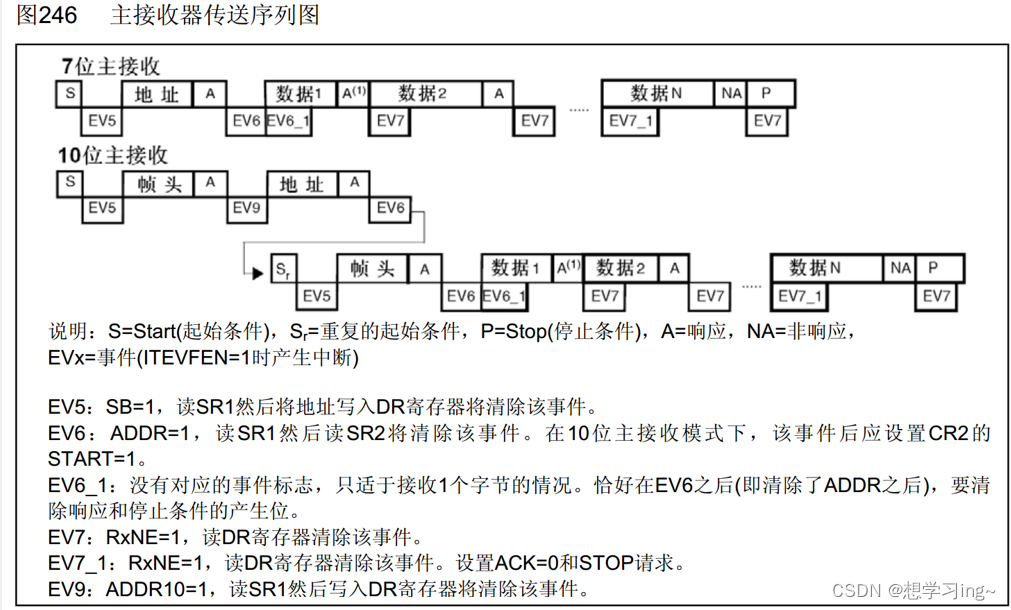
江协科技stm32————10-5 硬件I2C读写MPU6050
步骤 一、配置I2C外设,对I2C2外设进行初始化(MyI2C_Init) 开启I2C外设和对应的GPIO口的时钟把I2C对应的GPIO口初始化为复用开漏模式使用结构体配置I2CI2C_Cmd,使能I2C I2C_GenerateSTART //生产起始条件 I2C_GenerateSTOP //生产终止条件 I2C_AcknowledgeConfig

STM32标准库HAL库——MPU6050原理和代码
目录 陀螺仪相关基础知识: 加速度计,陀螺仪的工作原理: 陀螺仪再智能车中的应用: MPU6050原理图和封装图: 硬件IIC和软件IIC的区别: 相同点 不同点 常规获取陀螺仪数据: 标准库: MyI2C.c MyI2C.h MPU6050.c MPU6050.h MPU6050_Reg.h HAL库: 硬件IIC i2c.c: i2c.h mpu6050.
stm32学习-硬件I2C读取MPU6050
配置流程 第一步:配置I2C外设,对I2C外设进行初始化(替换上一篇文章的I2C_Init) 第二步:控制外设电路,实现指定地址写的时序(替换上一篇文章的WriteReg) 第三步:控制外设电路,实现指定地址读的时序(替换上一篇文章的ReadReg) 接下来我们就根据上述流程开始分析吧! 接线 SCLPB10SDAPB11 硬件I2C配置 初始化 1.开启I2C外设和GPIO

硬件I2C读写MPU6050
硬件I2C读写MPU6050 SCL接PB10,SDA接PB11,但是硬件I2C引脚不可以任意指定。 查询引脚定义表,来规划引脚。但由于PB6,7,8,9被OLEDz占用,不方便接线了。 可以使用I2C2引脚,但必须是SCL对应PB10,SDA对应PB11,两者不能互换。 根据结构图我们可以使用库函数对MPU6050进行初始化,初始化步骤为: 1.开启I2C外设和GPIO口的时钟 2
ROS2进阶 -- 硬件篇第五章第三节 -- PlateFormIO使用开源库驱动IMU——MPU6050
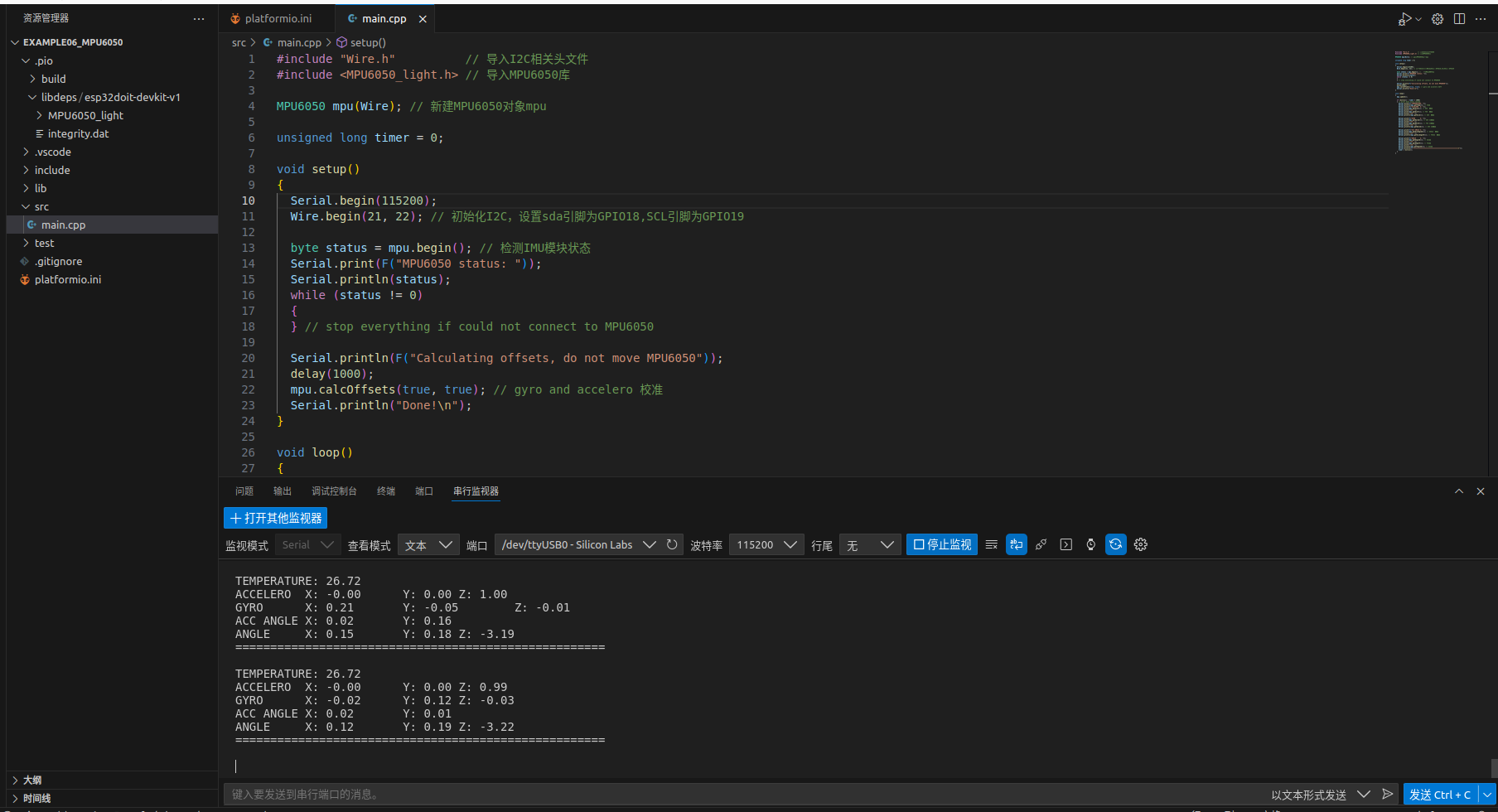
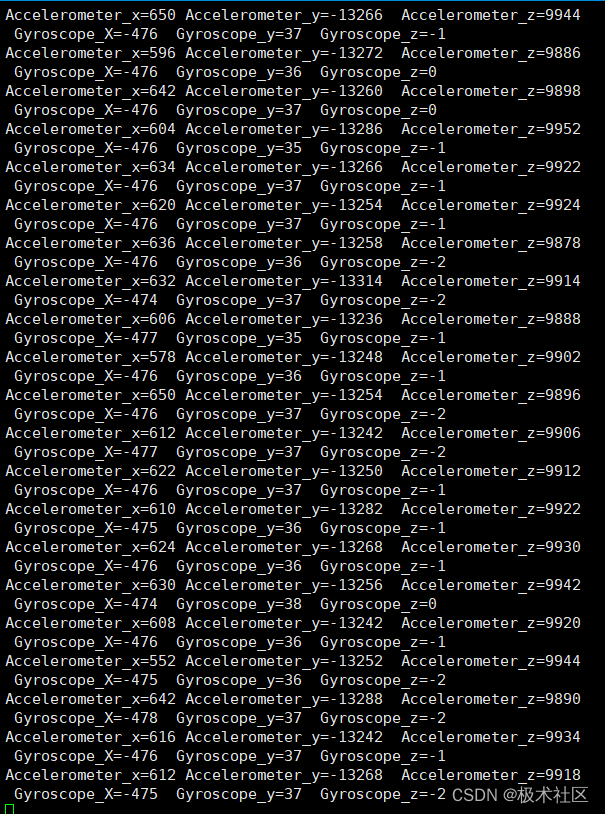
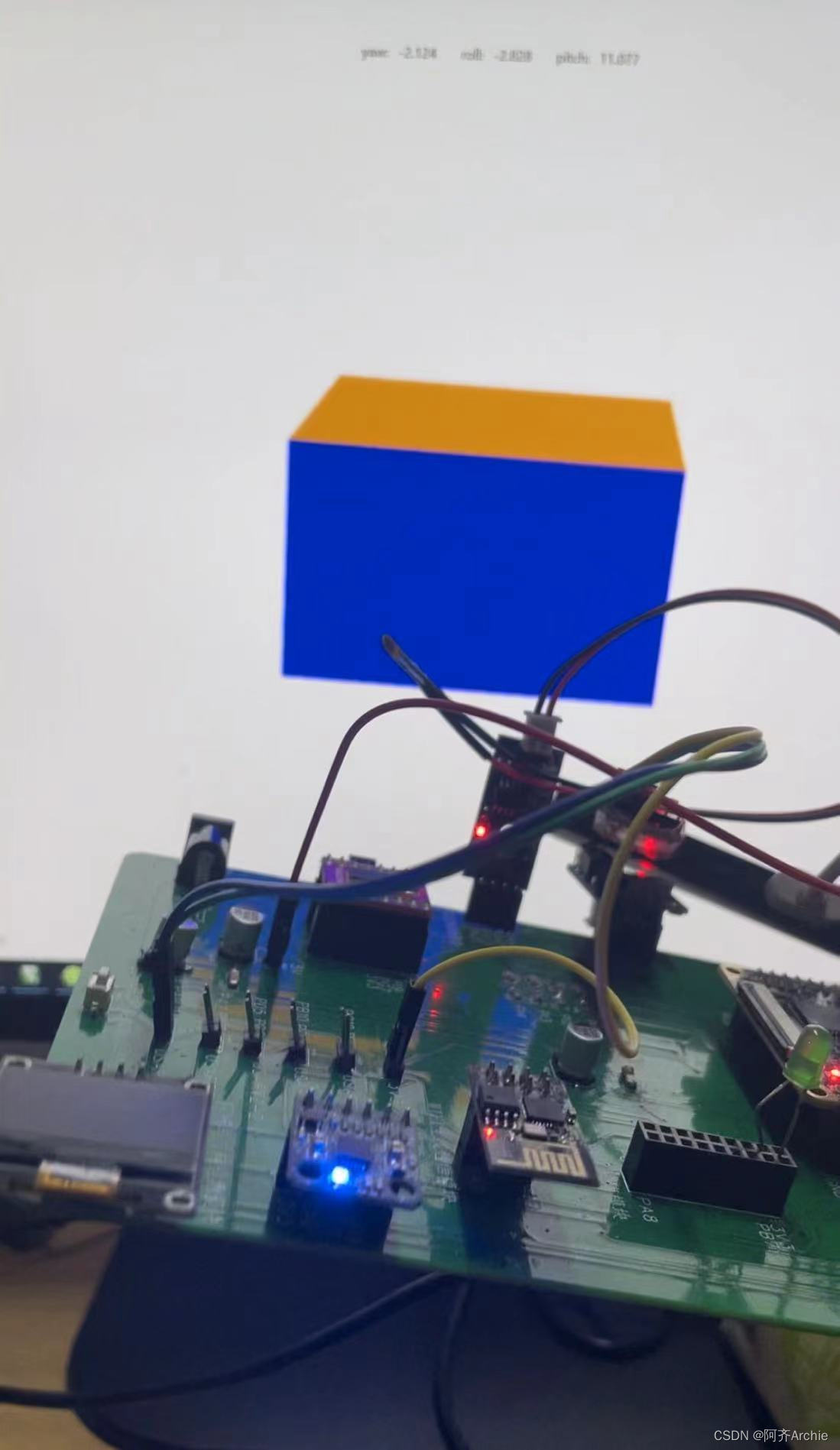
序: 上一节我们安装好了MPU6050的三方库,这一节我们尝试使用该库通过esp32将IMU模块驱动起来。 参考资料:小鱼——使用开源库驱动IMU 一、使用开源库驱动IMU 1. MPU6050介绍 首先我们了解下MPU6050模块,从外观看,长这个样子 MPU6050 为全球首例集成六轴传感器的运动处理组件,内置了运动融合引擎,用于手持和桌面的应用程序、游戏控制器、体感遥控以及其他消费

C语言 | 基于MPU6050的卡尔曼滤波算法(代码类)
博主github:https://github.com/MichaelBeechan 博主CSDN:https://blog.csdn.net/u011344545 //float gyro_m:陀螺仪测得的量(角速度)//float incAngle:加计测得的角度值#define dt 0.0015//卡尔曼滤波采样频率#define R_angle

C语言 | 基于卡尔曼滤波器的角度测量仪(MPU6050)
========================================== 博主github:https://github.com/MichaelBeechan 博主CSDN:https://blog.csdn.net/u011344545 ========================================== 本文设计了一种基于STM32/51单片机的使用MPU605
C语言 | 基于STM32的MPU6050模块程序(主程序)
=========================================================== github:https://github.com/MichaelBeechan CSDN:https://blog.csdn.net/u011344545 ===========================================================

AVR128驱动MPU6050
寄存器上面有寄存器操作的地址和寄存器号,找到地址才可以操作寄存器 WHO_AM_I中的内容是MPU-60X0的6位I2C地址 上电复位的第6位到第1位值为:110100 为了让两个MPU-6050能够连接在一个I2C总线上,当AD0引脚逻辑低电平时,设备的地址是 b1101000 ,当AD0引脚逻辑高电平时,设备的地址是 b1101001 PS:很多人在MPU6
《XR806开发板试用》硬件IIC驱动MPU6050
1.环境配置 总结一下遇到的问题: 1.需要修改配置文件中的文件路径 2.固件编译出现以下问题时,需要修改文件内容 2.工程目录结构 device/xradio/xr806/ohosdemo/car_demo └── src #源文件 └── main.c #主函数 └── mpu6050.c #驱动代码 └── include #头文件 └── mpu6050.h #驱动头文件 └

mpu6050姿态解算与卡尔曼滤波(5)可应用于51单片机的卡尔曼滤波器
博客4中给出的滤波器状态维数为4维,测量量为3维,每次滤波需要做不少矩阵乘法和求逆运算。如果想在51单片机上实现,计算耗时会比较长。考虑应用场合可以对滤波器适当做一些简化,计算量会大大减小。 首先,陀螺和加速度计融合只能保证俯仰和滚转角收敛,而且从测量方程来看,加速度计的测量只与俯仰和滚转角有关。因此可以考虑滤波器状态选取为俯仰角 θ \theta θ和滚转角 γ \gamma γ,这样状态维数会
【无人机/平衡车/机器人】详解STM32+MPU6050姿态解算—卡尔曼滤波+四元数法+互补滤波(文末附3个算法源码)
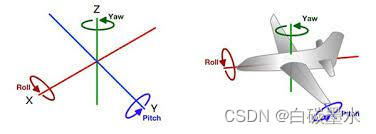
效果: MPU6050姿态解算-卡尔曼滤波+四元数+互补滤波 目录 基础知识详解 欧拉角
【TOLIN】第三章|驱动MPU6050传感器
TOLIN】第三章|驱动MPU6050传感器 作者:Tkwer 公众号:Tkwer望远镜 MPU6050 9轴运动处理传感器? MPU-6000(6050)为全球首例整合性6轴运动处理组件,相较于多组件方案,免除了组合陀螺仪与加速器时间轴之差的问题,减少了大量的封装空间。当连接到三轴
STM32学习笔记(10_2)- I2C通信协议MPU6050简介
无人问津也好,技不如人也罢,都应静下心来,去做该做的事。 最近在学STM32,所以也开贴记录一下主要内容,省的过目即忘。视频教程为江科大(改名江协科技),网站jiangxiekeji.com 本期开始学习 I2C通信,会分两大块来介绍,第一块, 就是介绍协议规则,然后用软件模拟的形式来实现协议;第二块, 就是介绍STM32的 I2C外设, 然后用硬件来实现协议。 I2C:高位先行,只有在

MPU6050基本读写和移植DMP读出三轴
文章目录 引言简述一下mpu6050和stm32的一些坑吧MPU6050 I2C读写MPU6050 初始化读取内部温度传感器读取陀螺仪DMP的移植读取三轴角度结语 引言 最近玩了IMU模块,看了很多的博客,从无到有。包含了一些我调试代码的过程,分享一些坑吧, 很多都是读不出来啥的,其实模块一般没啥问题,我会一步一步地教大家怎么排除常见问题。 我是参考正点原子的代码,因为他们没教

stm32f4硬件IIC读取MPU6050数据
stm32f4硬件IIC读取MPU6050数据 ** JY901B 串口10轴加速度计 MK695** stm32f4“硬件协议”方式,STM32 的I2C 片上外设专门负责实现I2C 通讯协议,只要置好该外设,它就会自动根据协议要求产生通讯信号,收发数据并缓存起来,CPU 只要检测该外设的状态和访问数据寄存器,就能完成数据收发。这种由硬件外设处理I2C 协议的方式减轻了CPU 的
姿态传感器MPU6050模块的姿态解算
姿态传感器 姿态传感器是基于MEMS技术的高性能三维运动姿态测量系统。它包含三轴陀螺仪、三轴加速度计,三轴电子罗盘等运动传感器,通过内嵌的低功耗ARM处理器得到经过温度补偿的三维姿态与方位等数据,比如角速度,加速度,磁数据等。利用基于四元数的三维算法和特殊数据融合技术,实时输出以四元数、欧拉角表示的零漂移三维姿态方位数据。姿态传感器可广泛嵌入到航模无人机,机器人,机械云台,车辆船舶,地面及水下

姿态传感器MPU6050模块之陀螺仪、加速度计、磁力计
MEMS技术 微机电系统(MEMS, Micro-Electro-Mechanical System),也叫做微电子机械系统、微系统、微机械等,指尺寸在几毫米乃至更小的高科技装置。微机电系统其内部结构一般在微米甚至纳米量级,是一个独立的智能系统。 微机电系统是在微电子技术(半导体制造技术)基础上发展起来的,融合了光刻、腐蚀、薄膜、LIGA、硅微加工、非硅微加工和精密机械加工等技术制作的高科技电

姿态传感器MPU6050模块的基本使用总结
以下两篇文章可作为参考: 姿态传感器MPU6050原理及应用超详细讲解 - 采芯网 基于STM32的四旋翼无人机项目(二):MPU6050姿态解算(含上位机3D姿态显示教学)-CSDN博客 基本介绍 随着科技的发展,我们经常看到有人用平衡车代步、使用无人机进行航拍。但这些是怎么实现的呢?平衡车和无人机在使用的时候是怎样保持平衡与稳定的呢? 其实,平衡车和无人机在内部都用到陀螺仪传感器和

zigbee CC2530读取MPU6050的方法及代码
前段时间由于项目需要,需要使用cc2530通过IIC读取MPU6050的数据。发现网上并没有代码,很多帖子都不是大家需要的,所以我想把我的cc2530驱动MPU6050的代码粘出来与大家共同学习。我的项目是驱动MPU6050通过zigbee无线传输至协调器。下图是我使用的硬件,看看是否一致,不同的话可能帮不到您。 GY521点击检查传感器是否一致 名称 MPU-6

nRF52832-Bluefruit52学习之外设开发(1)-- MPU6050六轴模块
nRF52832技术交流群:680723714 nRF52832-Bluefruit52核心板详细介绍: https://blog.csdn.net/solar_Lan/article/details/88688451 nRF52832驱动MPU6050
STM32F103C8驱动MPU6050姿态与tofsense报警 (六)
主函数 int main(void) { //RCC_Configuration(); //时钟设置 //BUZZER_BEEP1();//蜂鸣器音1 //BUZZER_BEEP1();//蜂鸣器音1 //delay_ms(50); SYS_Init();//系统初始化总函数 while(1) //主循环 {
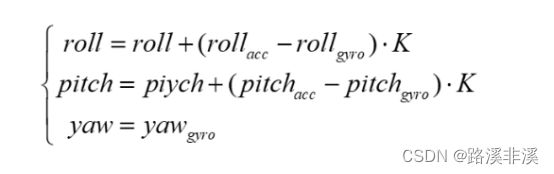
基于一阶互补滤波的MPU6050姿态解算
之前报名了第十八届全国大学生智能车竞赛的单车越野组别,但由于种种原因最终未能完赛。所以打算把自己做好的一部分发出来,希望对往后的刚参加竞赛的同学们有所帮助,同时也是对自己过去一个多学期生活的一点总结。由于学疏才浅,如有不准确或者错误的地方,还请不吝赐教。 代码基于逐飞科技的CH32V307开源库。 为什么需要一阶互补滤波 当我们通过MPU6050进行姿态解算时,MPU6050给了我们