本文主要是介绍姿态解算知识点1——四元数互补滤波求解欧拉角,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1.目标
-
求四元数q0、q1、q2、q3;
-
求解飞行器、机器人的欧拉角pitch、roll、yaw;
2.算法总框图

3.四元数数学模型及公式推导

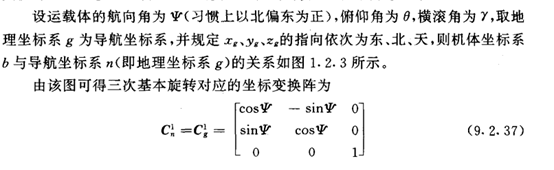
上面的b系就是机体坐标系,R系可以认为是导航坐标系(即地理坐标系n)。

4. 四元数更新代码实现
/******************************************************************************* Function Name : update_quaternion
* Description : 更新四元数,使用互补滤波
* Input : ax/ay/az: IMU加速度原始采样值, gx/gy/gz:IMU陀螺仪原始采样值
* Output : None
* Return : None******************************************************************************/
float q0 = 1.0f, q1 = 0.0f, q2 = 0.0f, q3 = 0.0f;//四元数
static float exInt = 0, eyInt = 0, ezInt = 0;
static void update_quaternion(float ax, float ay, float az, float gx, float gy, float gz)
{float norm;float vx, vy, vz;float ex, ey, ez;float q0q0 = q0*q0;float q0q1 = q0*q1;float q0q2 = q0*q2;float q1q1 = q1*q1;float q1q3 = q1*q3;float q2q2 = q2*q2;float q2q3 = q2*q3;float q3q3 = q3*q3;if(ax*ay*az==0)return;// 第一步:对加速度数据进行归一化norm = sqrt(ax*ax + ay*ay + az*az);ax = ax / norm;ay = ay / norm;az = az / norm;// 第二步:DCM矩阵旋转vx = 2*(q1q3 - q0q2);vy = 2*(q0q1 + q2q3);vz = q0q0 - q1q1 - q2q2 + q3q3 ;// 第三步:在机体坐标系下做向量叉积得到补偿数据ex = ay*vz - az*vy ;ey = az*vx - ax*vz ;ez = ax*vy - ay*vx ;// 第四步:对误差进行PI计算,补偿角速度exInt = exInt + ex * Ki;eyInt = eyInt + ey * Ki;ezInt = ezInt + ez * Ki;gx = gx + Kp*ex + exInt;gy = gy + Kp*ey + eyInt;gz = gz + Kp*ez + ezInt;// 第五步:按照四元数微分公式进行四元数更新q0 = q0 + (-q1*gx - q2*gy - q3*gz)*halfT;q1 = q1 + (q0*gx + q2*gz - q3*gy)*halfT;q2 = q2 + (q0*gy - q1*gz + q3*gx)*halfT;q3 = q3 + (q0*gz + q1*gy - q2*gx)*halfT;//规范化Pitch、Roll轴四元数norm = sqrt(q0*q0 + q1*q1 + q2*q2 + q3*q3);q0 = q0/norm;q1 = q1/norm;q2 = q2/norm;q3 = q3/norm;
}
5.四元数转欧拉角
我们一般这样定义,pitch为俯仰角,roll为航向角,yaw为翻滚角。
地理坐标系定义遵循右手螺旋定则,描述如下:

显然地理坐标系一般有两种定义方式。
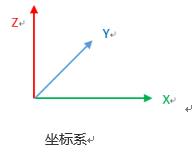
方式一:可以选择x轴朝右,y轴朝前,z轴垂直向上 俗称:东北天 --- 右前上,如下图:
| 轴 | 地理坐标系 | 载体坐标系 | 欧拉角 | 范围 | 方向 |
| X | E | 右 | θ- Pitch | -90° ~ +90° | 绕X轴旋转 |
| Y | N | 前 | γ- Roll | -180° ~ +180° | 绕Y轴旋转 |
| Z | U | 上 | ψ- Yaw | -180° ~ +180° | 绕Z轴旋转 |
方式二:也可以选择x轴朝右,y轴朝前,z轴垂直向上 俗称:北东地 --- 前右下,如下图:

| 轴 | 地理坐标系 | 载体坐标系 | 欧拉角 | 范围 | 方向 |
| X | N | 前 | θ- Roll | -180° ~ +180° | 绕X轴旋转 |
| Y | E | 右 | γ- Pitch | -90° ~ +90° | 绕Y轴旋转 |
| Z | D | 下 | ψ- Yaw | -180° ~ +180° | 绕Z轴旋转 |
本文算法选择的是x轴朝右,y轴朝前,z轴垂直向上,东北天 --- 右前上。
6.数据曲线
- 机体在沿水平面运动时俯仰角曲线效果图

红色曲线-静态角度,有明显的正态分布白噪声;
绿色曲线-融合后的角度,基本不受噪声影响,比较稳定
- 机体朝前向上抬起时俯仰角曲线效果图

红色曲线-静态角度,有明显的波动噪声;
绿色曲线-融合后的角度,基本不受噪声影响,而且跟随特性良好
7.源代码
FIR滤波源代码-C语言
欧拉角微分方程算法代码
8.参考文献
- 惯性导航——秦永元
- 惯性导航基本原理——刘保中
这篇关于姿态解算知识点1——四元数互补滤波求解欧拉角的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!