滑模专题

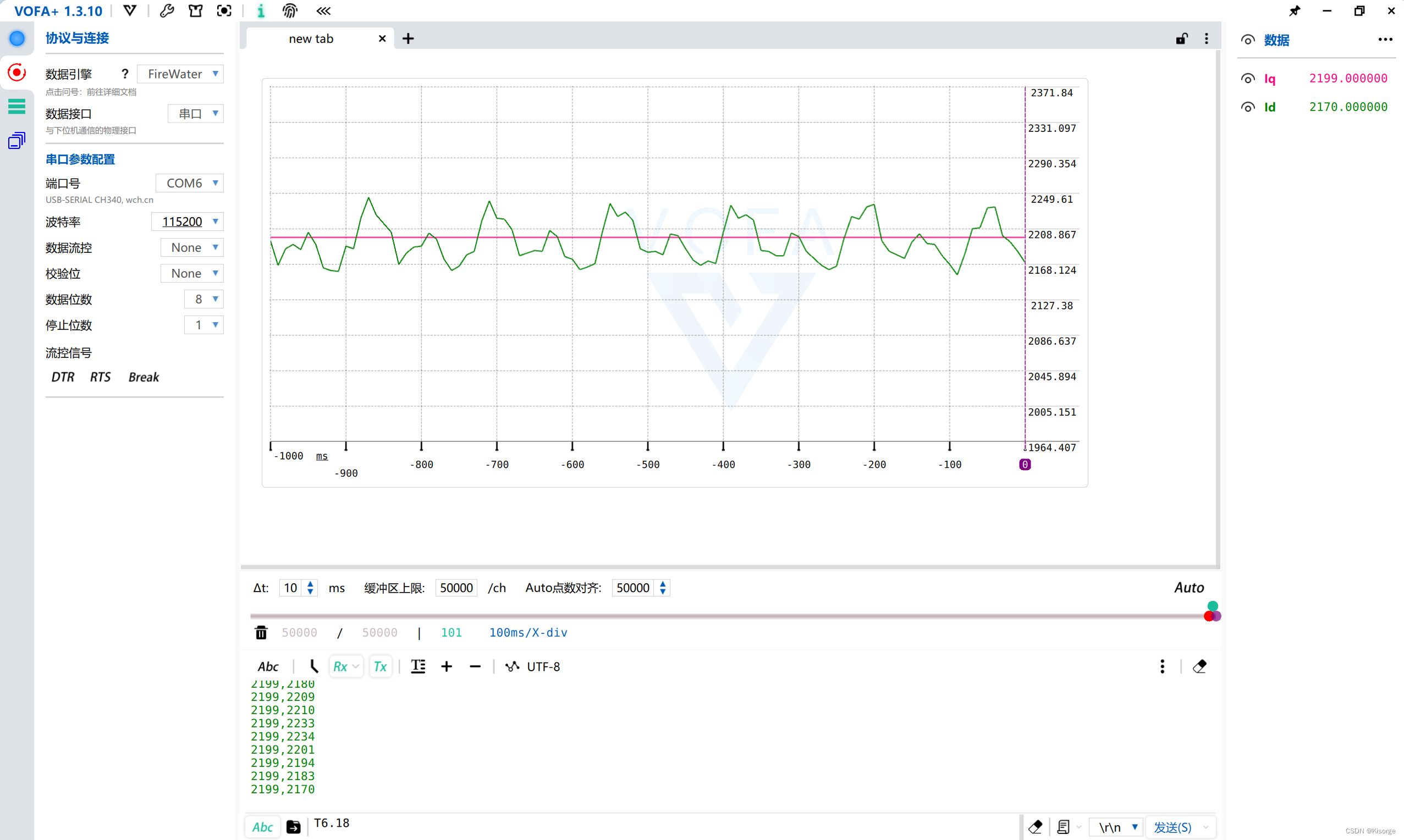
基于simulink的PEM燃料电池控制系统建模与仿真,对比PID,积分分离以及滑模控制器
目录 1.课题概述 2.系统仿真结果 3.核心程序与模型 4.系统原理简介 4.1 PID控制器 4.2 积分分离PID控制器 4.3 滑模控制器 5.完整工程文件 1.课题概述 基于simulink的PEM燃料电池控制系统建模与仿真,对比PID,积分分离以及滑模控制器。 2.系统仿真结果 (完整程序运行后无水印)
【电机控制】滑模观测器PMSM无感控制波形图
【电机控制】滑模观测器PMSM无感控制波形图 文章目录 前言一、FOC控制1.三相电流2.Clark变换静止坐标系iαiβ3.park变换旋转坐标系idiq4.电流环PI控制输出UdUq5.UdUq 反park变换UαUβ 二、反电动势观测器BEMF1.静止坐标系iαiβ提取反电动势EaEb2.反电动势EaEb提取位置信息、EqEd3.位置信息提取机械转速wr 总结
用于不确定机器人机械手的无颤振快速固定时间滑模控制
《Manipulators Chattering-free Fast Fixed-time Sliding Mode Control for Uncertain Robotic》 Huayang Sai , Zhenbang Xu, Enyang Zhang, Chunyang Han, and Yang Yu

滑模控制器是用来干什么的,生活中的应用案例有哪些,滑模控制器中的滑模是什么意思,来源是什么?
问题描述:滑模控制器是用来干什么的,生活中的应用案例有哪些,滑模控制器中的滑模是什么意思,来源是什么? 问题解答: 滑模控制器(Sliding Mode Controller)是一种用于控制系统的控制器设计方法,旨在实现对系统的鲁棒稳定控制。滑模控制器的主要目标是通过引入一个滑模面使系统状态在该面上快速、稳定地滑动,从而实现对系统的控制。滑模控制器通常具有很强的鲁棒性,对于系统参数变化、外部扰
AUV直线路径跟踪仿真-反步滑模方法
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 文章目录 前言 一、整体思路 二、控制器设计 1.纵向推力-反步法 2.转艏力矩-滑模方法 三、虚拟AUV速度推算 四、仿真实现 1.艏向制导误差和滑模面函数 2.控制器和模型解算 3.解耦速度得到艏向角和漂角 4.积分速度得到位置信息 5.得到位置误差和趋近角信息 6

AUV路径跟踪滑模控制
一、参考文献 Modelling and Motion Control of an Underactuated Autonomous Underwater Vehicle Principles of Guidance-Based Path Following in 2D and 3D 二、仿真效果 三、源代码 (1)AUV模型 %p

【电机控制】PMSM无感foc控制(七)滑模观测器的应用
0. 前言 前面我们讲解了foc的整个流程框图,如图0-1所示,其中的坐标变换、PID控制以及SVPWM都已讲解完毕,接下来会用通俗易懂的方式(不会涉及到特别复杂难以理解的公式)来讲解滑模观测器是如何得到的反电动势,从而提取出转子位置及转速。 图0-1 FOC双环控制系统框图 1. 滑模观测器 建议大家先看一下滑模观测器的大致概念,不用完全理解,但是
基于LMI的非线性混沌系统滑模控制
目录 前言 1.非线性系统 2.控制器设计 3.仿真分析 3.1仿真混沌系统 3.2 LMI求解反馈阵F 3.3仿真模型 3.4仿真结果 3.5注意事项 前言 前面我们介绍了很多种滑模面设计,以及介绍了几篇结合LMI的滑模控制,其核心思想可以看作是用LMI去控制非线性的状态反馈部分,滑模去做线性的鲁棒部分,本篇博客介绍一篇非线性系统的滑模控制。 1.非
基于LMI的非线性混沌系统滑模控制
目录 前言 1.非线性系统 2.控制器设计 3.仿真分析 3.1仿真混沌系统 3.2 LMI求解反馈阵F 3.3仿真模型 3.4仿真结果 3.5注意事项 前言 前面我们介绍了很多种滑模面设计,以及介绍了几篇结合LMI的滑模控制,其核心思想可以看作是用LMI去控制非线性的状态反馈部分,滑模去做线性的鲁棒部分,本篇博客介绍一篇非线性系统的滑模控制。 1.非

基于LMI的等效滑模控制
目录 前言 1.一阶欠驱动倒立摆系统 2.基于LMI的等效滑模控制器 3.simulink仿真 3.1 simulink模型 3.2 结果分析 3.2 结论 前言 关于LMI和滑模控制的结合上两篇文章已有介绍和仿真分析,本篇文章再介绍一篇特别常见常用的基于LMI的等效滑模控制,并且结合一阶倒立摆模型进行仿真分析,并且考虑了模型的不确定性,继续看下去吧。 往期文章
基于LMI的等效滑模控制
目录 前言 1.一阶欠驱动倒立摆系统 2.基于LMI的等效滑模控制器 3.simulink仿真 3.1 simulink模型 3.2 结果分析 3.2 结论 前言 关于LMI和滑模控制的结合上两篇文章已有介绍和仿真分析,本篇文章再介绍一篇特别常见常用的基于LMI的等效滑模控制,并且结合一阶倒立摆模型进行仿真分析,并且考虑了模型的不确定性,继续看下去吧。 往期文章
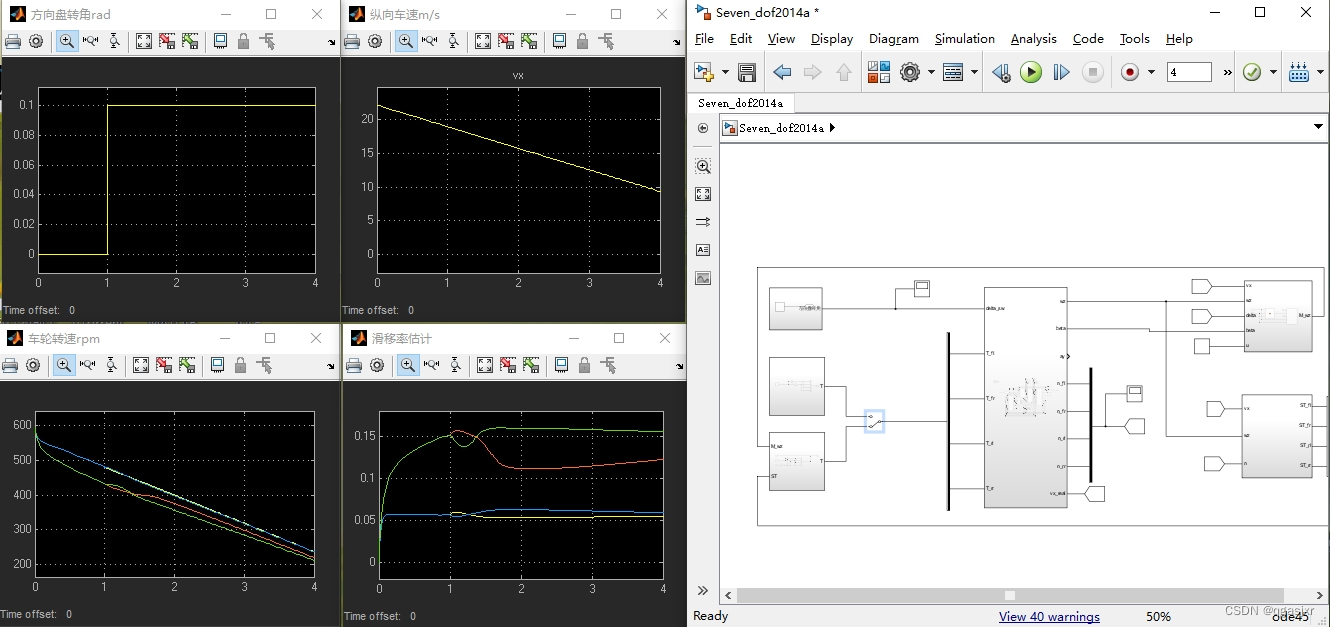
7自由度整车模型 滑模控制+平均分配 滑移率观测+PID防抱死控制
随着电动汽车的普及和使用范围的扩大,电动汽车的转向制动稳定性控制变得十分重要。为了实现电动汽车的高效稳定性控制,本文提供了一种基于MATLAB Simulink的电动汽车转弯制动ABS模型,并通过联合直接横摆力矩DYC转向制动稳定性控制的方式实现了多种工况下的车辆转向制动稳定性控制。 本模型包含整车模块、DYC和ABS模块三个主要模块。其中,整车模块基于7自由度整车模型,能够准确地模拟电动汽车的
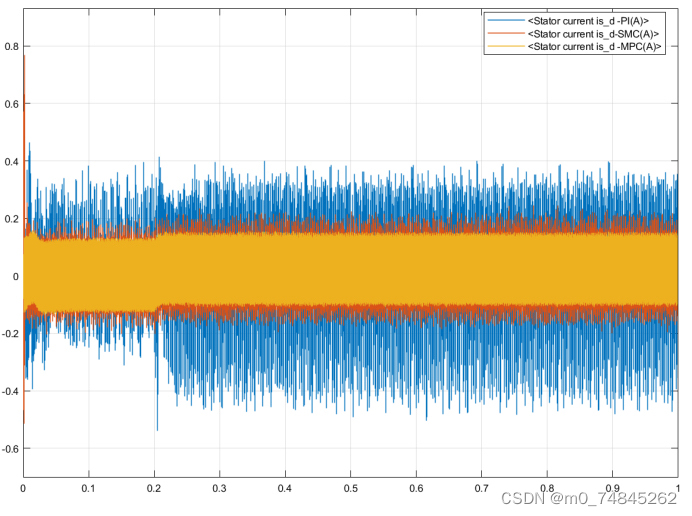
永磁同步电机基于模型预测控制(MPC)电流环和 基于二阶滑模控制(ST SMC)电流环以及 基于PI控制电流环三合一模型
永磁同步电机基于模型预测控制(MPC)电流环和 基于二阶滑模控制(ST SMC)电流环以及 基于PI控制电流环三合一模型 的永磁同步电机双闭环仿真模型全新 下图分别为D轴电流与电磁转矩对比 送参考资料 ID:63130669374757691盲生与华点

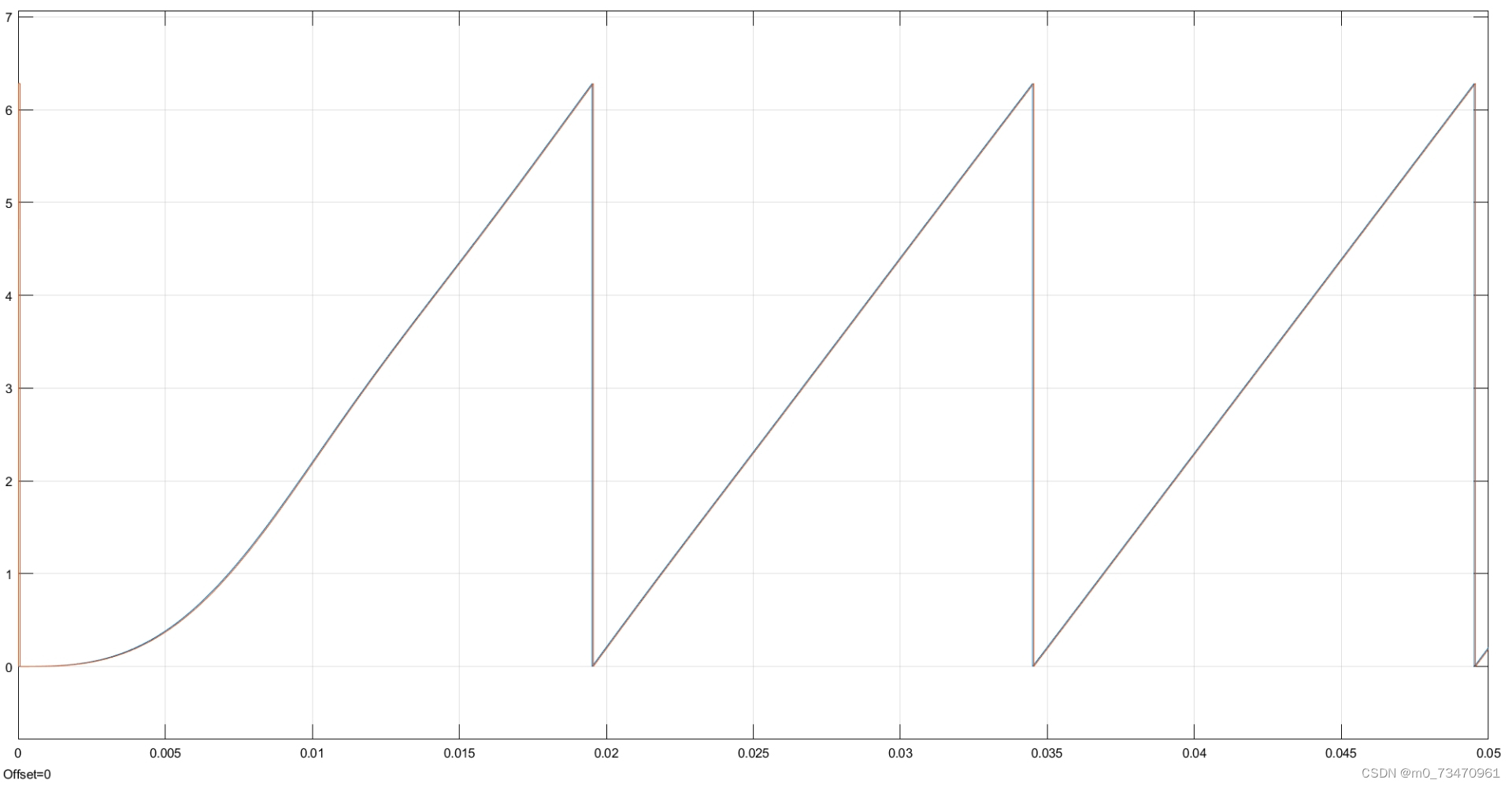
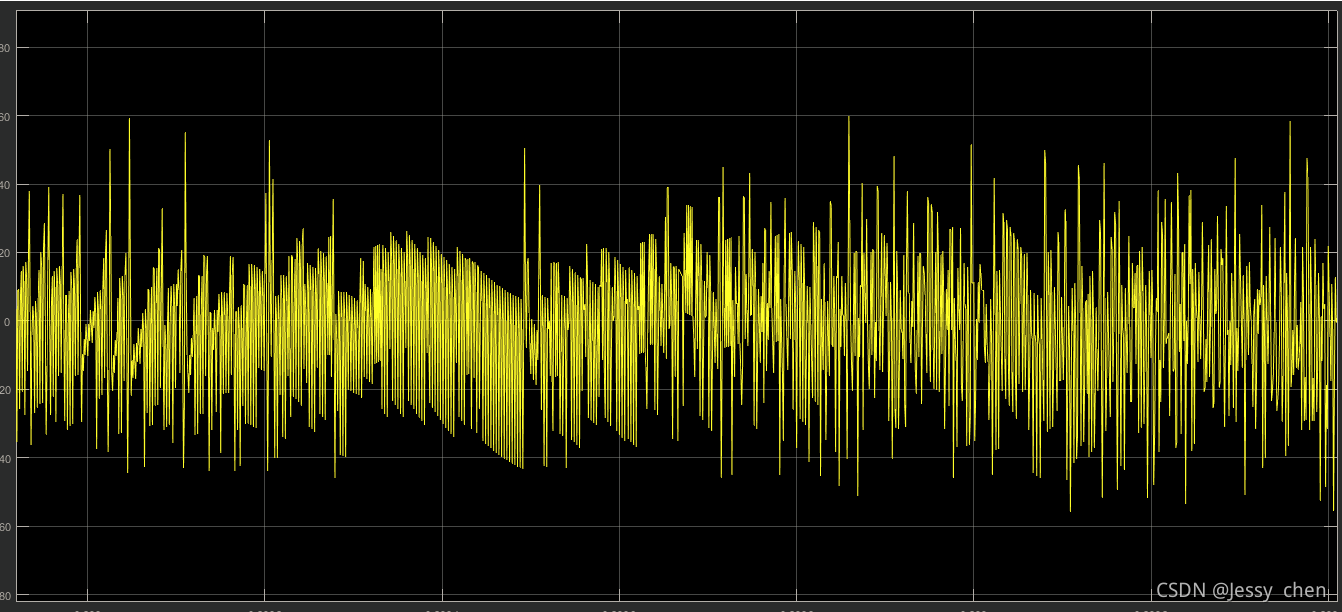
PMSM无传感器控制 滑模SMO控制 转子位置估计利用滤波后的扩展反电动势进行反正切计算
PMSM无传感器控制 滑模SMO控制 转子位置估计利用滤波后的扩展反电动势进行反正切计算,再加上滤波器延迟角度进行补偿。 运行无问题,不,只包括仿真文件。 ID:4520658282790059
![[学习分享]滑模控制、终端滑模控制、非奇异快速,趋近律、饱和函数、Matlab仿真、干扰、非线性控制[半天入门]](https://img-blog.csdnimg.cn/7de0fb3b5f42491cba2c4b71f0446749.png)
[学习分享]滑模控制、终端滑模控制、非奇异快速,趋近律、饱和函数、Matlab仿真、干扰、非线性控制[半天入门]
鉴于本人学习经历,滑模控制临时使用,尤其是改进型终端滑模控制,过程中复现了两篇论文入门,均基于Matlab/Simulink仿真,考虑时间关系,未严谨编辑,现进行简单分享,建议对照原文献阅读,版本MATLAB R2021b,文献及仿真资源已上传。 本文要点:滑模控制、终端滑模控制、Matlab仿真、趋近律、饱和函数 参考文献: [1]赵海滨,陆志国,刘冲,于清文,颜世玉.非奇异终端滑模控制仿
永磁同步电机滑模观测器无位置传感器矢量控制算法仿真模型,基于SMO的PMSM无位置传感器矢量控制算法
永磁同步电机滑模观测器无位置传感器矢量控制算法仿真模型,基于SMO的PMSM无位置传感器矢量控制算法。 其中SMO模块由锁相环组成,不同于反正切函数。 由matlab/simulink搭建,以供参考学习。 ID:72100679743330301阳光彩虹小彪马
基于滑模观测器的永磁同步电机无位置传感器控制
1、传统滑膜观测器设计 目前,大多数传统SMO算法的设计是基于静止坐标系下的数学模型的,重写电机的电压方程为: 其中:Ld|、Lq为定子电感;we为电角速度;p=d/dt,为微分算子;Uα、Uβ为定子电压,iα,iβ为定子电流,Eα,Eβ为扩展反电动势(EMF),且满足: 对于表贴式三相PMSM(Ld=Lq=L,) ,打展反电动势的表达式(2)将被间化,为仅与电机的转速有关的变量。当转速较快时
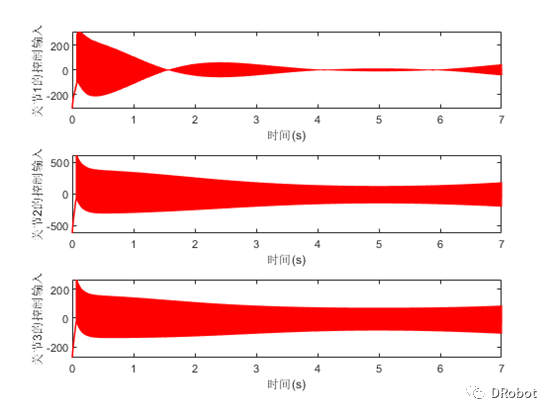
基于指数趋近律的机器人滑模轨迹跟踪控制算法及MATLAB仿真
机械手是工业制造领域中应用最广泛的自动化机械设备,广泛应用于工业制造、医疗、军工、半导体制造、太空探索等领域。它们虽然形式不同,但都有一个共同的特点,即能够接受指令,并能准确定位到三维(或二维)空间的某一点进行工作。由于其在3D打印、喷漆机器人、汽车制造等领域的广泛应用,机器人的控制显得尤为重要。而滑模变结构控制SMC由于其快速的瞬态响应和对不确定性和扰动的鲁棒性,在机器人控制领域受到了广泛