本文主要是介绍基于simulink的PEM燃料电池控制系统建模与仿真,对比PID,积分分离以及滑模控制器,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
1.课题概述
2.系统仿真结果
3.核心程序与模型
4.系统原理简介
4.1 PID控制器
4.2 积分分离PID控制器
4.3 滑模控制器
5.完整工程文件
1.课题概述
基于simulink的PEM燃料电池控制系统建模与仿真,对比PID,积分分离以及滑模控制器。
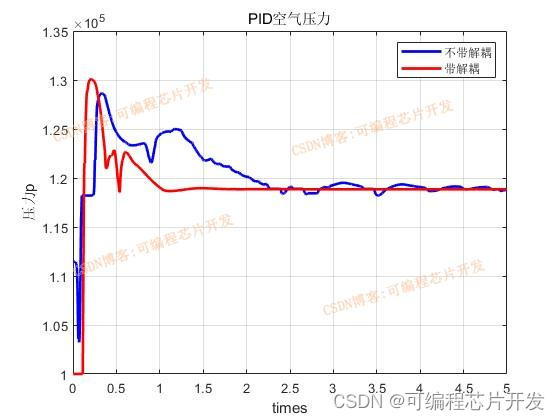
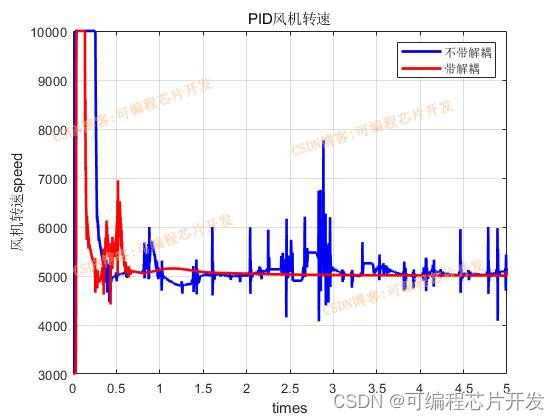
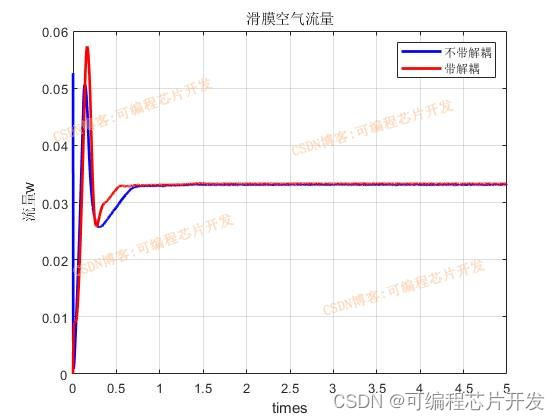
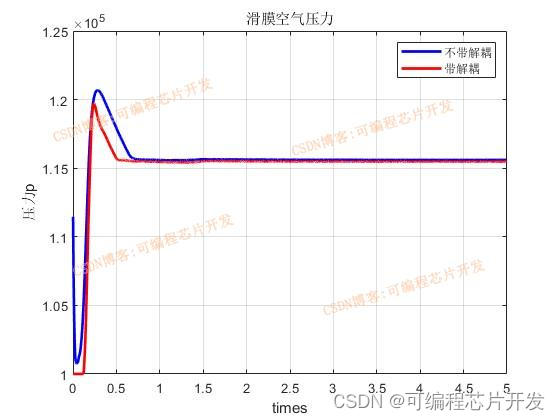
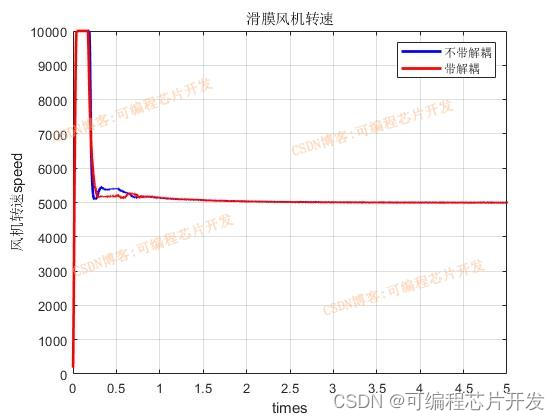
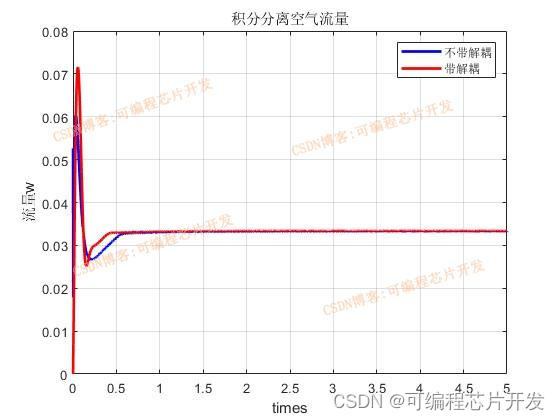
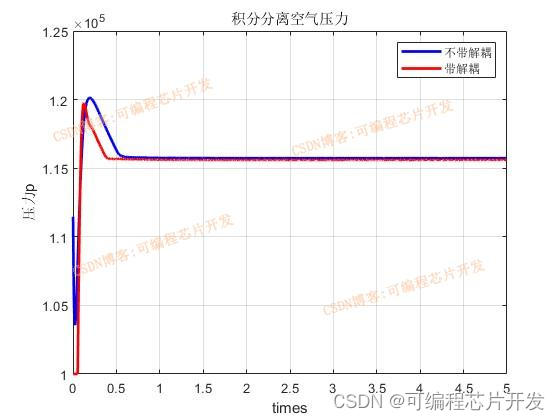
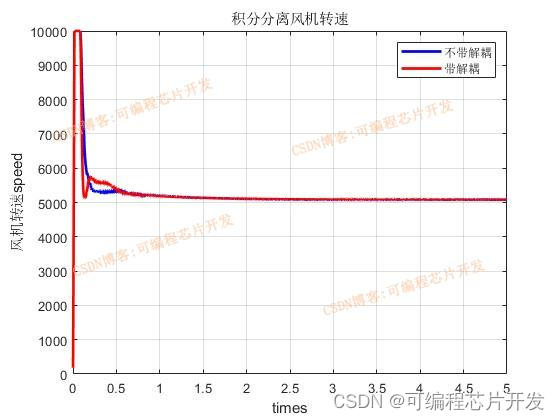
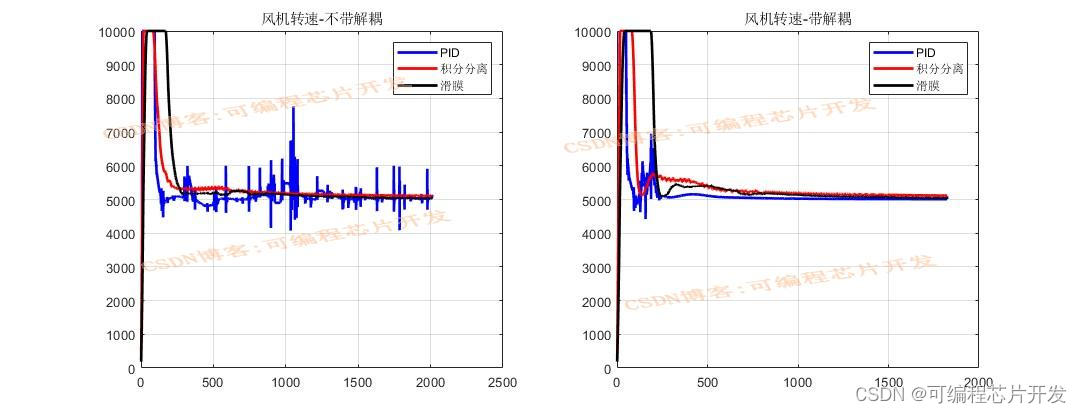
2.系统仿真结果
(完整程序运行后无水印)



3.核心程序与模型
版本:MATLAB2022a
08_023-3m
4.系统原理简介
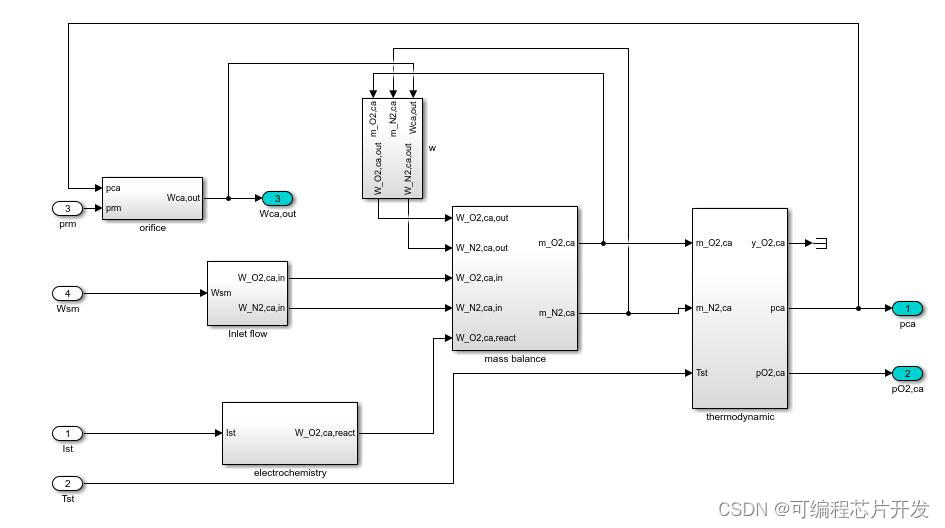
PEM(质子交换膜)燃料电池作为一种高效的能量转换装置,在众多领域中展现出广泛的应用潜力。为了实现PEM燃料电池的最佳性能和稳定性,先进的控制系统设计至关重要。在燃料电池控制系统的设计中,PID(比例-积分-微分)控制、积分分离控制以及滑模控制是三种常用的控制策略。
4.1 PID控制器
PID控制器是最为经典且广泛应用的控制器之一,通过结合比例(P)、积分(I)、微分(D)三个基本控制作用,可以有效处理系统中的静态误差、动态响应及稳态精度问题。PID控制器的输出u(t)由以下公式给出:

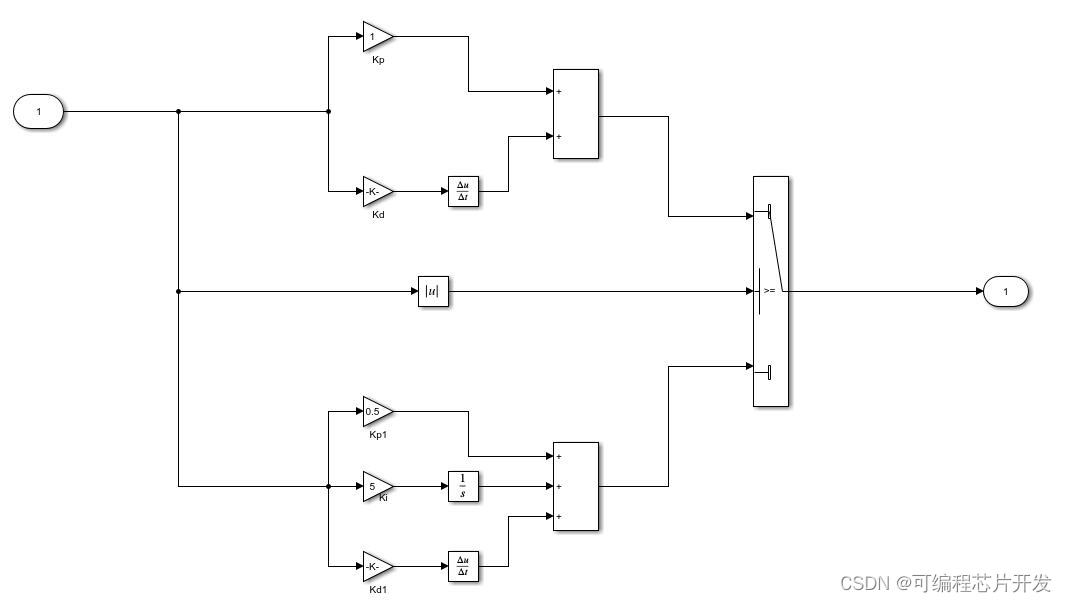
4.2 积分分离PID控制器
积分分离PID控制器是在传统PID基础上的一种改进,主要针对存在大偏差初始阶段的情况。在系统出现大偏差时,暂时关闭积分作用,以避免积分饱和问题,加快系统响应速度。一旦误差减小到某一阈值ϵ内,再开启积分项。其控制律可表示为:

4.3 滑模控制器
滑模控制是一种非线性控制方法,通过设计一个滑动面,并使系统状态沿该滑动面向目标状态快速收敛,从而达到控制目的。滑模控制器的基本思想是引入一个滑动面函数s(t),通常定义为系统状态与期望状态之差:

其中,η是滑模增益,决定了滑模运动的速度;λ是边界层参数,用于避免抖振现象。通过适当选择η和λ,可以保证系统状态快速稳定在滑动面上,进而实现对系统的有效控制。
在PEM燃料电池控制系统设计中,选择合适的控制策略需综合考虑系统的动态特性、控制目标及实际操作条件。PID控制器因其通用性强、易于实现而被广泛采用,但对于燃料电池的非线性特性和大范围变工况适应性,滑模控制由于其快速响应和强鲁棒性而显示出优势。积分分离PID则在处理初始大偏差或避免积分饱和方面有独特效果。
实际应用中,还需对控制器参数进行细致调整,并可能结合模型预测控制、自适应控制等先进控制策略,以进一步提升系统性能和效率。此外,考虑到PEM燃料电池的复杂热力学和电化学过程,控制策略的设计还需紧密结合系统模型,通过精确建模和辨识,实现更精准的控制效果。
5.完整工程文件
v
这篇关于基于simulink的PEM燃料电池控制系统建模与仿真,对比PID,积分分离以及滑模控制器的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




