本文主要是介绍基于LMI的非线性混沌系统滑模控制,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
前言
1.非线性系统
2.控制器设计
3.仿真分析
3.1仿真混沌系统
3.2 LMI求解反馈阵F
3.3仿真模型
3.4仿真结果
3.5注意事项
前言
前面我们介绍了很多种滑模面设计,以及介绍了几篇结合LMI的滑模控制,其核心思想可以看作是用LMI去控制非线性的状态反馈部分,滑模去做线性的鲁棒部分,本篇博客介绍一篇非线性系统的滑模控制。
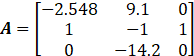
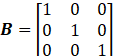
1.非线性系统
其控制目标为使状态变量x趋近于目标量xr,其中非线性函数f满足Lipschitz条件,即:![]() ,L为Lipschitz条件的矩阵。
,L为Lipschitz条件的矩阵。
2.控制器设计
定义误差变量z=x-xr,则误差变量导数z'=x'-xr',这里可以将误差z看作为动态的滑模面,所以将z设计为滑模函数,设计如下形式的控制律:
其中:
①F为求解LMI得到的状态反馈增益,F=inv(PB)M;

②ur=-Fxr-inv(B)(Axr+f(xr)-xr')为前馈控制项;
③us=-inv(B)(εsign(z))为滑模鲁棒项。
所以控制律变为:

3.仿真分析
3.1仿真混沌系统
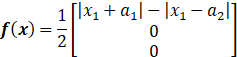
Lipschitz矩阵L的选取:
当状态变量x∈[a,b],f(x)为定义在该区间的连续光滑函数,根据中值定理有:f(a)-f(b)<f'(x)(a-b),所以上述非线性函数f有如下不等式成立:
![]()
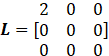
显然f'(x)是一个3x3的雅可比矩阵,且最大的元素即对x1的偏导为1,可以令L≥max(f'(x)),所以定义矩阵L为:
3.2 LMI求解反馈阵F
这里使用YALMIP工具箱求解,也可以使用maltab自带的LMI工具箱求解,具体求解就不再叙述了,往期文章有很多。
求解结果为:F =
-1.5127 -5.0500 0.0001
-5.0497 -2.6069 6.5995
0.0001 6.6000 -3.6072
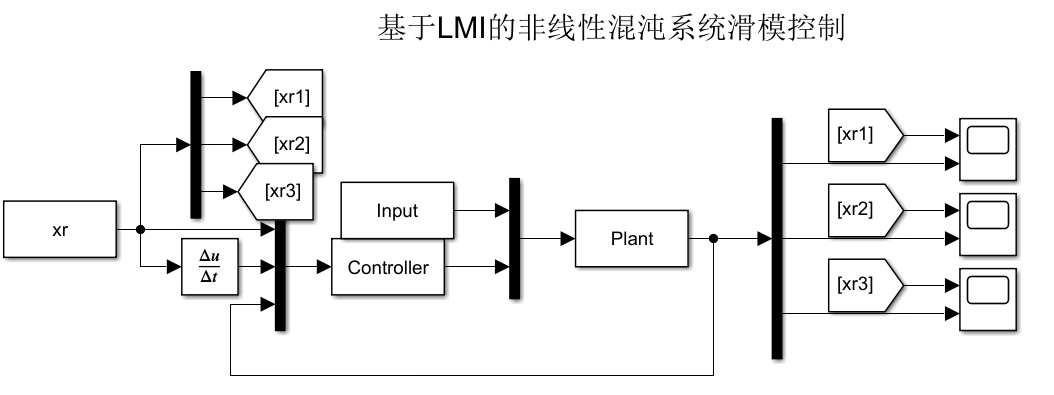
3.3仿真模型
这里选择初始的状态为[1 -1 -1]
3.4仿真结果
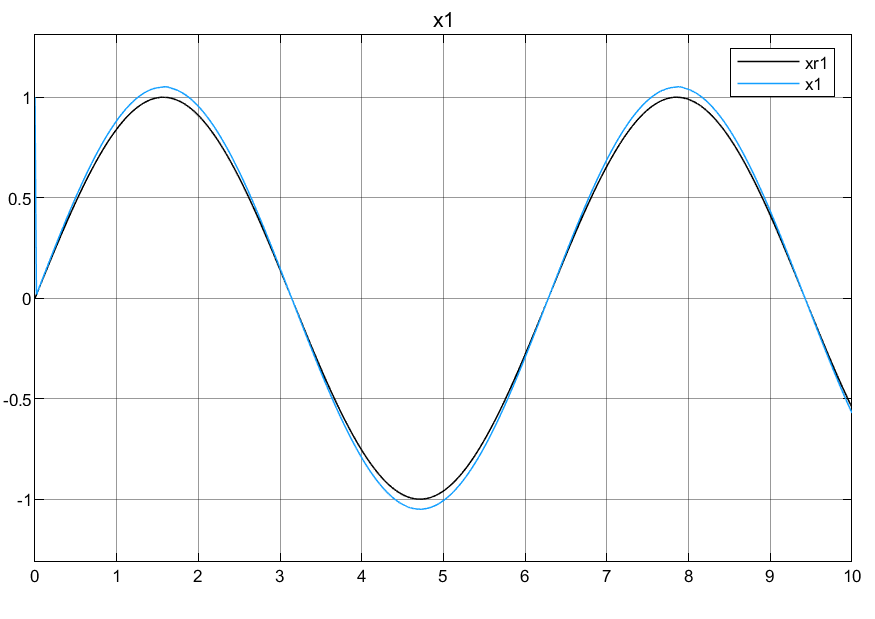
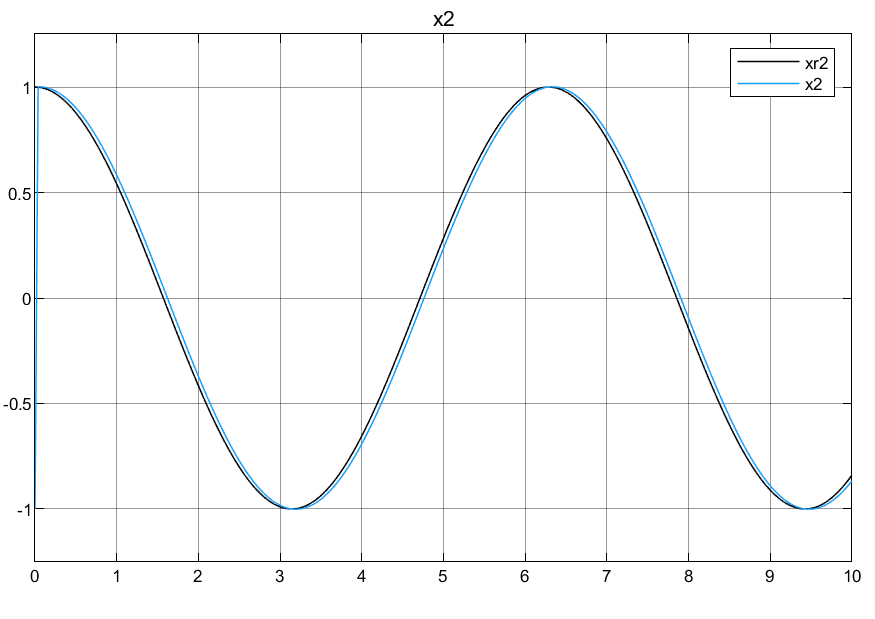
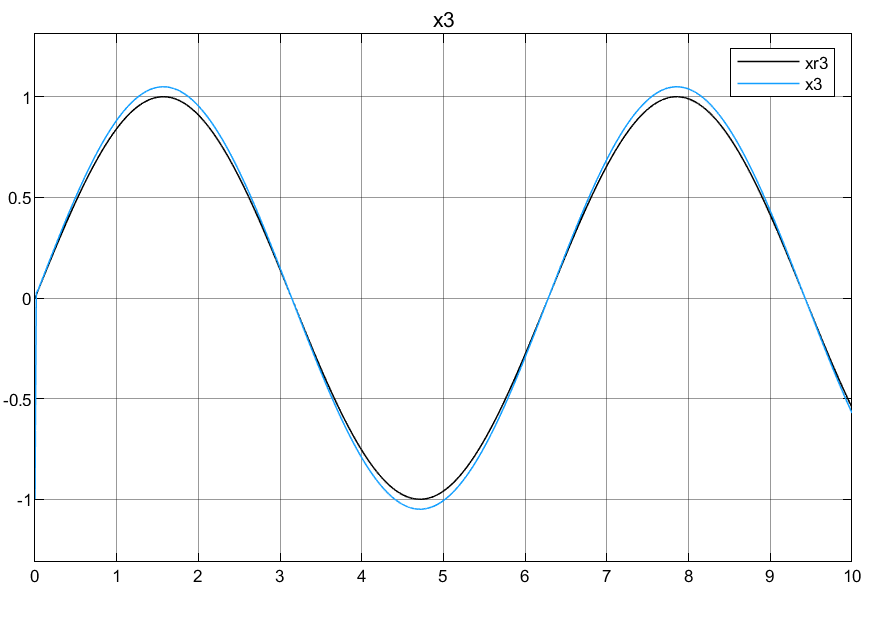
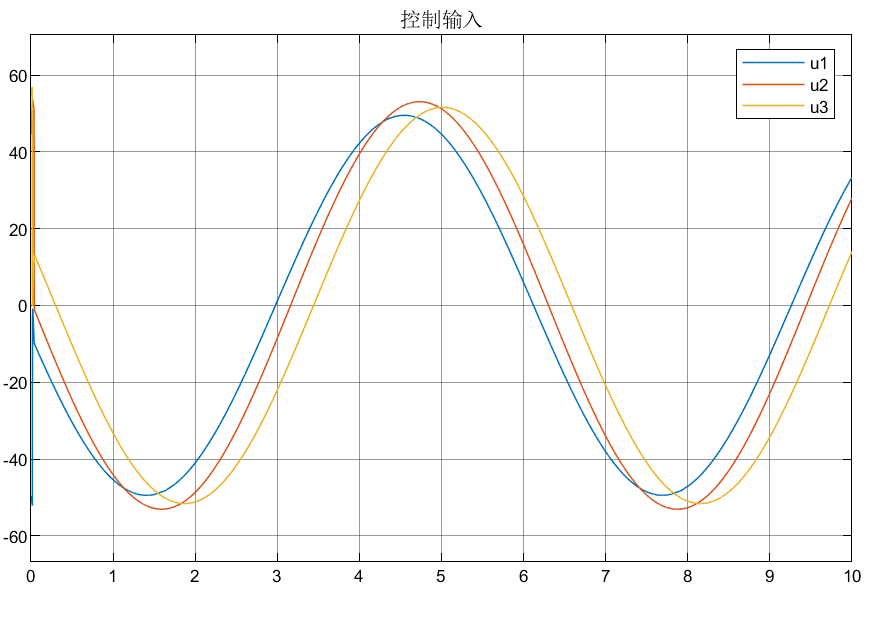
总结:可以看到对于跟踪的效果在峰值的时候误差还是比较大的,效果不是特别理想,具体的原因等待后面的探索
3.5注意事项
①对于求解器的选择和步长的选择对仿真结果的影响还是比较大的,刚开始选择任意求解和任意步长的时候求解的效果较差,此外选择定步长为0.01时效果也很差,后面将步长调整到0.001才有了上面较好的效果。但是对于初始步长到跟踪目标所需的时间极短!
②对于L的选择冒失在这里影响不是很大,因为我试图将L增大重新求解F矩阵,但是仿真结果几乎相差不大,可能是LMI反馈项影响权重不是很大的原因。
如果有帮助,麻烦帮忙点个赞是我最大的分享动力,非常感谢!
注:仅为便利自己学习,错误在所难免,如有侵权,请联系删除,有兴趣的学者可以参考学习交流,谢谢!
这篇关于基于LMI的非线性混沌系统滑模控制的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





