本文主要是介绍基于LMI的等效滑模控制,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
前言
1.一阶欠驱动倒立摆系统
2.基于LMI的等效滑模控制器
3.simulink仿真
3.1 simulink模型
3.2 结果分析
3.2 结论
前言
关于LMI和滑模控制的结合上两篇文章已有介绍和仿真分析,本篇文章再介绍一篇特别常见常用的基于LMI的等效滑模控制,并且结合一阶倒立摆模型进行仿真分析,并且考虑了模型的不确定性,继续看下去吧。
往期文章:
基于LMI的线性化系统控制(白嫖程序模型)_Mr. 邹的博客-CSDN博客
基于LMI的线性系统滑模鲁棒控制_Mr. 邹的博客-CSDN博客
使用hinfric和hinflmi函数设计H∞输出反馈控制器(含白嫖代码)_Mr. 邹的博客-CSDN博客
VSC/SMC(一)——基于趋近律的滑模控制(白嫖程序模型)_Mr. 邹的博客-CSDN博客_滑模面的选取
VSC/SMC(二)——基于趋近律的滑模鲁棒控制(白嫖程序模型)_Mr. 邹的博客-CSDN博客
VSC/SMC(三)——基于饱和切换函数的滑模控制(白嫖程序模型)_Mr. 邹的博客-CSDN博客
VSC/SMC(四)——基于线性化反馈的滑模控制(白嫖程序模型)_Mr. 邹的博客-CSDN博客
VSC/SMC(五)——基于参考模型的滑模控制_Mr. 邹的博客-CSDN博客
基于参考模型的主动悬架滑模控制(详细滑模控制推导)_Mr. 邹的博客-CSDN博客
VSC/SMC(六)——基于低通滤波器的滑模控制(白嫖程序模型)_Mr. 邹的博客-CSDN博客
VSC/SMC(七)——基于高增益观测器的滑模控制(白嫖程序模型)_Mr. 邹的博客-CSDN博客
VSC/SMC(八)——基于慢时变干扰观测器的滑模控制(白嫖程序模型)_Mr. 邹的博客-CSDN博客_慢时变干扰观测器 SMC/VSC(九)——控制器容错自适应滑模控制(白嫖程序模型)_Mr. 邹的博客-CSDN博客
VSC/SMC(十)——主辅电机的协调滑模控制(白嫖程序模型)_Mr. 邹的博客-CSDN博客
SMC/VSC(十一)——基于趋近律的离散滑模控制(白嫖程序模型)_Mr. 邹的博客-CSDN博客
想学好滑模控制器和LMI控制的的同学,欢迎白嫖我的程序和模型!
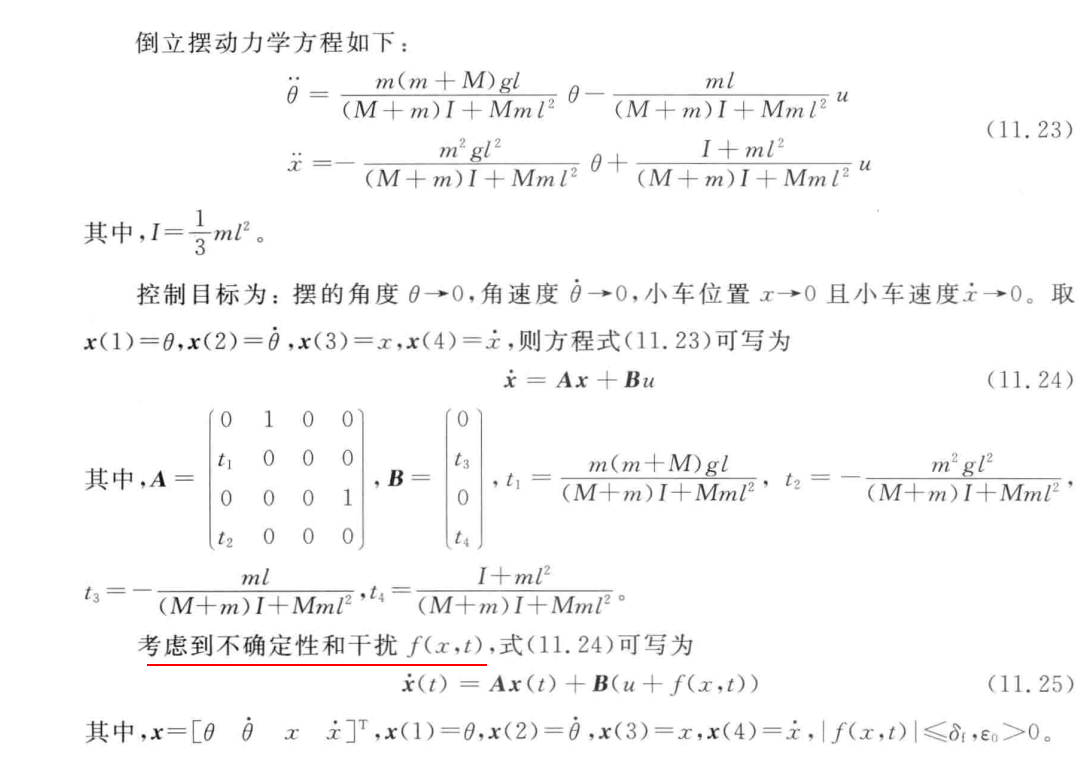
1.一阶欠驱动倒立摆系统
什么叫欠驱动系统?
欠驱动系统是指系统的独立控制变量个数小于系统自由度个数的一类非线性系统,在节约能量、降低造价、减轻重量、增强系统灵活度等方面都较完全驱动系统优越,简单的说就是输入比要控制的量少的系统。
2.基于LMI的等效滑模控制器
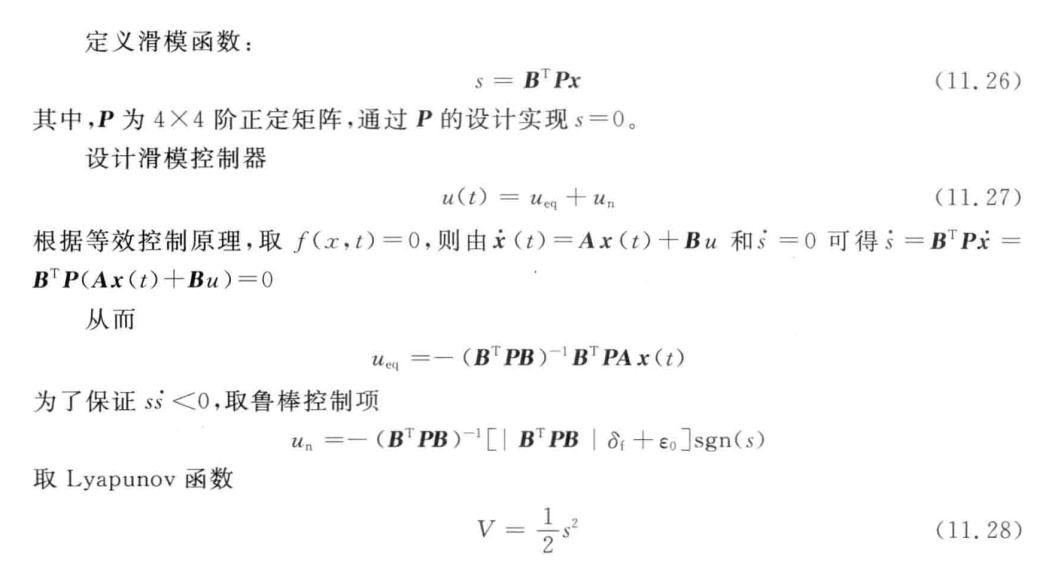
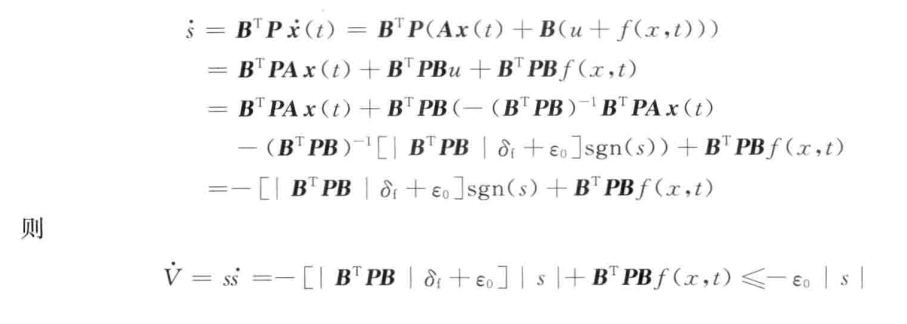
在等效滑模控制的基础上引入等效项:


3.simulink仿真
3.1 simulink模型
未完待续........
3.2 结果分析
3.2 结论
如果有帮助,麻烦帮忙点个赞是我最大的分享动力,非常感谢!
注:仅为便利自己学习,错误在所难免,如有侵权,请联系删除,有兴趣的学者可以参考学习交流,谢谢!
这篇关于基于LMI的等效滑模控制的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






