惯性导航专题
长航时陀螺惯性导航系统有哪些?
从1910年至今,陀螺仪的发展经历了四代,第一代是滚珠轴承支承陀螺,第二代是液浮气浮陀螺,第三代是挠性支承(即允许支承位置有一定变形)的转子陀螺,第四代包括静电陀螺、激光陀螺、光纤陀螺和MEMS陀螺等,未来可能有超导陀螺仪。 1、静电陀螺仪(亦称电浮陀螺仪,electrostatic (suspended) gyroscope) 利用超高真空中的强电场产生支承力,取代陀螺马达和万

SGPM02陀螺仪模块通过惯性导航助力AGV小车的发展
之前我们介绍过SGPM01系列陀螺仪模块在智能泳池清洁机器人导航的方案(SGPM01)。这款惯性导航模块收到了许多企业的欢迎。由此,爱普生推出了SGPM02系列陀螺仪模块通过惯性导航,助力AGV小车的发展。 AGV是一种用于运输材料的无人驾驶车辆,并且AGV是复杂的机器。它代表了一个完整的系统、物料处理解决方案,在

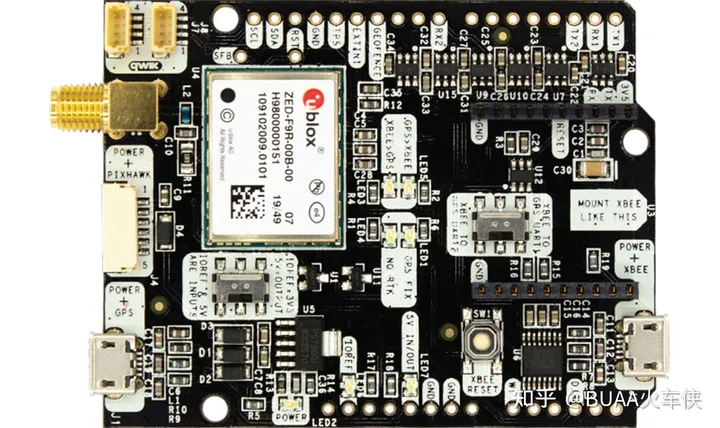
基于u-blox M8L的车载惯性导航系统方案(Carplay Location 认证)
此贴准备记录《基于u-blox M8L的车载惯性导航系统方案(Carplay Location 认证)》,先调查下, 如果有需求我再继续写。
自动驾驶融合定位系列教程五:惯性导航误差分析
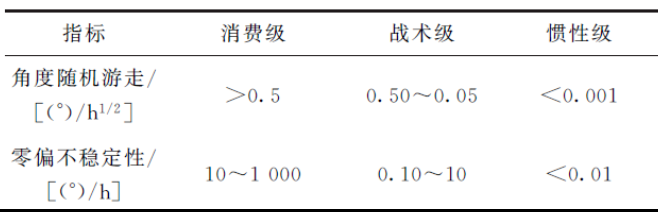
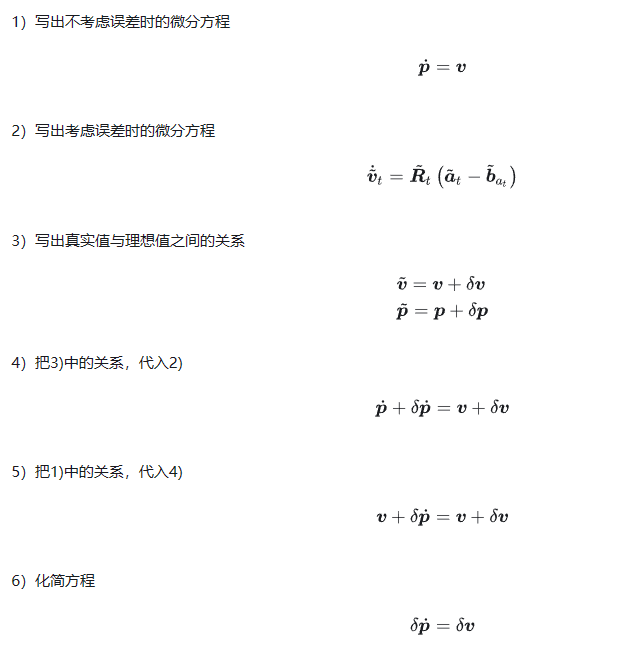
自动驾驶融合定位系列教程五:惯性导航误差分析 一、概述 在定位领域的几乎所有多传感器融合系统中,都有IMU存在,而且,IMU是定位系统的主线与核心(对此可能很多人并不同意,但是我仍然坚定地坚持这一观点)。 对于IMU参与的融合系统(无论是基于滤波还是基于优化),它的误差分析就既是核心内容,也是基础内容,是必须要掌握的。如果要简单解释,所谓融合,就是根据观测误差去反推状态误差,而误差分析就是给
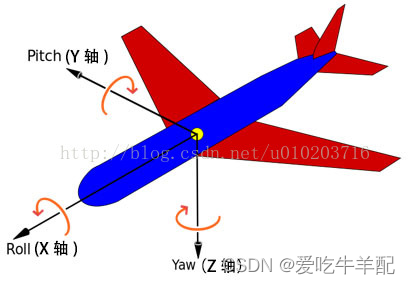
自动驾驶传感器:惯性导航IMU原理
自动驾驶传感器:惯性导航IMU原理 附赠自动驾驶学习资料和量产经验:链接 组合导航里包含了GNSS卫星导航模块与IMU惯性导航模块,前一篇文章写了GNSS模块,本章写IMU惯导,也是本系列最后一篇文章。 1. 惯性测量单元(IMU)概述 惯性测量单元(Inertial measurement unit,IMU),是测量物体三轴姿态角以及加速度的装置。IMU通常包含陀螺仪 (Gyrosc
惯性导航 | 航迹推算与gazebo仿真
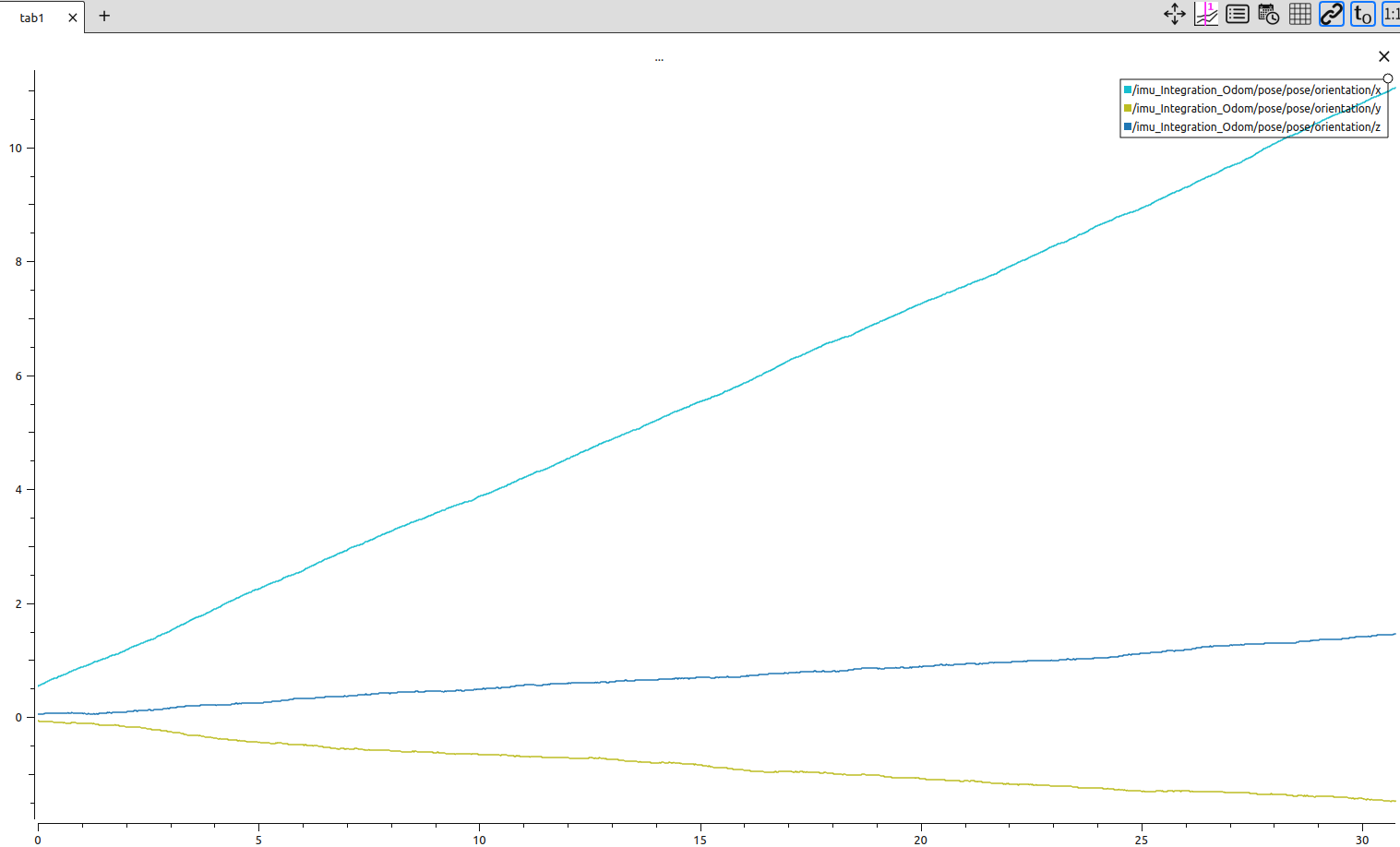
惯性导航 | 航迹推算与gazebo仿真 IMU数据进行短时间航迹推算代码gazebo中进行仿真测试 IMU数据进行短时间航迹推算 代码 声明一个用与 IMU积分的类 ,来实现 短时间内的航迹推算 类的名字叫 IMUIntegration 构造函数 有三个变量进行私有变量初始化 重力、初始陀螺仪零偏、初始加速度零偏。 class IMUIntegration {publi

惯性导航---常用坐标系
惯性导航—常用坐标系 捷联惯导系统的导航解算中,常用到四个坐标系,接下来介绍四个坐标系定义及其表示符号。 1 地心惯性坐标系(i系) 惯性传感器的输出是以该坐标系为参考基准的。 原点X轴Z轴Y轴地球中心赤道平面内,指向春分点沿地球自转轴,指向北极按右手坐标系定义 2 地球坐标系(e系) 地球坐标系相对于惯性坐标系的角速度大小就是地球自转角速率,其值通常取 ω i e \o

【IOS】惯性导航详解(包含角度、加速度、修正方式的api分析)
参考文献 iPhone的惯性导航,基于步态。https://www.docin.com/p-811792664.html Inertial Odometry on Handheld Smartphones: https://arxiv.org/pdf/1703.00154.pdf 惯性导航项目相关代码:https://github.com/topics/inertial-navigation-s

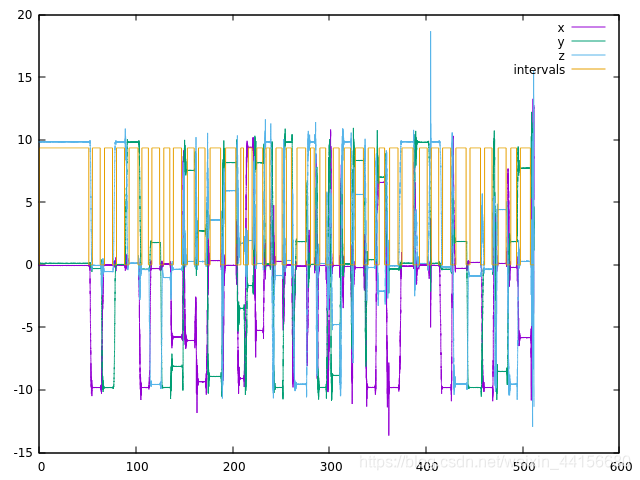
车联网obd终端盒子(惯性导航的陀螺仪量程问题)
这次谈谈陀螺仪的工程问题,采样st的lsm6d3的芯片做陀螺仪算法时,发现如下问题: 当陀螺仪的量程设置为245dps时,发现通过陀螺仪计算出来的旋转矩阵下求得的加速度值和实际加速度计测得加速度值有差异。 从实验数据仿真来看,是因为陀螺仪采样到的角速度值存在突变时,计算加速度和加速度实测加速度值产生误差。 仔细研读lsm6ds3的datasheet,发现问题的根本原因是因为陀螺仪的AD采样之
惯性导航学习过程记录(旋转矩阵部分)
坐标系变换经常弄混淆,这里记录一下相关旋转的过程,代码是CSDN上下的,链接找不到了,直接搜索惯性导航程序,然后随便买一个就行了,程序大家写的都差不多。 最近从CSDN上下载的MATLAB程序都会出现中文显示乱码问题,解决方法:用记事本打开.m文件,重新另存为,格式改成ANSI,然后回到matlab里面就能打开了。 1.绕单轴旋转 1.1 绕x轴旋转

惯性导航基础知识学习----01惯性器件相关
🌈武汉大学惯性导航课程合集是入门惯导的精品课程~ 作为导航路上的鼠鼠我,要开始学习惯性导航了~ 需要达到的要求是大致了解惯导的原理等~ 后期会陆续更新惯导相关的知识和笔记等~ 🐬 本blog为 武汉大学惯性导航课程 的记录~ 感谢团队提供的开源课件ppt和相关代码~ ☘️概览:惯性器件相关 🌺省流:1️⃣介绍一下惯性传感器(加速度计和陀螺仪;2️⃣介绍一下二维的惯性导航系统(平台式和捷联
《多传感器融合定位》惯性导航基础(一)
未完待续~:《多传感器融合定位》惯性导航基础(二). 惯性导航基础习题一 一、仿真imu数据,并用Allan方差进行分析1.使用gnss-ins-sim进行imu数据仿真(1)官方例程demo_allan.py代码解析(2)官方例程demo_allan.py运行 2.使用imu_utils进行imu数据仿真 二、设计一种转台旋转方案,并基于仿真数据进行内参求解的验证1.使用gnss-ins-
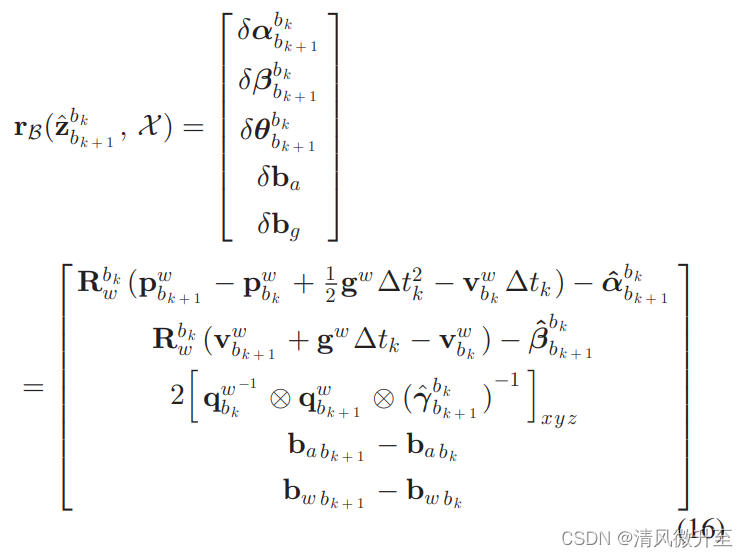
vSLAM中IMU预积分的作用--以惯性导航的角度分析
作为一个学过一点惯导的工程师,在初次接触视觉slam方向时,最感兴趣的就是IMU预积分了。但为什么要用这个预积分,在看了很多材料和书后,还是感觉模模糊糊,云里雾里。 在接触了vSLAM的更多内容后,站在历史研究者的角度去分析,得到了一个更为清晰的作用分析。 首先,需要明确IMU与相机这两种传感器的互补作用,这是为什么要用IMU的原因。直接贴出程博书中的内容,总结的比较全面了。 总之,就是相机成

室内定位中的惯性导航介绍
步行者航位推算(Pedestrian Dead Reckoning,PDR) 主要是在无信标环境下使用惯性测量单元(Inertial Measurement Unit,IMU)感知人员在行进过程中的加速度、角速度、磁力和压力等数据,并利用这些数据对行进人员进行步长与方向的推算,从而达到对人员进行定位跟踪的目的,其中主要涉及的过程有步态检测、步长和方向计算。 PDR原理图: PDR初始
vSLAM中IMU预积分的作用--以惯性导航的角度分析
作为一个学过一点惯导的工程师,在初次接触视觉slam方向时,最感兴趣的就是IMU预积分了。但为什么要用这个预积分,在看了很多材料和书后,还是感觉模模糊糊,云里雾里。 在接触了vSLAM的更多内容后,站在历史研究者的角度去分析,得到了一个更为清晰的作用分析。 首先,需要明确IMU与相机这两种传感器的互补作用,这是为什么要用IMU的原因。直接贴出程博书中的内容,总结的比较全面了。 总之,就是相机成

自动驾驶::惯性导航原理::apollo
1. 惯性导航 目前GNSS+IMU构成的组合导航系统是主流的定位系统方案,惯性导航系统是唯一可以输出完备的六自由度数据的设备、数据更新频率高、是定位信息的融合中心。 惯导中使用的核心算法主要包括3种:1. 惯性导航解算算法;2. 组合导航的卡尔曼滤波器的耦合。3. 环境特征信息与惯性导航融合。 2. 硬件及原理 惯性导航系统(INS)是

【惯性导航】隧道、高架桥、高楼林立弱信号环境室外定位_惯导模块
汽车行驶在路上,视野可能会受到周边的树木、同行的卡车、城市楼群的遮挡,卫星导航系统容易受到周围环境的影响,例如树木楼房等,造成多路径效应,使得定位结果精度降低甚至丢失,尤其是在隧道或者室内环境中,卫星导航系统基本无法使用。为完善汽车在弱信号环境下卫星定位无法提供准确位置信息的技术缺陷,SKYLAB研发推出了基于卫星导航与惯性导航自适应组合车载导航系统的车载组合导航模块。 惯导模块产品的推出弥补了

惯性导航解决方案ADIS16448+tbus-tiny_ekf测评
忽然感觉TBUS牛逼,真的是深钻了一些算法,真正解决了些问题,单靠IMU实现定位都做出来了,牛逼。 最新的他们好像是用中心差分卡尔曼滤波了,可以看到他们在状态估计上花了很大的力气。 转载自:https://mp.weixin.qq.com/s/m-oBzlFWMuzRkwJrM1J0wg 惯性导航解决方案ADIS16448+tbus-tiny_ekf测评 原创 凌拓智能TBUS TB