本文主要是介绍长航时陀螺惯性导航系统有哪些?,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
从1910年至今,陀螺仪的发展经历了四代,第一代是滚珠轴承支承陀螺,第二代是液浮气浮陀螺,第三代是挠性支承(即允许支承位置有一定变形)的转子陀螺,第四代包括静电陀螺、激光陀螺、光纤陀螺和MEMS陀螺等,未来可能有超导陀螺仪。

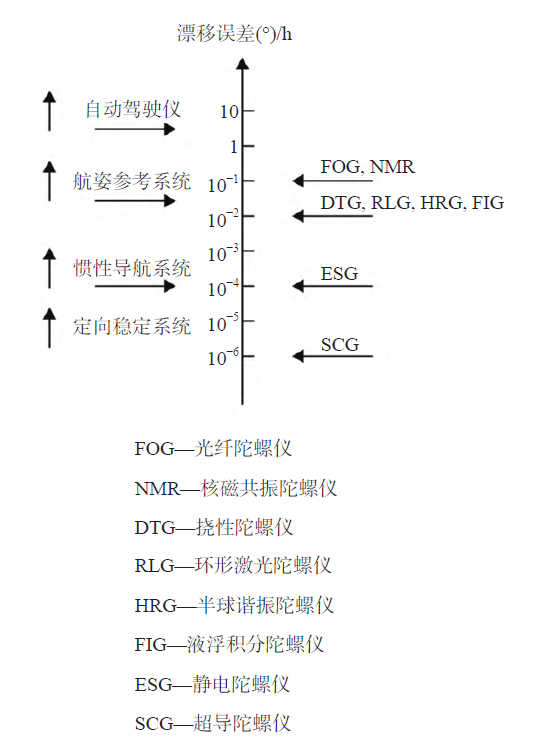
1、静电陀螺仪(亦称电浮陀螺仪,electrostatic (suspended) gyroscope)
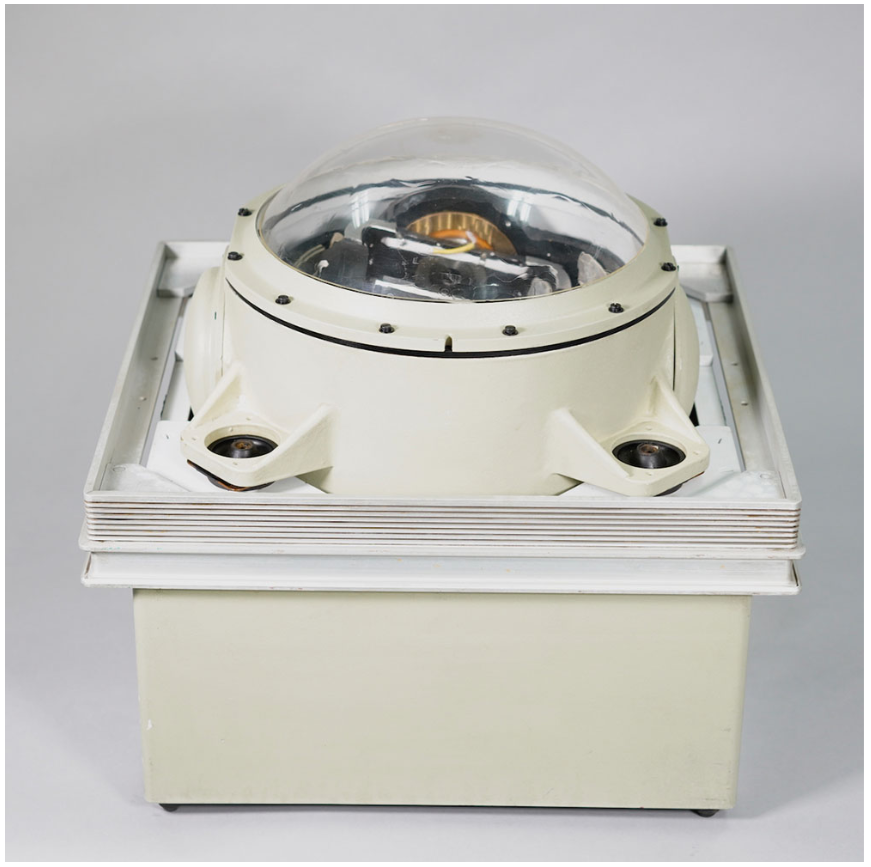
利用超高真空中的强电场产生支承力,取代陀螺马达和万向支架的三对机械轴承,构成一个理想的轴承系统,即既没有机械接触,又没有气体阻力的轴承。在陀螺转子加转到需要的转速之后,加转电源被切断,转子在惯性作用下将长时间自转。
由于静电陀螺仪采用非接触支承,不存在摩擦,所以精度很高,漂移率低达0.0000000001°/h(太空失重环境)。它适用于长时间工作的环境,但不能承受较大的冲击和振动,结构和制造工艺复杂,成本较高。
国外研制静电陀螺仪主要是美国、法国和俄罗斯,1976年清华大学研制成功静电陀螺三轴稳定平台,见下图。
2、激光陀螺
激光利用光学中的Sagnac效应测量运载体旋转运动的激光陀螺仪。
萨格纳克效应( Sagnac Effect)是1913年萨格纳克发明的一种可以旋转的环形干涉仪。将同一光源发出的一束光分解为两束,让它们在同一个环路内沿相反方向循行一周后会合,然后在屏幕上产生干涉,当在环路平面内有旋转角速度时,屏幕上的干涉条纹将会发生移动,这就是萨格纳克效应。
简单来说,当环形光路相对惯性空间不转动时,顺、逆时针的光程长度相同。当环形光路相对惯性空间有一转动角速度ω时,顺、逆信号传播的时间不一样,从而求出角度。

激光陀螺仪具有较大的动态范围和高速率特性,精度高,启动时间短,可靠性高,寿命长。缺点为存在闭锁现象(低于一定低角速率时,不敏感角速度,即无法测量),价格昂贵,体积大。
下面是国外典型长航时激光陀螺捷联惯导系统参数(Strapdown,捷联)。

多种技术手段可提高激光陀螺导航的精度,其中旋转调制技术即在惯导系统中引入附加的机械转动,使得惯性器件的误差引起的导航误差在一个转动周期内能够正负抵消,是其中的核心技术之一。
3、光纤陀螺
光纤陀螺(FOG)使用与激光陀螺相同的原理,即Sagnac效应测量角度。但与激光陀螺不同的是,光纤陀螺利用一段光纤环代替了原来的光路。光纤可以绕制,其光路比激光陀螺光路大大增加,使得检测灵敏度和分辨率提高了几个数量等级,克服了激光陀螺的闭锁现象。其优点为无运动部件,价格低廉,启动时间短,动态范围宽,为捷联惯导系统传感器,拥有极强竞争力和广泛的市场,缺点为受温度影响较大。
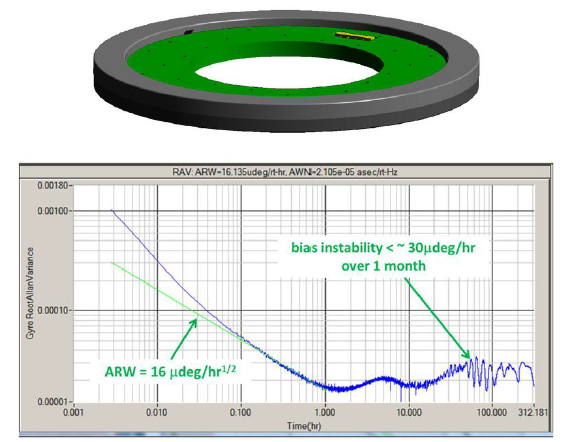
国外公开报道的高精度光纤陀螺长时间零偏稳定性已经达到0.00001°/h 量级,研制单位主要包括法国iXBlue 公司、美国Honeywell 公司等。iXBlue 公司通过增大光纤环圈的直径(从9 cm 到50 cm 甚至到200 cm)、增加光纤长度(从5 km到15 km)、采用相对强度噪声(Relative intensity noise,RIN)抑制措施提升光纤陀螺精度。其最新设计的直径大小为200cm、长度为15km 的干涉式光纤陀螺可满足高精度光纤惯导系统1nm(海里)/60d的定位要求。
下图是Honeywell研发的“参考级0.00003°/h”光纤陀螺原型机,陀螺直径为27 英寸,光纤环长度为8 公里。
4、MEMS陀螺仪
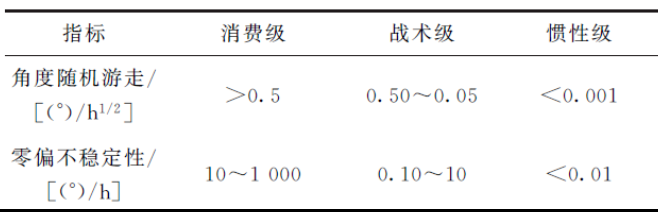
MEMS即机械电子系统,是采用纳米技术加工出的新一代微型机电装置,是一种振动式角速率传感器,其基本原理为将一种振动模式激励到另一种振动模式上,其幅度与输入的角度成正比。
国外主要研制公司有美国Sperry、Draper实验室、通用电器、Watson和德州仪器等。MEMS优点为成本低,体积小,具有广泛的市场,缺点为加工工艺高。下表是各等级MEMS陀螺仪的主要参数。
5、小结
综上所示,我们初略得出个简单的结论:
1)静电陀螺仪精度最高,按照其0.0001°/h,航速30nm(海里)/h,航行60d计算,理论定位误差为0.08nm/60d。
2)光纤陀螺仪次之,直径200cm、长度为15km 的干涉式光纤陀螺仪,可满足1nm/60d导航需求。
3)其次是激光陀螺仪,两轴激光陀螺仪可达0.071nm/d,60天为4.3nm/60d。
4)MEMS陀螺仪最差。
参考文献
长航时激光陀螺惯性导航系统技术发展现状及趋势_李鼎_2023.09
一种长航时惯导定位误差评估的新方法_郭正东_2023.07
基于旋转调制技术的高精度陀螺寻北仪_薛海建_2015.04
https://wiki.dzsc.com/13556.html
光纤陀螺惯导稳定平台与旋转调制方法_胡小毛_2018
舰船长航时光纤陀螺惯导系统技术及未来发展_赵坤_2022.06
https://www.sensorexpert.com.cn/article/3428.html
浅谈静电陀螺仪_高钟玮_2011
静电场定位导航基础与技术系统_尚可_2023
https://www.eet-china.com/mp/a314602.html
这篇关于长航时陀螺惯性导航系统有哪些?的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





