本文主要是介绍【惯性导航】隧道、高架桥、高楼林立弱信号环境室外定位_惯导模块,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
汽车行驶在路上,视野可能会受到周边的树木、同行的卡车、城市楼群的遮挡,卫星导航系统容易受到周围环境的影响,例如树木楼房等,造成多路径效应,使得定位结果精度降低甚至丢失,尤其是在隧道或者室内环境中,卫星导航系统基本无法使用。为完善汽车在弱信号环境下卫星定位无法提供准确位置信息的技术缺陷,SKYLAB研发推出了基于卫星导航与惯性导航自适应组合车载导航系统的车载组合导航模块。
惯导模块产品的推出弥补了车载导航系统应用中,GPS卫星导航在树木遮挡、高楼林立、高架下以及隧道和地下停车场等弱信号环境无法提供准确的定位信息这一技术缺陷;满足了日益增长的车载导航对弱信号环境的高精度定位需求。
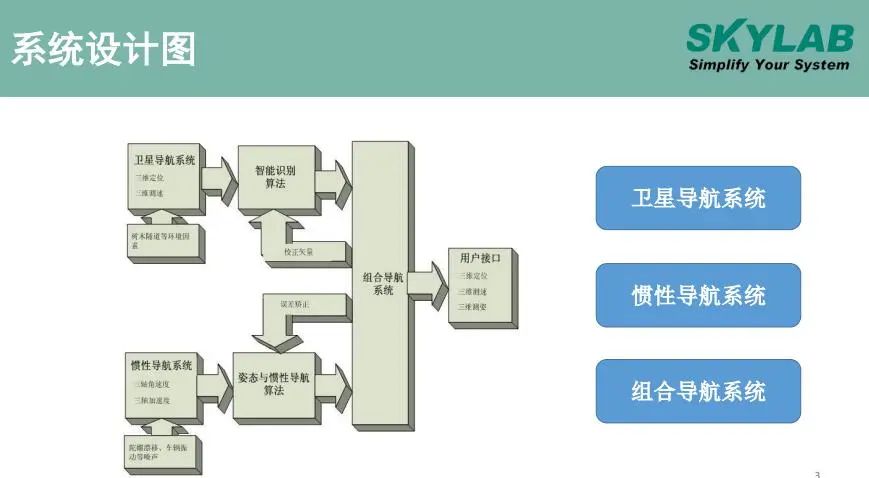
组合导航系统构成
惯导模块工作原理

在车载导航中接入基于GNSS/INS组合导航定位的高性能车载组合导航模块,充分利用惯性导航系统和卫星导航系统优点,凭借高精度六轴惯性器件和成熟的惯性算法,无需里程计或速度信号接入,获得最优的导航结果;尤其是当卫星导航系统无法工作时,利用惯性导航系统使得导航系统继续工作,保证导航系统的正常工作,提高车载导航系统的稳定性和可靠性。
惯导模块优势
 1、可发现并标校惯导模块误差,提高导航精度;
1、可发现并标校惯导模块误差,提高导航精度;
2、弥补卫星导航的信号缺损问题,提高导航能力;
3、正价观测冗余度,提高异常误差的监测能力,提高系统的容错功能;
4、提高导航系统的抗干扰能力,提高完好性。
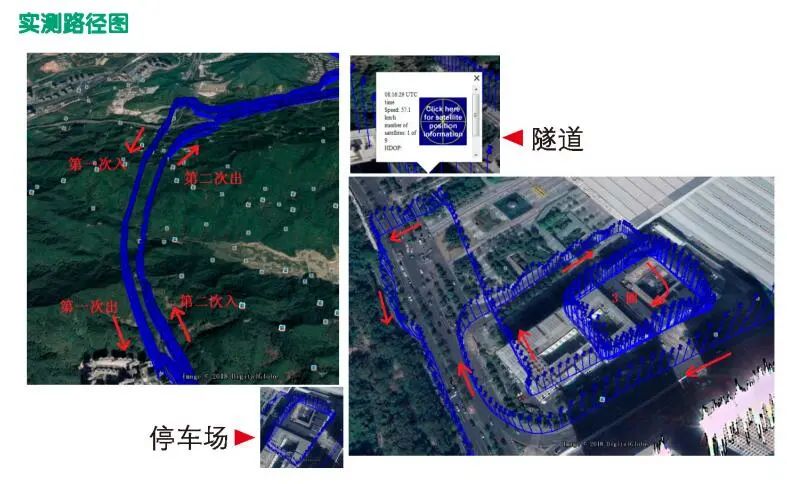
惯导模块实测路径图
卫星导航在隧道、地下停车场内无法定位,组合导航模块通过在多个隧道、地下停车场内测试,均表现出了高水平的导航定位性能。
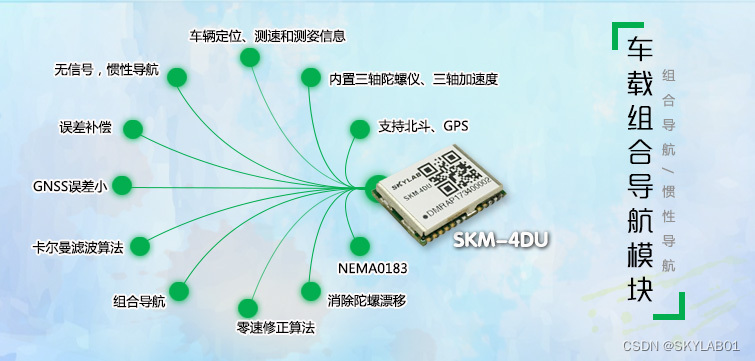
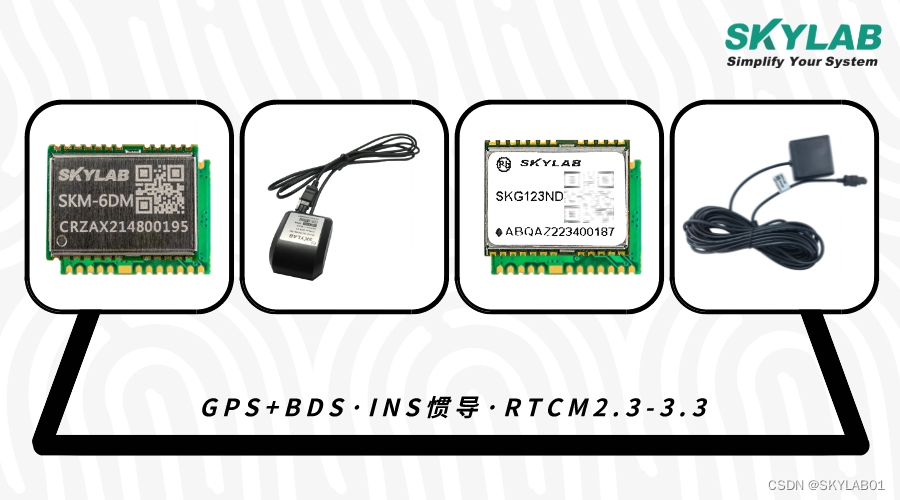
惯导模块介绍
双频惯导模块
SKM-6DM是一款高性能的面向车载导航领域的车载组合导航模块,模块包含高性能的同时支持GPS、北斗、GLONASS、Galileo、QZSS的卫星接收机芯片、支持L1+L5双频定位、三轴陀螺仪、三轴加速度等;通过在线的自适应组合导航算法,SKM-6DM提供实时高精度的车辆定位、测速和测姿信息,在GNSS系统的信号精度降低甚至丢失卫星信号时,不借助里程计信息,SKM-6DM利用纯惯性导航技术,也可在较长时间内单独对汽车载体进行高精度定位、测速和测姿。模块可以直接输出总里程数,方便客户进行里程计量。
SKG123ND是一款高性能的面向车载导航领域的车载组合导航模块,模块包含高性能的同时支持 GPS、北斗、 GLONASS、GALILEO、QZSS的卫星接收机芯片、支持 L1+L5 双频定位、三轴陀螺仪、三轴加速度等;通过在线的自适应组合导航算法,SKG123ND提供实时高精度的车辆定位、测速和测姿信息,在GNSS系统的信号精度降低甚至丢失卫星信号时,不借助里程计信息,SKG123ND利用纯惯性导航技术,也可在较长时间内单独对汽车载体进行高精度定位、测速和测姿。模块可以直接输出总里程数,方便客户进行里程计量。
该模组外形尺寸紧凑,兼容市场上国际主流导航定位模块,采用SMD焊盘,支持标准取放及回流焊接。
SKM2305NDR-40MXT是一款高性能的面向车载导航领域的车载组合导航模块,模块包含高性能的同时支持GPS、北斗、GLONASS、Galileo、QZSS的卫星接收机信号、支持L1+L5双频定位、三轴陀螺仪、三轴加速度等;通过在线的自适应组合导航算法,SKM2305NDR-40MXT提供实时高精度的车辆定位、测速和测姿信息,在GNSS系统的信号精度降低甚至丢失卫星信号时,不借助里程计信息,SKM2305NDR-40MXT利用纯惯性导航技术,也可在较长时间内单独对汽车载体进行高精度定位、测速和测姿。模块可以直接输出总里程数,方便客户进行里程计量。
双频惯导模块优势
-
高性能:三轴陀螺仪和三轴加速度计,结合自适应的扩展卡尔曼滤波算法,能消除陀螺漂移获高精度姿态航向信息,消除震动加速度和高精度速度信息,可防止导航数据漂移;
-
亚米级定位导航:利用纯惯性导航实现高精度定位,组合导航和纯惯导航技术自主切换,支持RTCM2.3-3.3协议,复杂环境可实现亚米级定位导航;
-
高可靠性:每个产品的传感器组件标定参数均不一样,这种唯一性可用于防止了系统盗版,从而提高了用户产品的可靠性;
-
误差补偿:为了使每个SKG123ND达到相同的性能指标,出厂前已经对SKG123ND的各个传感器组件进行了正交误差,温度漂移等误差补偿;
-
快速定位:冷启动:28s,温启动:28s,热启动:1s,辅助启动:5s;弱信号下具有较好的定位精度和位置有效性;
-
尺寸小巧,高度集成:16*12mm的常规尺寸,SMD邮票孔封装,紧凑模块化设计可节省用户产品空间;
-
使用方便:即插即用的标准通信协议NEMA 0183,无安装角度要求方便用户车载安装;
-
高品质:符合RoHS,FCC,CE认证标准。
-
工业级标准:-40~85℃
双频惯导模块应用

SKYLAB弱信号惯性组合导航模块SKM-6DM/SKG123ND提供实时高精度的车辆定位、测速和测姿信息,在GNSS系统的信号精度降低甚至丢失卫星信号时,不借助里程计信息,利用纯惯性导航技术,也可在较长时间内单独对汽车载体进行高精度定位、测速和测姿,解决弱信号环境下车辆定位漂移或无法接收卫星信号的问题。除车载导航外,高精度惯导模块在精细农业、无人机、无人驾驶农机、无人驾驶、共享单车等领域的应用市场正在显现出巨大的增长潜力。支持RTCM2.3-3.3协议的双频高精度组合导航定位模块SKM-6DM,SKM2305NDR更适用于对定位精度有一定要求的车载导航、安防交通等领域。
这篇关于【惯性导航】隧道、高架桥、高楼林立弱信号环境室外定位_惯导模块的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







