惯导专题

LIO-SAM: 紧耦合的激光与惯导里程计方案
点云PCL免费知识星球,点云论文速读。 标题:LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping 作者:Tixiao Shan, Brendan Englot, Drew Meyers, Wei Wang, Carlo Ratti, and Daniela Rus 来源:分享者 欢迎各位加入免费知识
从APM源码分析GPS、气压计惯导融合
最近事多,忙着开源自研飞控,现主要工作基本已经完成,代码最迟下月中旬开放,博客来不及更新,还请各位见谅,后面会抽空多更的咯!!! 自研飞控靓照如下:主控STM32F103RCT6,IMU组合:MPU6050、IST8310(DJI同款磁力计、5883已停产)SPL06_001(歌尔最新高精度气压计),GPS:M8N输出PVT 为方便大家学习,飞控工程支持Keil 、IAR两款编译器
【惯性传感器imu】—— WHEELTEC的惯导模块的imu的驱动安装配置和运行
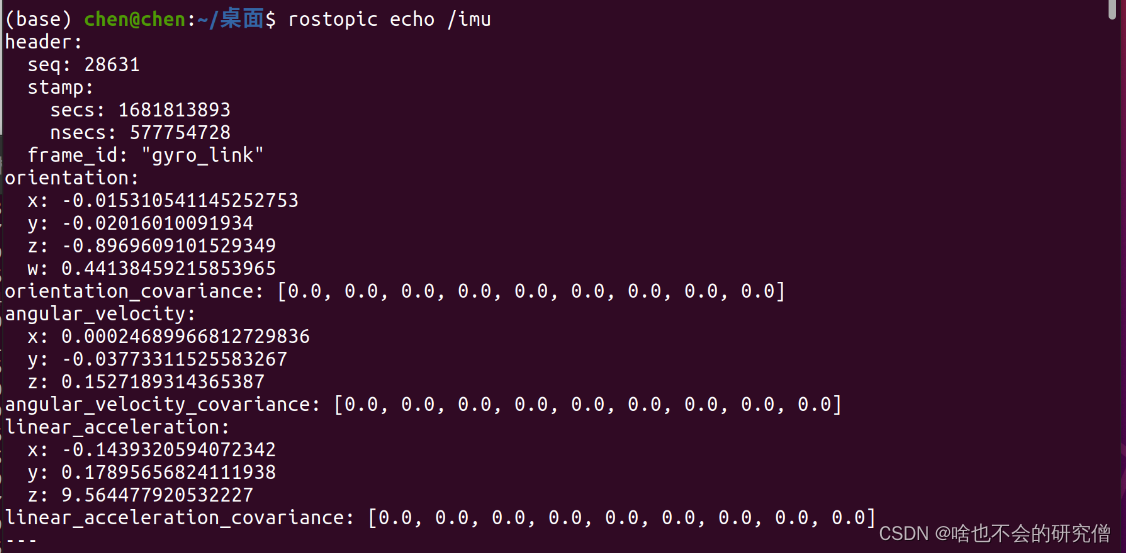
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、IMU驱动安装1. 安装依赖2. 源码的下载3. 编译源码(1) 配置固定串口设备(2) 修改luanch文件(3) 编译 二、启动IMU1. 运行imu2. 查看imu数据 总结 前言 WHEELTEC的惯导模块使用惯性测量单元(IMU),是一种用于感知车辆运动状态的关键技术。IM

组合惯导串口数据解析
首先是给串口usb以权限: sudo chmod 666 /dev/ttyUSB0 但是不能每次启动都执行一次,所以需要给一个永久的权限指令: sudo gedit /etc/udev/rules.d/70-ttyusb.rules KERNEL==“ttyUSB[0-9]*”, MODE=“0666” 然后就能让ttyUSB0-ttyUSB9默认的权限都变成了666,普通用户也可

GNSS模块的惯导技术:引领定位科技的前沿
全球导航卫星系统(GNSS)模块的惯导技术是一项颇具前瞻性的科技,它结合了全球定位系统和惯性导航技术,为各个领域的定位需求提供了更为精准和可靠的解决方案。本文将深入探讨GNSS模块的惯导技术,以及它如何在多个领域中发挥关键作用。 1. 高精度导航: 惯导技术通过使用加速度计和陀螺仪等传感器,不仅可以提供高精度的位置信息,还能在GNSS信号受阻或不可用的环境中维持导航的连续性。这对于需要

解析式粗对准 matlab,未知纬度条件下捷联惯导直接解析式粗对准方法与流程
本发明提供的是一种未知纬度条件下捷联惯导系统的粗对准方法。 背景技术: 捷联惯导初始对准是系统工作的基本前提,其核心任务是获取载体坐标系相对导航坐标系的姿态关 系。近年来,捷联惯导初始对准已经形成了许多成熟的方法,如基于最优估计的对准方法、罗经对准法、 基于矢量定姿的对准方法等等,诸多方法在应用过程中都需要精确的纬度信息支持。目前,纬度信息常来 源于卫星或无线电定位手段,而对于水下、地下、密林
在gazebo里搭建一个livox mid360 + 惯导仿真平台测试 FAST-LIO2
在gazebo里搭建一个livox mid360 + 惯导仿真平台测试 FAST-LIO2 前言立方体平台加入 livox mid360 激光雷达加入IMU模块调整底盘大小 并设计调用接口测试 Fast-Lio2 前言 livox mid360 在官网一直没有货,在gazebo里可以仿真该雷达形式的点云。 但是其只发布雷达的数据,没有imu数据,实际的雷达是可以发布既有雷达也有

基于STM32读取SBG Ellipse A型号惯导数据
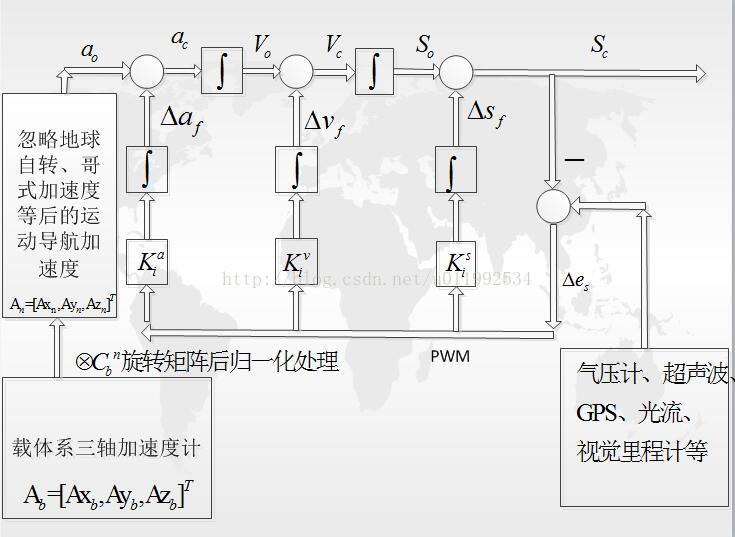
之前在飞控上用的都是mpu6050,但AUV在执行任务时主要在水下环境,收不到GPS信号,因此对INS的精度要求较高,在姿态解算时要考虑地球自转等因素,因此需要一款惯导器件能够感受到地球自转,经测量,SBG公司生产的Ellipse A并不能满足要求。下面介绍一下采集系统的软件架构。 组合导航系统需要同时采集多种传感器,进行多传感器融合,以提高导航系统精度。初步准备用SBG和GPS进行融合,将GP
一.开发记录之AHRS、惯导传感器SBG-Ellipse-N传感器配置和使用
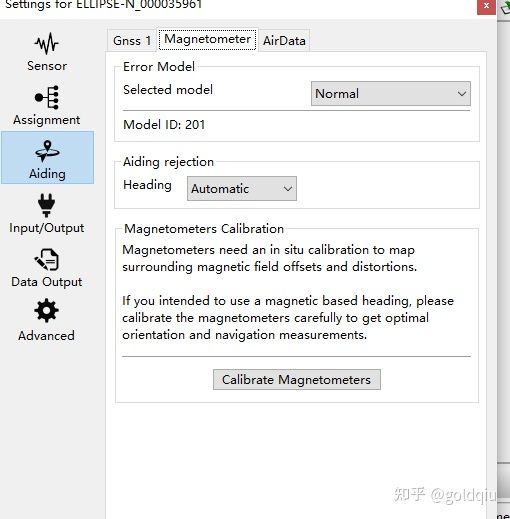
一、 磁力计校准 Window上位机连接上模块 在室外点击Calibrate Magnetometers,然后按手册进行校准,让传感器尽可能在多的不同方向旋转。校准结束,按下“Calibrate”按钮,点击OK,上位机会有参数值示意,达到1左右就可以了。 二、 惯导ROS驱动yaml文件修改 惯导ROS驱动包yaml文件可以修改传感器参数,但是不建议。建议的做法是在上位机进行修改,修改

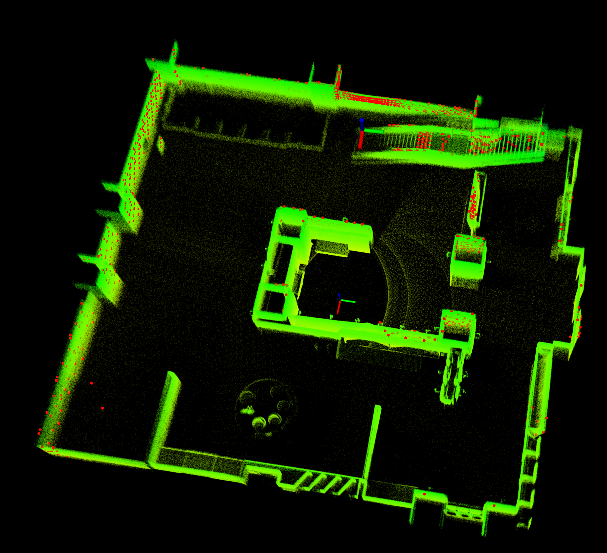
二十六-香港大学火星实验室FAST-LIO2框架跑自录数据集(Mid-70和SBG-Ellipse-N惯导)
专栏系列文章如下: 一:Tixiao Shan最新力作LVI-SAM(Lio-SAM+Vins-Mono),基于视觉-激光-惯导里程计的SLAM框架,环境搭建和跑通过程_goldqiu的博客-CSDN博客 二.激光SLAM框架学习之A-LOAM框架---介绍及其演示_goldqiu的博客-CSDN博客 三.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---1.项目文件介绍(除
针对自主泊车的多相机视觉惯导同时定位与建图方案
文章:Multi-Camera Visual-Inertial Simultaneous Localization and Mapping for Autonomous Valet Parking 作者:Marcus Abate, Ariel Schwartz, Xue Iuan Wong, Wangdong Luo, Rotem Littman, Marc Klinger, Lars Kuhn

【惯性导航】隧道、高架桥、高楼林立弱信号环境室外定位_惯导模块
汽车行驶在路上,视野可能会受到周边的树木、同行的卡车、城市楼群的遮挡,卫星导航系统容易受到周围环境的影响,例如树木楼房等,造成多路径效应,使得定位结果精度降低甚至丢失,尤其是在隧道或者室内环境中,卫星导航系统基本无法使用。为完善汽车在弱信号环境下卫星定位无法提供准确位置信息的技术缺陷,SKYLAB研发推出了基于卫星导航与惯性导航自适应组合车载导航系统的车载组合导航模块。 惯导模块产品的推出弥补了
北斗导航 | 卫星/惯导组合导航方法
===================================================== github:https://github.com/MichaelBeechan CSDN:https://blog.csdn.net/u011344545 ===================================================== 卫星/惯导组合导

015游移方位惯导系统误差方程推导
算是按时完成了!包括速度误差方程、位置误差方程、平台姿态误差方程、平台游移方位角误差方程和初始对准时的误差方程。 发现更新博文也好费时间!! 天天立flag!打算今天把平台式惯导的初始对准部分系统的看一下,然后再详细看看高度通道,平台式惯导就可以告一段落!

AUTOSAR汽车电子嵌入式编程精讲300篇-基于嵌入式惯导技术的移动靶车设计(中)
目录 3.3 CAN总线通讯模块开发与验证 3.3.1 CAN总线协议与硬件构成 3.3.2 CAN协议层报文与帧结构格式研究