本文主要是介绍二十六-香港大学火星实验室FAST-LIO2框架跑自录数据集(Mid-70和SBG-Ellipse-N惯导),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
专栏系列文章如下:
一:Tixiao Shan最新力作LVI-SAM(Lio-SAM+Vins-Mono),基于视觉-激光-惯导里程计的SLAM框架,环境搭建和跑通过程_goldqiu的博客-CSDN博客
二.激光SLAM框架学习之A-LOAM框架---介绍及其演示_goldqiu的博客-CSDN博客
三.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---1.项目文件介绍(除主要源码部分)_goldqiu的博客-CSDN博客
四.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---2.scanRegistration.cpp--前端雷达处理和特征提取_goldqiu的博客-CSDN博客
五.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---3.laserOdometry.cpp--前端雷达里程计和位姿粗估计_goldqiu的博客-CSDN博客
六.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---4.laserMapping.cpp--后端建图和帧位姿精估计(优化)_goldqiu的博客-CSDN博客
七.激光SLAM框架学习之A-LOAM框架---速腾Robosense-16线雷达室内建图_goldqiu的博客-CSDN博客
八.激光SLAM框架学习之LeGO-LOAM框架---框架介绍和运行演示_goldqiu的博客-CSDN博客
九.激光SLAM框架学习之LeGO-LOAM框架---速腾Robosense-16线雷达室外建图和其他框架对比、录包和保存数据_goldqiu的博客-CSDN博客
十.激光SLAM框架学习之LeGO-LOAM框架---算法原理和改进、项目工程代码_goldqiu的博客-CSDN博客
十一.激光惯导LIO-SLAM框架学习之LIO-SAM框架---框架介绍和运行演示_goldqiu的博客-CSDN博客
十二.激光SLAM框架学习之livox-loam框架安装和跑数据集_goldqiu的博客-CSDN博客
十三.激光SLAM框架学习之livox-Mid-70雷达使用和实时室外跑框架_goldqiu的博客-CSDN博客
十四.激光和惯导LIO-SLAM框架学习之惯导内参标定_goldqiu的博客-CSDN博客
十五.激光和惯导LIO-SLAM框架学习之惯导与雷达外参标定(1)_goldqiu的博客-CSDN博客
十六.激光和惯导LIO-SLAM框架学习之配置自用传感器实时室外跑LIO-SAM框架_goldqiu的博客-CSDN博客
十七.激光和惯导LIO-SLAM框架学习之IMU和IMU预积分_goldqiu的博客-CSDN博客
十八.多个SLAM框架(A-LOAM、Lego-loam、LIO-SAM、livox-loam)室外测试效果粗略对比分析_goldqiu的博客-CSDN博客
十九.激光和惯导LIO-SLAM框架学习之项目工程代码介绍---代码框架和一些文件解释_goldqiu的博客-CSDN博客
二十.激光、视觉和惯导LVIO-SLAM框架学习之相机内参标定_goldqiu的博客-CSDN博客
二十一.激光、视觉和惯导LVIO-SLAM框架学习之相机与雷达外参标定(1)_goldqiu的博客-CSDN博客
二十二.香港大学火星实验室R3LIVE框架跑官方数据集_goldqiu的博客-CSDN博客
二十三.激光和惯导LIO-SLAM框架学习之LIO-SAM项目工程代码介绍---基础知识_goldqiu的博客-CSDN博客
二十四-香港大学火星实验室FAST-LIO2框架跑官方数据集
二十五.SLAM中Mapping和Localization区别和思考
更改文件:
config/avia.yaml
lid_topic: "/livox/lidar"imu_topic: "/imu_raw"time_sync_en: true # ONLY turn on when external time synchronization is really not possibleextrinsic_R: [ 1, 0, 0,0, 1, 0,0, 0, 1]主要是雷达和惯导的话题。time_sync_en要为true,extrinsic_R为雷达和惯导的旋转矩阵,我的正好是单位阵。
保存pcd:
pcd_save:pcd_save_en: true运行:
roslaunch livox_ros_driver livox_lidar_msg.launch
roslaunch fast_lio mapping_avia.launch效果:
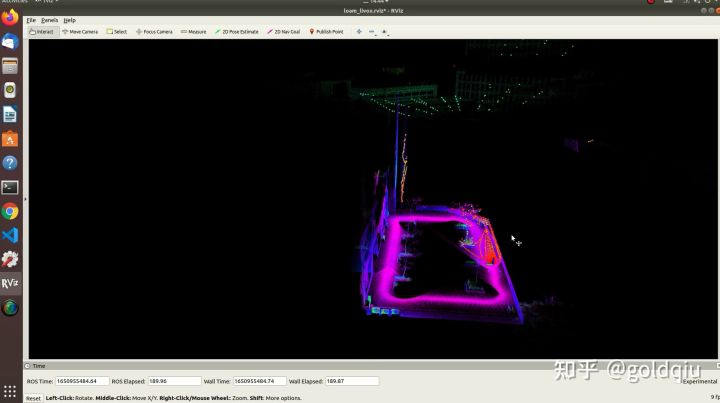
CC显示:

ps:
由于我录制的时候没有形成回环(没有经过起点),导致Z轴有点不重合。录制的时候注意形成回环即可。
这篇关于二十六-香港大学火星实验室FAST-LIO2框架跑自录数据集(Mid-70和SBG-Ellipse-N惯导)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






