lio2专题

Fast-LiO2中涉及到的算法学习
弄懂Fast-lio2需要看的学习资料 感谢知乎Poao的文章,给我学习起到了很大帮助! 总览 雷达惯性里程计论文阅读笔记—FAST-LIO (一) 雷达惯性里程计论文阅读笔记—FAST-LIO2 (二) 卡尔曼滤波 如何通俗并尽可能详细地解释卡尔曼滤波? - 知乎 FAST-LIO的状态估计过程与卡尔曼滤波过程是高度相似的! 卡尔曼滤波实际上是一种优化估计算法,不是我们通俗意义上理解的
FAST-LIO2:论文和算法解析
文章目录 摘要一、简介二、相关工作2.1雷达惯导里程计2.2 建图过程中的动态数据结构 三、系统架构四、状态估计A. 卡尔曼模型1.状态转换模型2.测量模型 B.迭代卡尔曼滤波1. 预测过程2. 残差计算3.迭代更新 五、建图A.地图管理B.树的结构与创建1.数据结构2.ikd树的创建 C.地图的增量式更新1.基于树降采样操作的点插入2.基于延迟标签的逐框删除3.属性更新 D.平衡的恢复1
在gazebo里搭建一个livox mid360 + 惯导仿真平台测试 FAST-LIO2
在gazebo里搭建一个livox mid360 + 惯导仿真平台测试 FAST-LIO2 前言立方体平台加入 livox mid360 激光雷达加入IMU模块调整底盘大小 并设计调用接口测试 Fast-Lio2 前言 livox mid360 在官网一直没有货,在gazebo里可以仿真该雷达形式的点云。 但是其只发布雷达的数据,没有imu数据,实际的雷达是可以发布既有雷达也有

二十六-香港大学火星实验室FAST-LIO2框架跑自录数据集(Mid-70和SBG-Ellipse-N惯导)
专栏系列文章如下: 一:Tixiao Shan最新力作LVI-SAM(Lio-SAM+Vins-Mono),基于视觉-激光-惯导里程计的SLAM框架,环境搭建和跑通过程_goldqiu的博客-CSDN博客 二.激光SLAM框架学习之A-LOAM框架---介绍及其演示_goldqiu的博客-CSDN博客 三.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---1.项目文件介绍(除
FAST-LIO2论文阅读
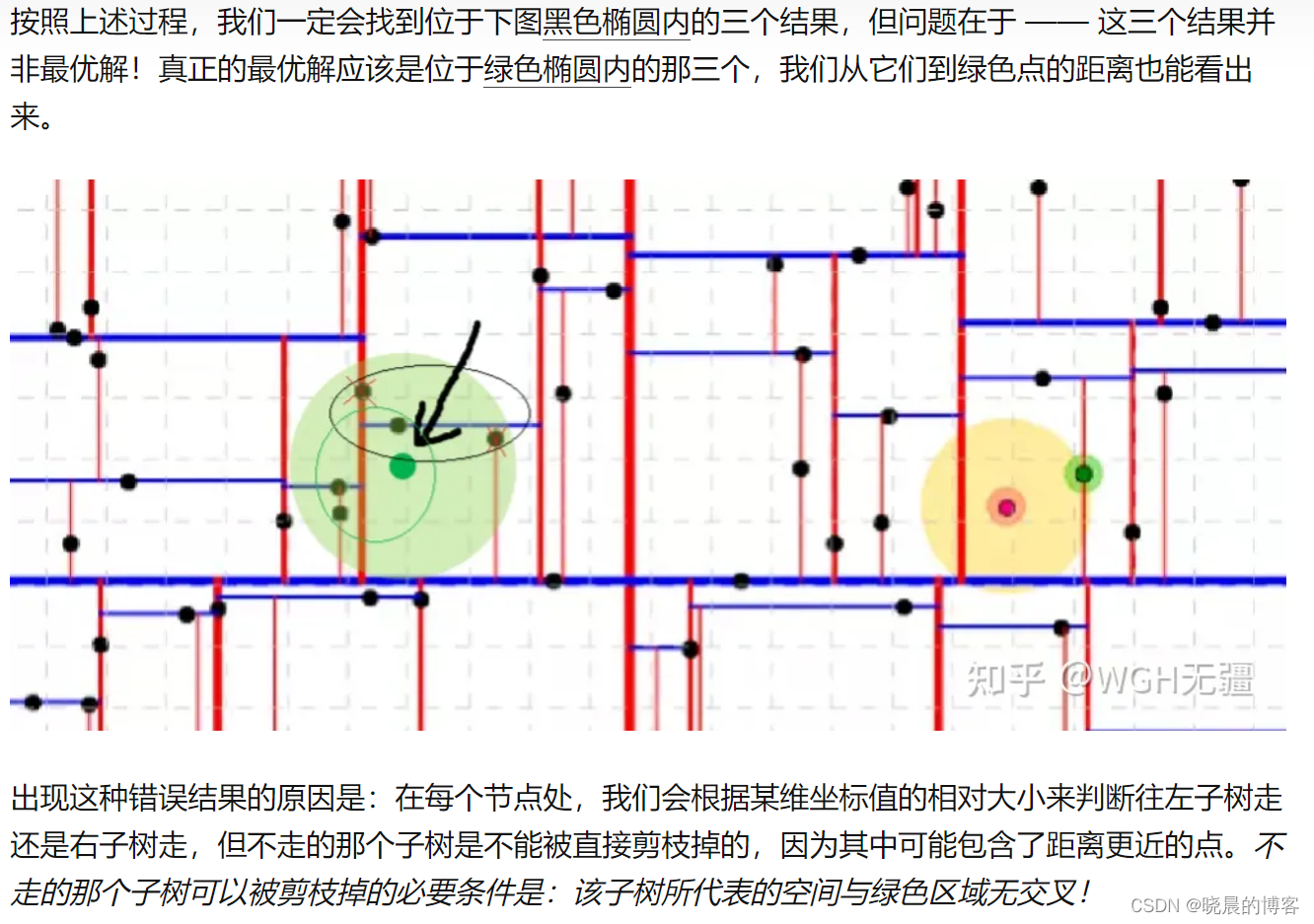
目录 迭代扩展卡尔曼滤波增量式kd-tree(ikd-tree)增量式维护示意图ikd-tree基本结构与构建ikd-tree的增量更新(Incremental Updates)逐点插入与地图下采样使用lazy labels的盒式删除属性更新 ikd-tree重平衡平衡准则重建及并行重建子树 KNN搜索 之前写的一个关于FAST-LIO论文阅读的总结,可以参考FAST-LIO论
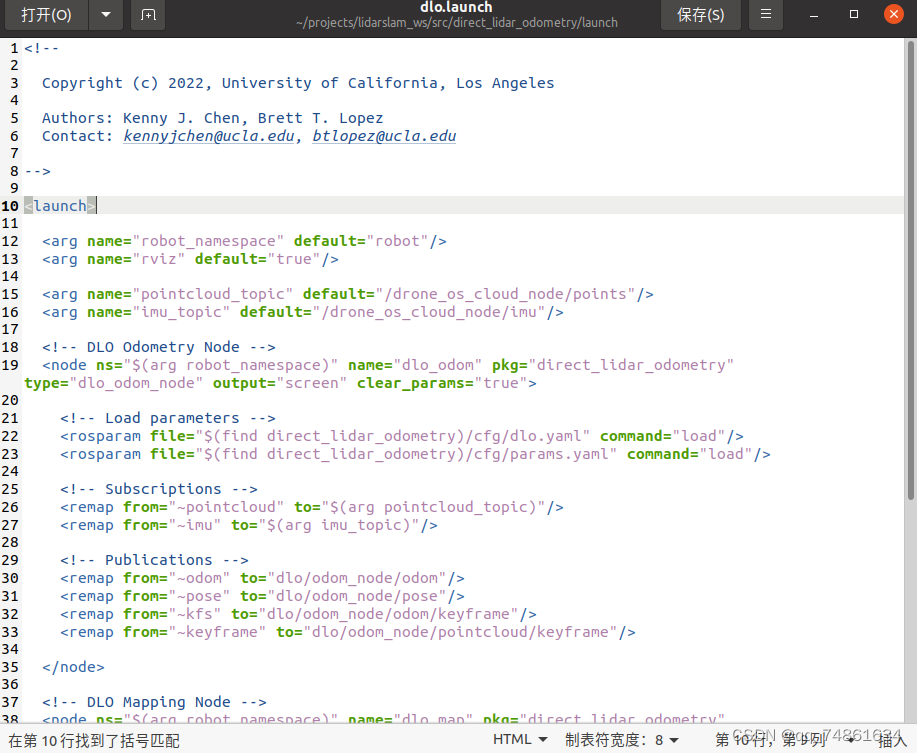
在ubuntu20.04下编译并运行Point-LIO、FAST_LIO2、Faster-LIO、DLO、LeGO-LOAM、LIO-SAM(即部分问题解决)
源码下载: https://github.com/engcang/SLAM-application 在运行算法建图的步骤: 1、将源码下载到ros的工作环境中; 2、根据系统配置修改源码: 比如:在ubuntu20.04中运行LeGO-LOAM和LIO-SAM需要将源码CMakeList.txt中修改为c++14; 3、只有发布和接收的话题相同才会出现点云。 一、Point-LIO