sbg专题
SBG EllipseE型号IMU 用ROS的驱动sbg_driver读取数据
一、SBG 驱动下载 SBG Driver驱动下载 sudo apt-get install ros-melodic-sbg-driver SBG ROS Driver下载:在工作空间中运行 git clone https://github.com/SBG-Systems/sbg_ros_driver catkin工作空间文件夹中 catkin build 或者 catkin

SBG 航姿系统的测试与sbg center软件的使用
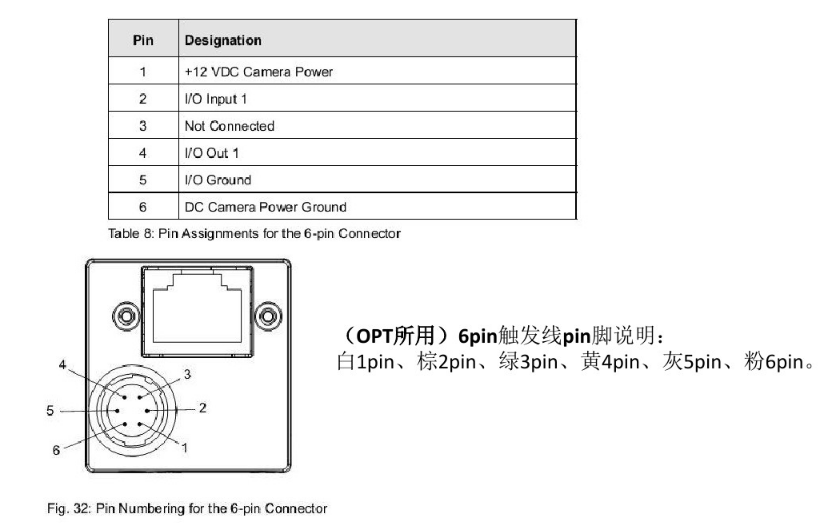
简介 SBG航姿系统包含了方位测量解决方案、动态传感器、姿态航向参考系统(A.H.R.S)、全球定位系统(GPS )精度增强的姿态航向参考系统、静态传感器、两轴倾角仪、三维罗盘等。产品广泛应用在 无人机、车辆运动分析、航天、机器人、航海等领域。 外观注意事项 如上图,左上角螺钉处有红色封漆,如没有封漆,可能是盗版模块 接口及功能 如图,该模块有MAIN&ANT两个接口。 MIAN

SBG Ellipse系列传感器Ubuntu下进行ROS节点配置
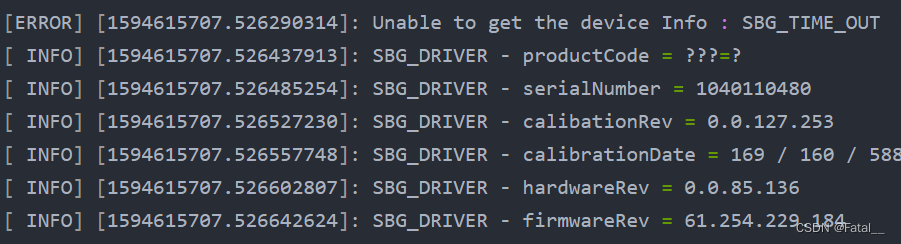
SBG ROS 节点配置 1. 概述2. SBG Driver3. SBG ROS Driver4. SBG Topic4.1 SBG自定义消息4.2 ROS标准消息 5. 问题及解决5.1 找不到设备5.1.1 错误信息5.1.2 解决办法 5.2 接收超时5.2.1 错误信息5.2.2 解决办法 5.3 总结 6. 参考链接7. 延伸阅读传感器配置节点程序分析经典SLAM 1

基于STM32读取SBG Ellipse A型号惯导数据
之前在飞控上用的都是mpu6050,但AUV在执行任务时主要在水下环境,收不到GPS信号,因此对INS的精度要求较高,在姿态解算时要考虑地球自转等因素,因此需要一款惯导器件能够感受到地球自转,经测量,SBG公司生产的Ellipse A并不能满足要求。下面介绍一下采集系统的软件架构。 组合导航系统需要同时采集多种传感器,进行多传感器融合,以提高导航系统精度。初步准备用SBG和GPS进行融合,将GP
一.开发记录之AHRS、惯导传感器SBG-Ellipse-N传感器配置和使用
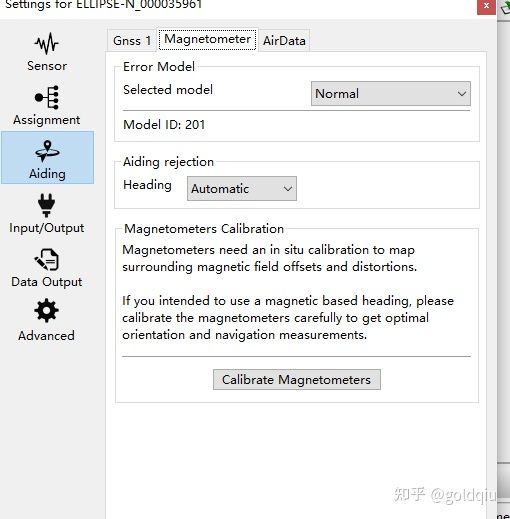
一、 磁力计校准 Window上位机连接上模块 在室外点击Calibrate Magnetometers,然后按手册进行校准,让传感器尽可能在多的不同方向旋转。校准结束,按下“Calibrate”按钮,点击OK,上位机会有参数值示意,达到1左右就可以了。 二、 惯导ROS驱动yaml文件修改 惯导ROS驱动包yaml文件可以修改传感器参数,但是不建议。建议的做法是在上位机进行修改,修改

SBG IMU最强替代者,Microinfinity推出Ellipse2系列替代品XNx100C
近日,韩国Microinfinity推出了与Ellipse2能原位替代,且软硬PIN对PIN的XNx100C系列产品,性能优于或等于SBG,但具有更高性价比。 XNx100C系列是基于高性能微机电系统(MEMS)的导航系统,利用IMU、GNSS、磁力计在静态和动态条件下提供准确的位置、速度、姿态数据。此外、还通过使用信号处理和温度补偿算法提供精确的惯性测量单元(IMU)数据。这是一种经过验证的应

SBG Ellipse2-N系列替代产品,XNS100C单天线惯性组合导航系统详解GNSS/INS
XNS100C是惯性导航(INS)/GNSS集成导航系统,包括三轴MEMS陀螺仪、MEMS加速度计和MEMS磁力计,带有启用RTK的GNSS接收器。它提供了由EKF补偿的位置速度姿态。此外,XNS100C提供了具有温度补偿技术的精确的IMU磁力计数据。此外,启用RTK的接收器比独立的GNSS接收器提供了更准确的位置。 上图显示了XNS100C算法的图形描述。即使是
论文阅读-Structure-based Generation(SBG) System for E2E NLG Challenge
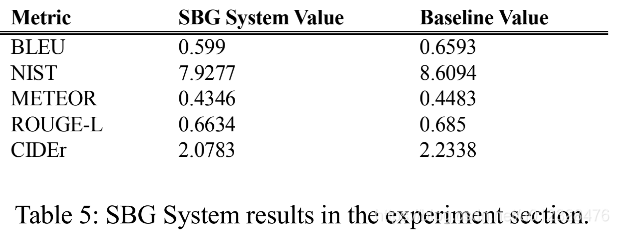
简介 两步走策略: 句子规划:设计句子结构,留有相应的空等待填充(对应下图Structure)文案实现:把值填到对应的位置(对应下图NL Reference) 系统流程图: RuleBased就是怎么规划和实现都是有对应策略的,有的比较取巧,有的也是根据经验。anyway效果还不错。 模块介绍 Structure Builder 首先,分析E2E数据集,根据MR的pragmati

SBG Ellipse2-D系列替代产品,XND100C双天线组合导航系统GNSS/INS
XND100C有双GNSS天线。基于双天线系统,XND100C可以使用真正的航向测量。航向的性能不收动态条件影响。它在静态和动态条件下都提供了良好的航向性能,同时不依赖于任何磁性传感器。该特性适用于需要精确航向信息或在低动态运动的条件下的应用项目。 XNS100C可以接收两个GNSS信息。可选择GPS和北斗,或GPS和GLONASS接收。 XND100C可以接收四个GNSS信

二十六-香港大学火星实验室FAST-LIO2框架跑自录数据集(Mid-70和SBG-Ellipse-N惯导)
专栏系列文章如下: 一:Tixiao Shan最新力作LVI-SAM(Lio-SAM+Vins-Mono),基于视觉-激光-惯导里程计的SLAM框架,环境搭建和跑通过程_goldqiu的博客-CSDN博客 二.激光SLAM框架学习之A-LOAM框架---介绍及其演示_goldqiu的博客-CSDN博客 三.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---1.项目文件介绍(除