同步电机专题

永磁同步电机高性能控制算法(13)后续篇—— 基于高阶扩张状态观测器(ESO)的无模型预测控制(MFPC)
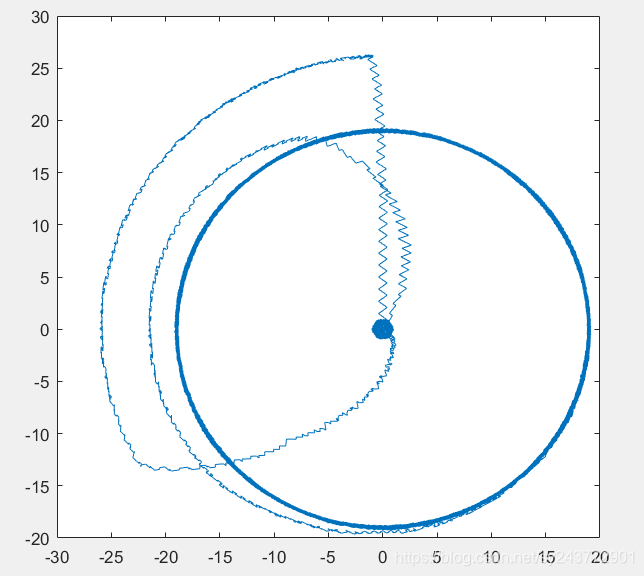
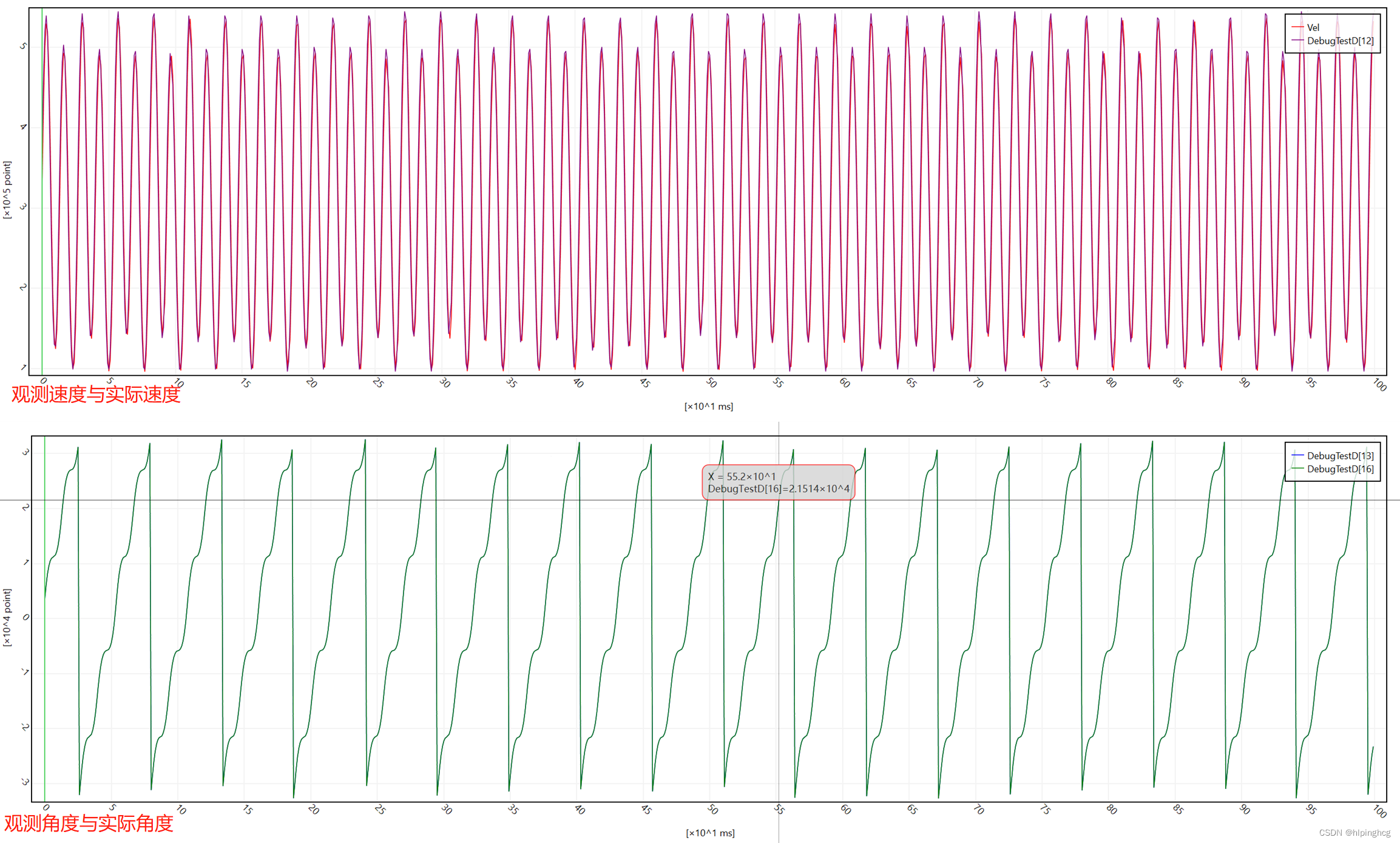
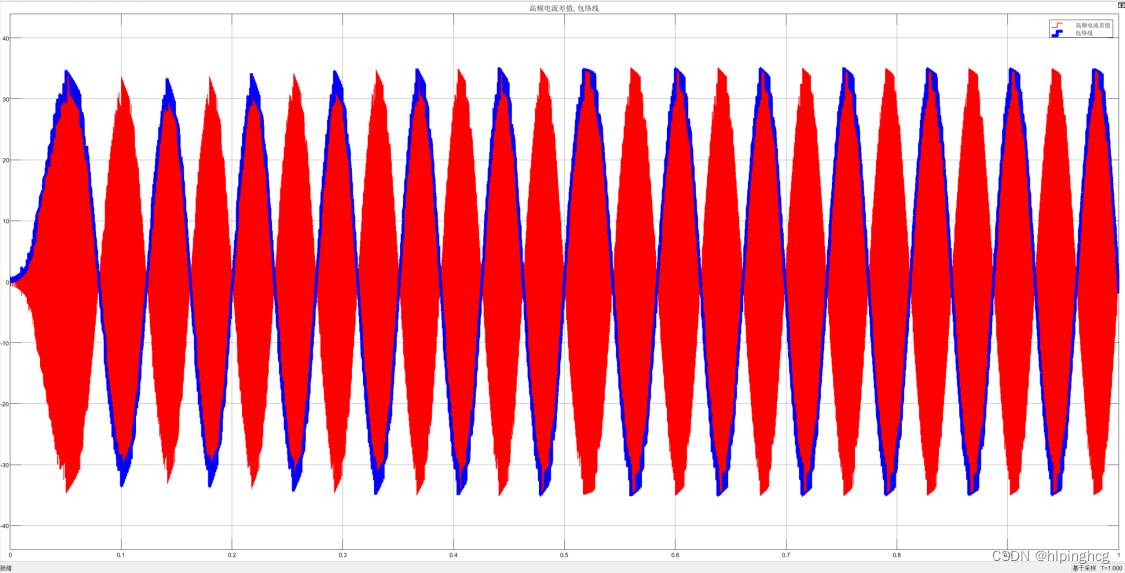
1.前言 前文已经介绍过了高阶ESO相对于传统ESO的优势。 https://zhuanlan.zhihu.com/p/703039702https://zhuanlan.zhihu.com/p/703039702 但是当时搭的ESO有点问题。把公式修正之后,发现前文用的改进四阶ESO无法使用。 今天来解释一下为什么改进4阶ESO无法使用。 2.为什么改进4阶ESO用不了? %扩展观测

基于矢量控制器的PMSM永磁同步电机速度控制系统simulink建模与仿真
目录 1.课题概述 2.系统仿真结果 3.核心程序与模型 4.系统原理简介 5.完整工程文件 1.课题概述 基于矢量控制器的PMSM永磁同步电机速度控制系统simulink建模与仿真,仿真输出电机转速跟踪曲线,PID控制器输出曲线以及Te输出曲线。 2.系统仿真结果 (完整程序运行后无水印) 3.核心程序与模型 版本:MATLAB2022a
永磁同步电机驱动死区补偿
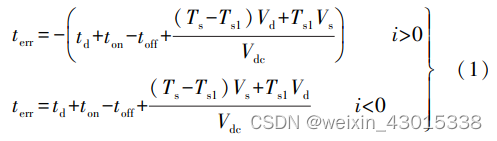
1 死区效应及补偿 1. 1 死区效应 在本文的电机控制嵌入式系统中,逆变器为三 相电压型桥式逆变电路,如图 1 所示。 在理想状态 下,上桥臂和下桥臂的控制信号满足互补通断原则, 即上桥臂开通时,下桥臂关断,反之亦然。 而在实际 应用中,开关管的通断需要一定的开通时间 t on 和关 断时间 t off。 为避免上桥臂和下桥臂发生短路,在 PWM 控制信号中加入死区时间 t d ,驱动信号如
永磁同步电机双矢量模型预测转矩控制MPTC
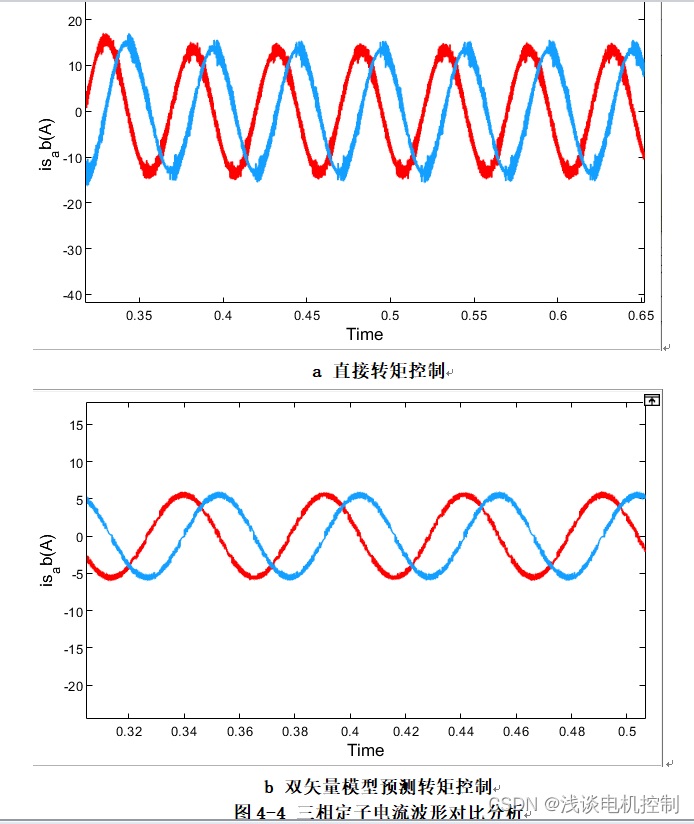
导读:本期文章主要介绍永磁同步电机双矢量模型预测转矩控制。由于传统直接转矩控制和单矢量的模型预测转矩控制转矩纹波较大,且在全速范围内的开关频率不固定,针对这一缺陷,引入双矢量MPTC。 如果需要文章中的仿真模型,关注微信公众号:浅谈电机控制,留言获取。 一、引言 由于传统直接转矩控制和单矢量MPTC控制方法的转矩脉动比较大、稳态性能不是很理想,无论是转矩的脉动还是定子电流的正弦度都有待改善。

基于双PI结构FOC闭环控制的永磁同步电机控制系统simulink建模与仿真
目录 1.课题概述 2.系统仿真结果 3.核心程序与模型 4.系统原理简介 5.完整工程文件 1.课题概述 基于双PI结构FOC闭环控制的永磁同步电机控制系统simulink建模与仿真。 2.系统仿真结果 3.核心程序与模型 版本:MATLAB2022a 64 4.系统原理简介 永磁同步电机(PMSM)基于双PI结构的磁场定向


永磁同步电机无感FOC模型参考自适应(MRAS)转速估计算法
文章目录 1、前言2、模型参考自适应控制(MRAS)的基本原理分析2.1 模型参考自适应系统的分类2.2 模型参考自适应系统的设计思路2.3 波波夫(PopoV)超稳定性理论 3、永磁同步电机无位置模型参考自适应系统模型分析3.1 参考模型与可调模型的确定3.2 参考自适应律的确定3.3 仿真3.3.1 核心模块(在滑膜观测器、龙伯格、非线性磁链观测器基础上修改)3.3.2 仿真效果 参考
永磁同步电机谐波抑制算法(4)——多同步旋转坐标系谐波电流抑制存在的问题以及改进办法
1.问题的引出 在之前的内容中以及讲了多同步旋转坐标系的五七次谐波电流的抑制。 永磁同步电机谐波抑制算法(1)——基于多同步旋转坐标系的五七次谐波电流抑制 - 知乎这段时间发现电机里面会存在五次谐波,然后学了学谐波抑制的方法。一般比较常用的是多同步旋转坐标系和PIR调节器。今天先讲一下多同步旋转坐标系。 Pony:永磁同步电机-谐波抑制这篇知乎下面有很多人在问问题,所…https://zhua
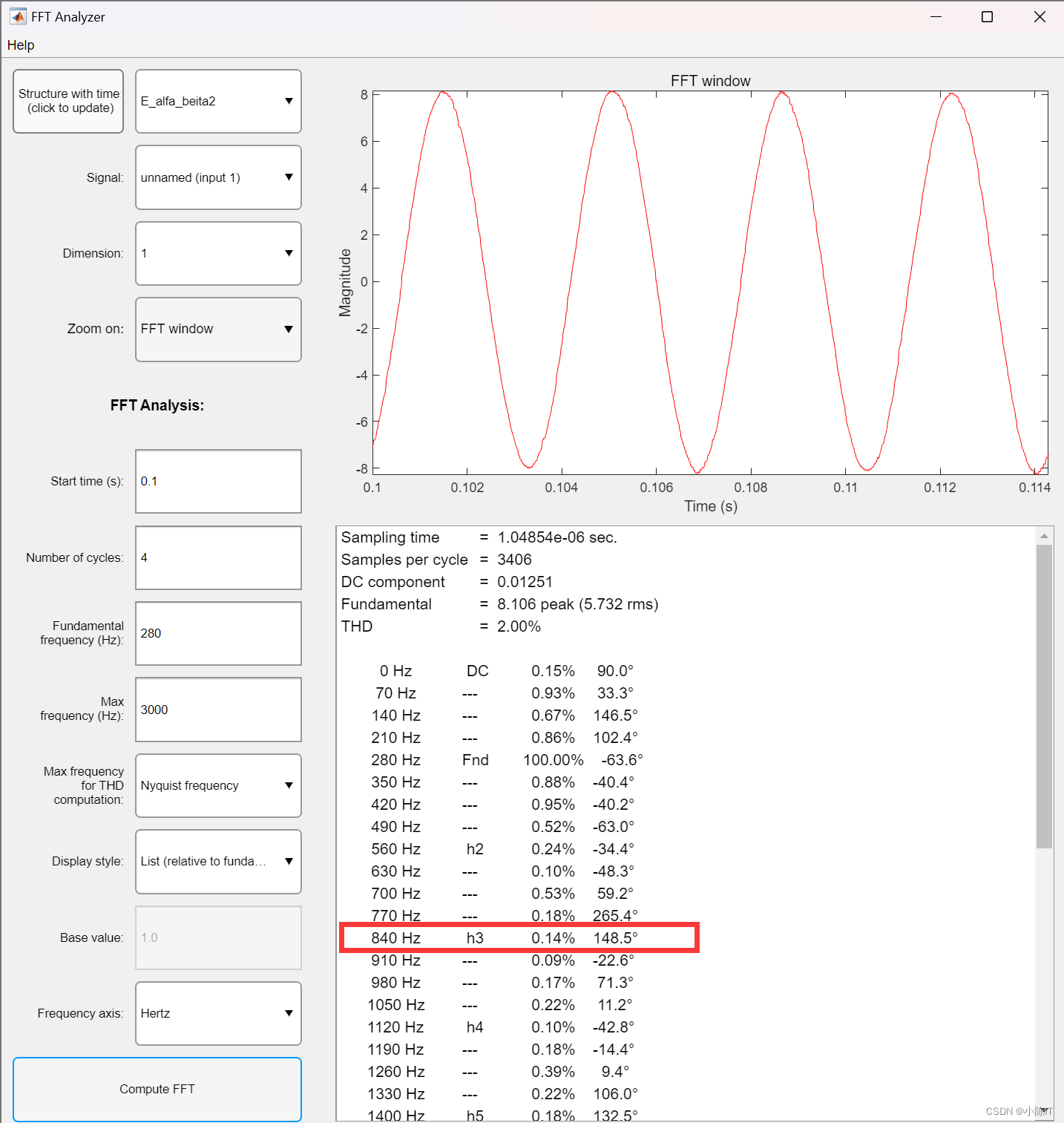
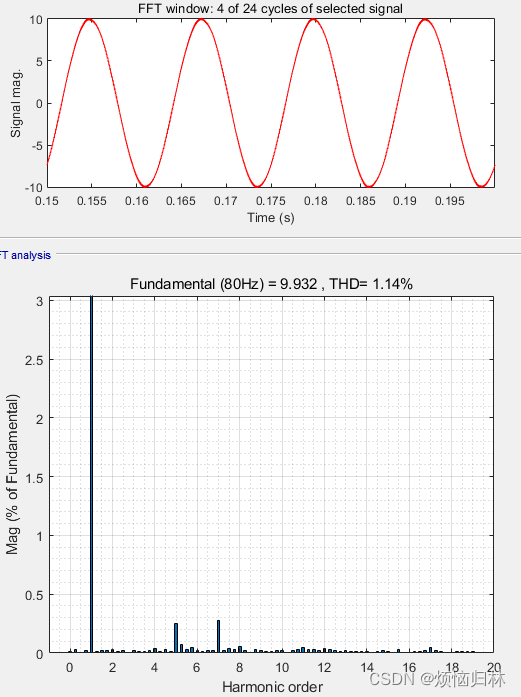
基于RLS的永磁同步电机谐波抑制--FFT分析
基于RLS的永磁同步电机谐波抑制–FFT分析 我今天要做的事情是在永磁同步电机的无感控制中进行谐波抑制,众所周知,无感控制的滑膜观测器中,观测的是反电动势,反电动势的纯净与否,对位置精度和速度精度都有影响,由于三相逆变器的原因, 6 k ± 1 6k\pm1 6k±1次谐波影响最大,所以本次实验目的就是消除这些谐波。今天的主要讲讲RLS的原理,然后会给三个对比: 1、使用低通滤波器的反电动势

电机控制杂谈——永磁同步电机中的永磁体谐波反电势
1.问题的引出 在我的谐波抑制专题中,讲了三种谐波抑制的策略。当时是通过增大逆变器死区来产生较大的谐波。但是在实际电机里面,我感觉死区的影响基本上没有。。。课题组的驱动器中,逆变器的非线性其实基本可以忽略不计了。 但是,目前研究的最多的就是永磁同步电机PMSM了,永磁同步电机的反电势不太可能是非常理想的正弦波,多多少少都会有谐波的。以我用的电机为例子,测出的反电势里面只有1%的五次谐波,但是实
PMSM 永磁同步电机滑膜控制 SVPWM矢量控制 matlab simulink 仿真
仿真搭建平台: (1)该模型采用matlab/simulink 2016b版本搭建,使用matlab 2016b及以上版本打开最佳; (2)该模型已经提前转换了各个常用版本(最低为matlab2012b),防止出现提示版本过高的情况。 模型截图: 算法介绍: (1)仿真模型由直流源、三相逆变桥、永磁同步电机(PMSM)、转速外环滑膜控制器、电流内环PI控制器、Park变换模块、Clark变
![永磁同步电机绝对位置的调零_[转载]](https://img-blog.csdnimg.cn/20201020173306997.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L2RibDI0MDkwNjU1MQ==,size_16,color_FFFFFF,t_70#pic_center)
永磁同步电机绝对位置的调零_[转载]
文章转载自:https://blog.csdn.net/weixin_42164589/article/details/91356478 通常情况下编码器与转子同轴连接后,由于其安装的任意性,绝对位置信号、参考信号与转子位置的初始关系是随机且未知的,即正弦形绝对位置信号与转子机械角度之间存在一个初相角。因此,在编码器安装完成后,必须进行校正方可使用。 编码器安装存在随机性,故正弦形的绝对位置信

二、永磁同步电机矢量控制(FOC)—不同坐标系下电机数学模型
1.电机数学模型 对于永磁同步电机,矢量控制算法是建立在电机的数学模型上,在不同坐标系下,电机数学模型也不同,主要分为自然坐标系ABC下的PMSM数学模型、两相静止坐标系aβ下的PMSM数学模型和两相旋转坐标系dq下的PMSM数学模型。 矢量控制中是进行磁场定向控制,包括转子磁场定向、定子磁场定向和气隙磁场定向。矢量控制基于转子磁场控制,直接转矩控制基于定子磁场定向

永磁同步电机(二)——SVPWM(续)算法实现
1.参考电压矢量的扇区判断 根据前面的分析可以知道,八个电压矢量组成了正六边形,分成六块区域,首先需要做的就是对其进行判断是在哪个扇区了,根据分析可知,可以得出三个关键参考电压量Uref1、Uref2和Uref3,设为ABC,然后根据8421编码的方法,N=4C+2B+A,得出其在的N的区域,注意此处判断的虽然说是扇区,但是计算的是N值,最后在2中一一对应的也是N值。 2.非零矢量和零
永磁同步电机学习(二)——svpwm
简略版本 很多资料网上都有 我就只总结我不很懂的 概念上的一些东西。 抛弃原有的spwm算法,采用逆变器空间电压矢量的切换以获得准圆形旋转磁场从而在不高的开关频率条件下,使得交流电机获得较spwm算法更好的控制性能。 1.为什么要是用SVPWM?为什么不用SPWM? svpwm与spwm相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很
永磁同步电机矢量控制基础补充(八)——Matlab/Simulink打开仿真出现的问题汇总
基础补充类系列文章链接: 永磁同步电机矢量控制到无速度传感器控制学习教程(PMSM) 永磁同步电机矢量控制基础补充(一)——如何绘制电机输出的磁链 永磁同步电机矢量控制基础补充(二)——Matlab自带坐标系和书本自然坐标系之间的关系 永磁同步电机矢量控制基础补充(三)——如何深入的理解调制度m 永磁同步电机矢量控制基础补充(四)——如何设定电流环PI调节器和转速环PI调节器的限幅值
永磁同步电机矢量控制基础补充(九)——Simulink软件的入门学习
注: 1:此为永磁同步控制系列文章之一,应大家的要求,关于永磁同步矢量控制的系列文章已经在主页置顶,大家可以直接去主页里面查阅,希望能给大家带来帮助,谢谢。 2:矢量控制的六篇文章后。弱磁、MTPA、位置控制系列讲解已经补充,也放在主页了,请大家查阅。 3: 恰饭一下,也做了一套较为详细教程放在置顶了,内含基本双闭环、MTPA、弱磁、三闭环、模糊PI等基本控制优化策略,也将滑模,MRAS等无速度

永磁同步电机矢量控制基础补充(五)——什么是低通滤波器?
注:1:此为永磁同步控制系列文章之一,应大家的要求,关于永磁同步矢量控制的系列文章已经在主页置顶,大家可以直接去主页里面查阅,希望能给大家带来帮助,谢谢。 2:矢量控制的六篇文章后。弱磁、MTPA、位置控制系列讲解已经补充,也放在主页了,请大家查阅。 3: 恰饭一下,也做了一套较为详细教程放在置顶了,内含基本双闭环、MTPA、弱磁、三闭环、模糊PI等基本控制优化策略,也将滑模,MRAS等无速度控

永磁同步电机矢量控制基础补充(三)——如何理解调制度m
今天在重新进行基础复习时,发现对于调制度的理解只是基于一个公式,只理解到 m 是一个比值,它具体代表什么物理含义?在控制系统运行过程中 m 又与那些物理量有关呢?调制度 m 会跟随什么变化呢? 我们首先看一下SVPWM中调制度的由来。(图片出自袁雷书籍第二章) 再看一篇论文中对于调制度的定义。(来源于知乎https://www.zhihu.com/question/20904325)

永磁同步电机矢量控制基础补充(二)——Matlab自带坐标系和书本自然坐标系之间的关系
最近可能临近毕业,做毕业设计的同学多了,经常会有同学问我为什么在搭建仿真过程中,按照书本给出的变换矩阵无法实现正常变换?这篇文章就细致的讲一下原因。 在刚开始使用matlab对电机进行建模的过程中,比较容易忽略一个问题。Matlab自身使用的坐标系和书本所介绍的自然坐标系之间并不相同,实际上两者之间相差90电角度。 Matlab自身使用的坐标系如下左图图所示,而书本介绍的自然坐标系如右图所示
永磁同步电机矢量控制基础补充(一)——如何绘制电机输出的磁链
在仿真过程中,电机的磁链输出是一个重要的参考指标,在电机运转过程中,磁链的变化过程能够更直观的表现电机的运行状态。因此,如果能够在matlab里面绘画出磁链的运行轨迹,对于电机模型的运行状态就有了更加直观的观察方式。 1、磁链轨迹自身的意义 SVPWM调制方式的根本目标就在于控制磁链轨迹更加接近圆形,从而控制电机运行更加平稳。因为磁链轨迹和空间电压矢量是垂直关系,其实现的方式即控制空间

王春华将出席去稀土超高效助磁同步电机演讲
演讲嘉宾:王春华 北区销售总监 浙江海川电气科技有限公司 演讲题目:去稀土超高效助磁同步电机-助力客户低碳节能减排工作 会议简介 “十四五”规划中提出,提高工业、能源领城智能化与信息化融合,明确“低碳经济”新的战略目标,热能产业是能源产业和民生保障的重要组成部分,也是二氧化碳排放量大的行业之一,产业高效、清洁、低碳、灵活、智能化水平转型升级势在必行。
永磁同步电机无感FOC(龙伯格观测器)算法技术总结-实战篇
文章目录 1、ST龙伯格算法分析(定点数)1.1 符号说明1.2 最大感应电动势计算1.3 系数计算1.4 龙伯格观测器计算1.5 锁相环计算1.6 观测器增益计算1.7 锁相环PI计算(ST)1.8 平均速度的用意 2、启动策略2.1 V/F压频比控制2.2 I/F压频比控制 3、算法开发3.1 Luenberger核心算法模块3.1.1 Luenberger.h3.1.2 Luenber
永磁同步电机高频注入位置观测
文章目录 1、前言2、旋转高频注入法2.1 旋转高频注入法原理分析2.2 旋转高频注入法仿真 3、脉振高频正弦注入法3.1 脉振高频正弦注入法原理分析3.2 脉振高频正弦注入法仿真 4、脉振高频方波注入法4.1 脉振高频方波注入法原理分析4.2 脉振高频方波注入法仿真 参考 写在前面:本人能力、时间、技术有限,没有对一些细节进行深入研究和分析,也难免有不足和错误之处,欢迎交流和指正