本文主要是介绍永磁同步电机谐波抑制算法(4)——多同步旋转坐标系谐波电流抑制存在的问题以及改进办法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1.问题的引出
在之前的内容中以及讲了多同步旋转坐标系的五七次谐波电流的抑制。
永磁同步电机谐波抑制算法(1)——基于多同步旋转坐标系的五七次谐波电流抑制 - 知乎这段时间发现电机里面会存在五次谐波,然后学了学谐波抑制的方法。一般比较常用的是多同步旋转坐标系和PIR调节器。今天先讲一下多同步旋转坐标系。 Pony:永磁同步电机-谐波抑制这篇知乎下面有很多人在问问题,所…![]() https://zhuanlan.zhihu.com/p/673773182
https://zhuanlan.zhihu.com/p/673773182
虽然这个方法最终是能够实现了五七次谐波电流的完全抑制(最终的效果是非常好的),但是这个过程还存在一定问题的。
为五七次谐波电流的抑制,我们要建立五次、七次同步旋转坐标系,因为在五次、七次同步旋转坐标系下,五七次谐波电流分别都为直流。这样一来,我们就可以直接用PI调节器进行谐波电流的控制了。
但是!因为电流里面包含基波、五次、七次电流分量,所以在同步旋转坐标系下,电流不可能都是直流的,所以我们要进行低通滤波,把五七次谐波的直流分量提取出来。
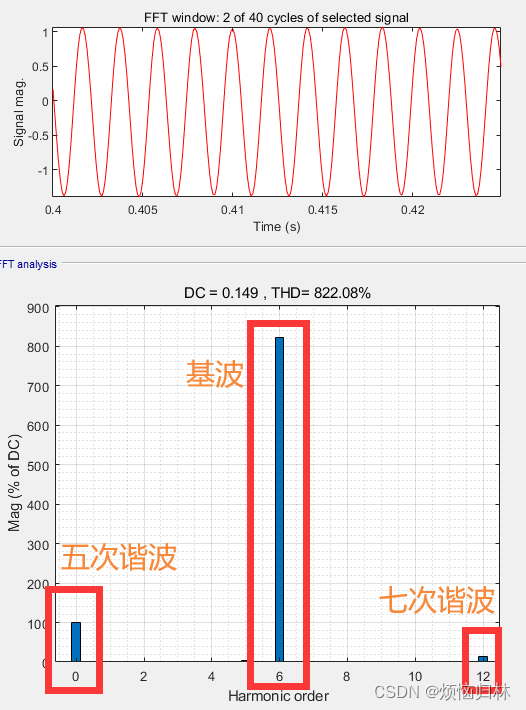
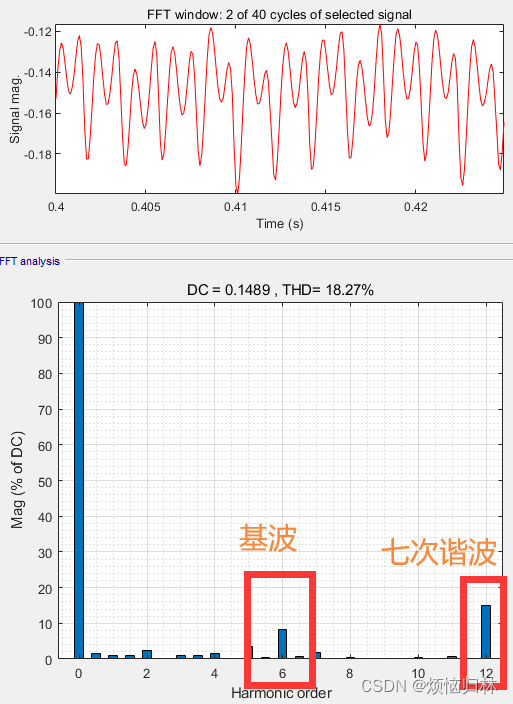
下图为我仿真中,在五次同步旋转坐标系下,对id5的FFT分析的结果。在五次同步旋转坐标系下,直流分量就是五次谐波、六次分量就是基波电流、十二次分量就是七次谐波。(需要解释的话就看下面这篇知乎)
永磁同步电机中3的倍数次谐波为什么不存在? - 知乎写这个回答,还想顺便回答一下其他几个相关的问题。1.永磁同步电机中3的倍数次谐波为什么不存在?2.在静止…![]() https://www.zhihu.com/question/362376425/answer/3372378100
https://www.zhihu.com/question/362376425/answer/3372378100
可以看到,尽管我加了低通滤波器,但是提取得到的id5中的交流量幅值还是太大了,直流分量反而太小了,这当然就会影响谐波的抑制效果。
下面这是一篇论文中给出的iq5的波形,同样地,即使有低通滤波,iq5还是会有交流分量。

参考文献:
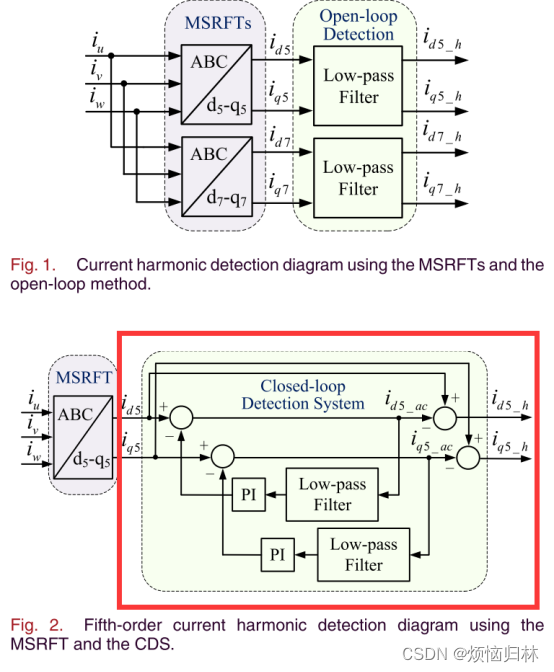
这篇文章为了提取五次同步旋转下的直流分量,给原来的低通滤波器加上了一个反馈闭环PI控制,其结构如下图所示:
文章最终的效果是挺好的,但是我个人感觉不是很方便,而且需要对PI以及低通滤波器进行调参。
那现在我的想法是,有没有什么比较简单的方式能够比较干净的提取谐波电流呢?
2.简单提取谐波电流的精确办法
参考文献:
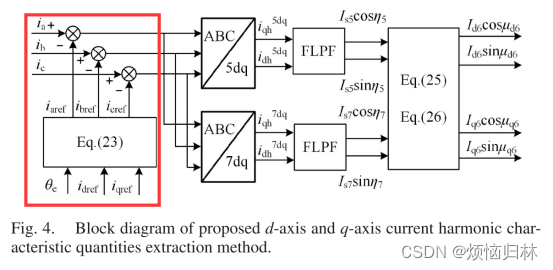
文中的办法:
文章先通过d-q电流参考值,计算出abc三相电流的基波分量。
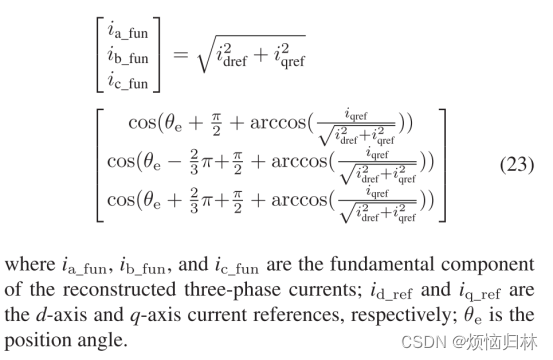
然后通过将实际的三相电流与三相电流的基波分量相减,就可以得到谐波电流的数值了。之后再经过低通滤波器,就可以得到比较干净的直流。
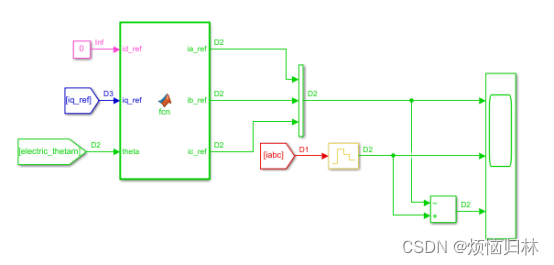
根据文章公式,搭建好相应的模块
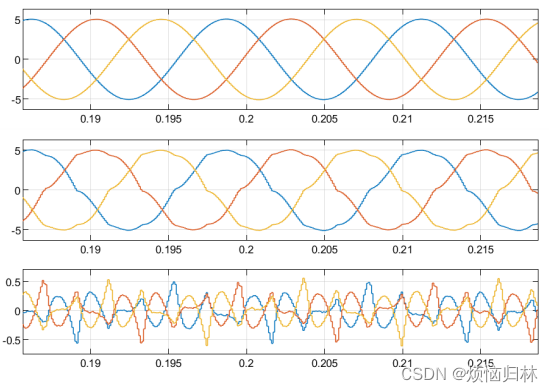
上图代表期望的三相电流,中间代表实际的三相电流,下图代表提取得到相电流谐波
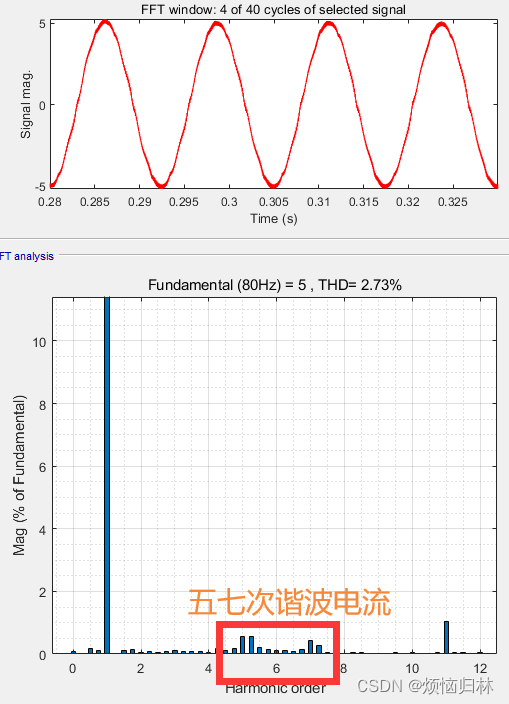
从下图中可以看到,通过上述办法,我们有效滤除了基波电流在五次同步旋转坐标系下的绝大部分。
3.仿真对比
仿真参数:
Tpwm = 1e-4;%开关周期
Tspeed = 5e-4;%转速采样周期,在实际DSP系统中,Tspeed会小于Tpwm
Pn = 4;%电机极对数
Ls = 8.5e-3;%定子电感,采用隐极的,Ld=Lq=Ls
Rs = 3;%定子电阻
flux = 0.1688;%永磁体磁链
Vdc = 311;%直流母线电压
iqmax = 30;%额定电流
fc = 125;
%这是5-7同步旋转坐标系下低通滤波器的带宽以及基波同步旋转坐标系下PI调节器的带宽,单位为Hz
%5-7同步旋转坐标系下PI调节器的带宽设置为0.8fc
Tdead = 7.5e-6;%死区时间
time_trans = 0.25;
%谐波抑制开始的时间


这里对比看来,好像二者并没有太大区别。如果再回去看看我之前的知乎,发现这个多同步旋转坐标系谐波抑制策略的PI带宽必须很小,不能太大,越大就越容易失去稳定。上文的PI带宽才设置为125Hz,这属于非常低的带宽了。
永磁同步电机谐波抑制算法(1)——基于多同步旋转坐标系的五七次谐波电流抑制 - 知乎这段时间发现电机里面会存在五次谐波,然后学了学谐波抑制的方法。一般比较常用的是多同步旋转坐标系和PIR调节器。今天先讲一下多同步旋转坐标系。 Pony:永磁同步电机-谐波抑制这篇知乎下面有很多人在问问题,所…![]() https://zhuanlan.zhihu.com/p/673773182
https://zhuanlan.zhihu.com/p/673773182
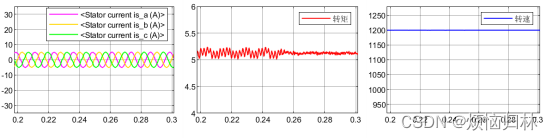
下面我把PI带宽调节到250Hz看看效果:
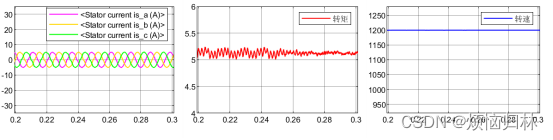
可以看到,采用改进策略,在0.25s开始谐波抑制时,转矩脉动明显减小,说明谐波抑制开始起作用了;而传统的策略在0.25s开始振荡,说明系统有点不太稳定了。
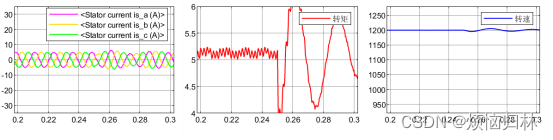
下面我把PI带宽调节到500Hz看看效果:
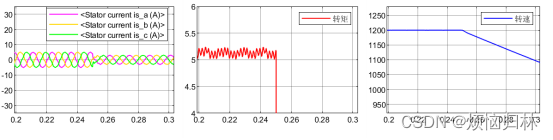
可以看到,采用改进策略的效果还是很好,系统也没有发生不稳定的问题;而传统策略此时转矩立即下跌,导致转速没办法稳定在1200r/min,速度不断下降。
4.仿真分析
为什么多同步旋转坐标系下的PI带宽越大越容易失去稳定呢?
1)低通滤波器的存在会增加系统的延时、减小系统的稳定裕度。
参考文献:

LPFs are usually needed in MSRF-based harmonic control [18], [23], [24]. Note that the delay resulting from LPFs can degrade the dynamic performance as well as the stability margin of the control system.
2)多同步旋转坐标系中,需要多个PI,PI调节器参数设计不当就很容易失去稳定。
3)在传统的方案中,基波同步坐标系下的PI调节器输出实际上会包含一部分五七次谐波分量;同理,在五七同步坐标系下的PI调节器输出实际上会包含一部分基波分量。这就会造成几个PI调节器输出直接的相互冲突。
参考文献:

Because the actual motor current contains harmonics, the output voltage of d-axis and q-axis current controllers will contain a certain amount of harmonics, which is bound to have a further impact on the current harmonics.
怎么验证这个几个PI是相互冲突的呢?
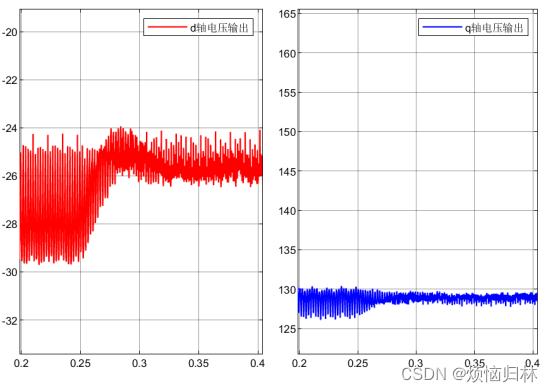
我们可以看到加入五七次同步旋转坐标系后,原来的基波旋转坐标系下的PI的输出是否会变化。(我是在0.25s加入五七次同步旋转坐标系的)
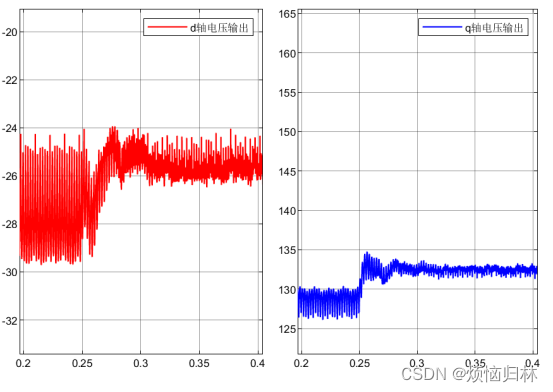
可以看到,在带宽升高之后,基波同步旋转坐标系下d-q电流PI调节器输出有了明显变化。特别是q轴电压,输出变化特别大。
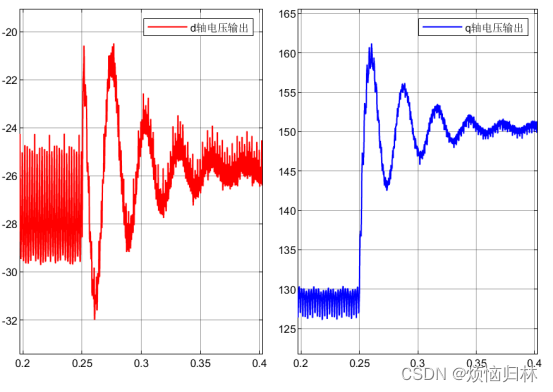
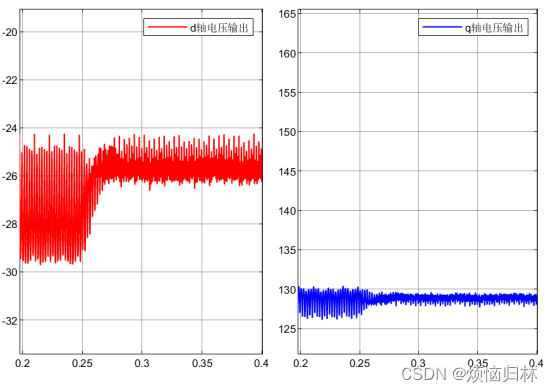
为什么这个新的谐波提取策略可以提高系统的带宽呢?
因为这个策略相当于滤除了五七同步坐标系下的PI调节器输出包含的基波分量,这使得基波电流只受基波同步旋转坐标系下的PI调节器影响,而不是同时受三个同步旋转坐标系下的PI调节器影响,避免了多个PI调节器的输出冲突。因而也就有了更好的控制性能。
从下图可以看到,五七次同步旋转坐标系后,基波同步旋转坐标系下d-q电流PI调节器输出幅值基本没变化,说明这个方法确实避免了多个PI调节器的输出冲突。
这篇关于永磁同步电机谐波抑制算法(4)——多同步旋转坐标系谐波电流抑制存在的问题以及改进办法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









