本文主要是介绍永磁同步电机无感FOC模型参考自适应(MRAS)转速估计算法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 1、前言
- 2、模型参考自适应控制(MRAS)的基本原理分析
- 2.1 模型参考自适应系统的分类
- 2.2 模型参考自适应系统的设计思路
- 2.3 波波夫(PopoV)超稳定性理论
- 3、永磁同步电机无位置模型参考自适应系统模型分析
- 3.1 参考模型与可调模型的确定
- 3.2 参考自适应律的确定
- 3.3 仿真
- 3.3.1 核心模块(在滑膜观测器、龙伯格、非线性磁链观测器基础上修改)
- 3.3.2 仿真效果
- 参考
写在前面:本人能力、时间、技术有限,没有对一些细节进行深入研究和分析,也难免有不足和错误之处,欢迎交流和指正。本人写博客主要是学习过程的记录。
1、前言
模型参考自适应控制方案最初由美国麻省理工学院的教授Whitaker 在1958年研究飞机自动驾驶仪时所提出来的,其方案采用了局部参数优化理论来设计自适应律。1989 年,C.Schauder 首次在电机转速辨识中实现了模型参考自适应控制方法。随着自动控制技术的进步,自适应控制逐渐发展成了一个新的分支,且在电机控制领域取得了较为广泛的应用。
2、模型参考自适应控制(MRAS)的基本原理分析

2.1 模型参考自适应系统的分类

2.2 模型参考自适应系统的设计思路


2.3 波波夫(PopoV)超稳定性理论

则整个系统即为(渐进)超稳定的,反之亦然。
3、永磁同步电机无位置模型参考自适应系统模型分析
3.1 参考模型与可调模型的确定

3.2 参考自适应律的确定


3.3 仿真
3.3.1 核心模块(在滑膜观测器、龙伯格、非线性磁链观测器基础上修改)
模型下载地址:永磁同步电机无感FOC模型参考自适应(MRAS)转速估计算法simulink仿真模型

其中MRAS模块:
 可调模块:
可调模块:


function vo = filter_LPF1(vi, wcTs)
% filter_function: 一阶低通滤波器函数
% 输入参数:
% vi: 输入信号
% wcTs: 截止频率乘以采样周期
% 输出参数:
% vo: 滤波后的输出信号,单精度浮点数persistent vo_k_1% 验证是否是第一次调用函数,如果是,则初始化 vo_k_1
if isempty(vo_k_1)vo_k_1 = single(0);
end% 计算滤波系数
A = wcTs / (1 + wcTs);% 计算输出信号
vo = A * vi + (1 - A) * vo_k_1;% 更新 vo_k_1 以供下一次调用使用
vo_k_1 = vo;% 将输出信号转换为单精度浮点数
vo = single(vo);end
MRAS模块封装,及模块参数设置:
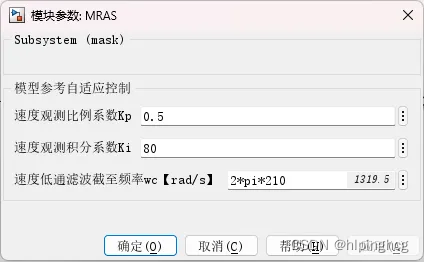
系统及电机参数:
Ts=0.0001;
Pn=4;
Rs=0.055;
Ls=0.21e-3;
flux=0.007797;
J=0.053e-4;
B=0;
fx=0;
Udc=24;
CurrKp=0.34558;
CurrKi=90.5078;
spd_kp=0.018643;
spd_ki=03.0679;
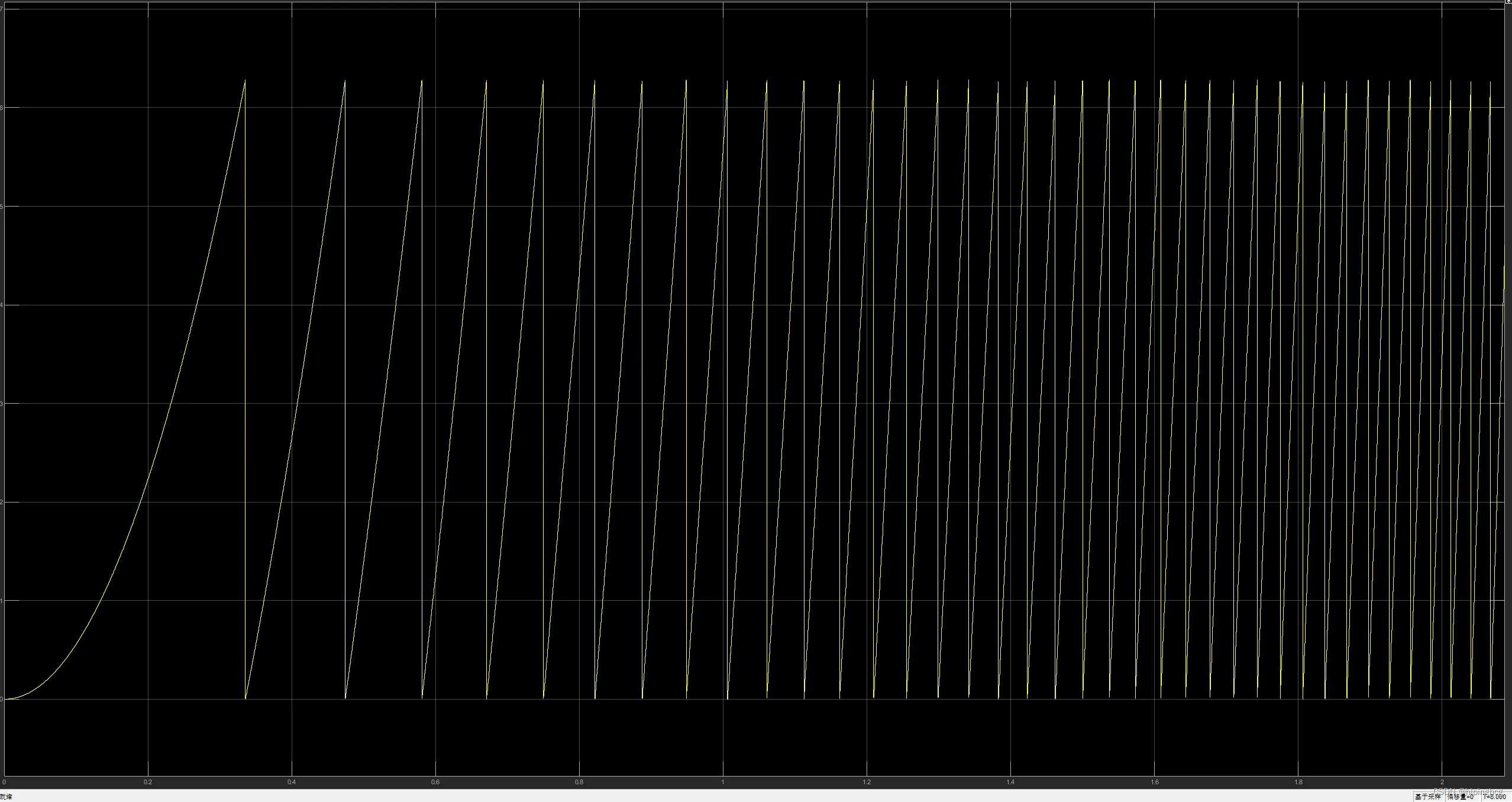
3.3.2 仿真效果
速度波形(参考速度,观测速度,电机反馈速度)

角度波形
参考
【1】刘建锋. 非线性伺服系统的参数辨识与自适应滑膜控制[D].青岛理工大学,2022.DOI:10.27263/d.cnki.gqudc.2020.000169.
【2】马英华. 永磁同步电机无速度传感器控制方法的研究[D].山东大学,2012.
【3】朱瑞杰. 基于模型参考自适应的永磁同步电机无位置传感器控制[D].北京交通大学,2018.
【4】李向伟. 基于模型参考自适应的PMSM控制方法研究[D].天津大学,2014.
【5】钟臻峰. 永磁同步电动机全转速范围基于模型参考自适应的无传感器控制[D].浙江大学,2017.
【6】现代永磁同步电机控制原理及MATLAB仿真 袁雷
这篇关于永磁同步电机无感FOC模型参考自适应(MRAS)转速估计算法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






