转速专题

基于PI控制算法的异步感应电机转速控制系统simulink建模与仿真
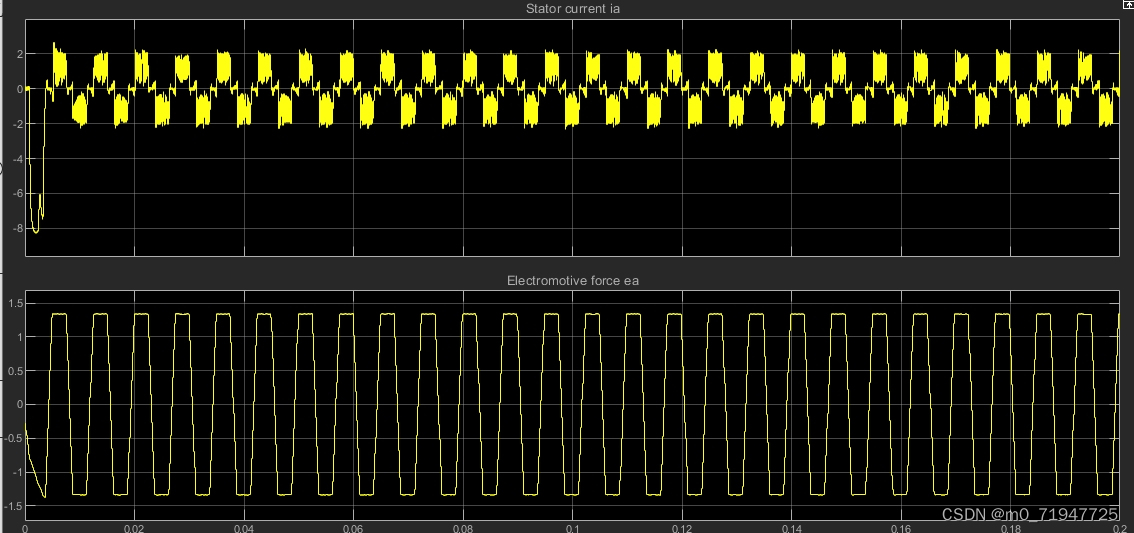
目录 1.课题概述 2.系统仿真结果 3.核心程序与模型 4.系统原理简介 5.完整工程文件 1.课题概述 基于PI控制算法的异步感应电机转速控制系统simulink建模与仿真。PI控制器是一种经典的线性控制器,它通过将控制量的比例部分和积分部分相结合来实现对系统输出的调节。比例部分用于快速响应偏差,而积分部分则用于消除稳态误差。 2.系统仿真结果 (完整程

Dell服务器使用ipmi控制风扇转速
#关闭自动调速ipmitool -I lanplus -U root -P XXX -H 192.168.3.30 raw 0x30 0x30 0x01 0x00 ipmitool -I lanplus -U root -P XXX -H 192.168.3.30 raw 0x30 0x30 0x02 0xff 0x23#80%转速ipmitool -I lanplus -U root -P
汇川AM400PLC编码器转速测量功能块(M法测速)
M法测速的原理和相关代码,大家可以参考相关专栏文章,常用链接如下: 1、编码器M法测速仿真 编码器M法测速仿真(Simulink)_mt法测速 simulink-CSDN博客文章浏览阅读2k次。编码器M法和T法测速的详细讲解可以参看下面的文章链接,这里不再赘述,这里主要介绍Simulink里建模仿真,带大家从另一个角度理解编码器测速原理。PLC通过编码器反馈值计算速度的推荐做法(算法解析+ST

【论文推导】基于有功阻尼的转速环PI参数整定分析
前言 在学习电机控制的路上,PMSM的PI电流控制是不可避免的算法之一,其核心在于内环电流环、外环转速环的设置,来保证转速可调且稳定,并且保证较好的动态性能。整个算法仿真在《现代永磁同步电机控制原理及matlab仿真》中已详细给出,但针对转速环中的“有功阻尼”推导转速话PI参数的过程,描述得较为模糊,理解起来比较困难,故本文将基于现有资料给出“基于有功阻尼转速环PI参数整定”的分析。 理论
【电机参数】直流无刷电机机械转速、ud、uq、us、输出功率、相反电动势幅值、载波周期、转矩常数
【电机参数】直流无刷电机机械转速、ud、uq、us、输出功率、相反电动势幅值、载波周期、转矩常数 前言 【电机控制】直流有刷电机、无刷电机汇总——持续更新 使用工具: 1.示波器:PICO2205A 2.电桥LCR:VICIOR4090A 3.电流钳:汉泰CC65 4.直流稳压电源:GPS305D(30V/5A) 5.上位机:VOFA+ 提示:以下是本篇文章正文内容,下面案例
永磁同步电机无感FOC模型参考自适应(MRAS)转速估计算法
文章目录 1、前言2、模型参考自适应控制(MRAS)的基本原理分析2.1 模型参考自适应系统的分类2.2 模型参考自适应系统的设计思路2.3 波波夫(PopoV)超稳定性理论 3、永磁同步电机无位置模型参考自适应系统模型分析3.1 参考模型与可调模型的确定3.2 参考自适应律的确定3.3 仿真3.3.1 核心模块(在滑膜观测器、龙伯格、非线性磁链观测器基础上修改)3.3.2 仿真效果 参考

功率、转矩、转速关系推导
电动机的功率与转矩 电动机的功率,应根据生产机械所需要的功率来选择,尽量使电动机在额定负载下运行。选择时应注意以下两点: ① 如果电动机功率选得过小.就会出现“小马拉大车”现象,造成电动机长期过载.使其绝缘因发热而损坏.甚至电动机被烧毁。 ② 如果电动机功率选得过大.就会出现“大马拉小车”现象.其输出机械功率不能得到充分利用,功率因数和效率都不高,不但对用户和电网不利。而且还会造成电能浪费。

4路5v差分编码器脉冲计数器转rs485 232转速测量Modbus RTU远程I/O模块
IBF67产品实现传感器和主机之间的信号采集,用来解码编码器信号。IBF67系列产品可应用在 RS-232/485总线工业自动化控制系统,自动化机床,工业机器人,三坐标定位系统,位移测量,行程测量,角度测量,转速测量,流量测量,产品计数等等。 产品包括信号隔离,脉冲信号捕捉,信号转换和RS-485串行通信。每个串口最多可接255只 IBF67系列模块,通讯方式采用ASCII码通讯协议或MODBUS
基于单片机的光电传感转速测量系统的设计
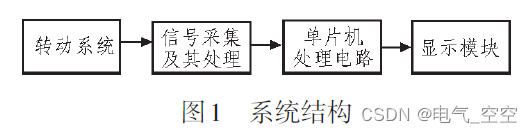
摘要:针对在工程实践中很多场合都需要对转速这一参数进行精准测量的目的,采用以STC89C52 芯片为核心,结合转动系统、光电传感器、显示模块等构成光电传感器转速测量系统,实现对电机 转速的测量。通过测试表明该系统具有结构简单、所耗成本低,测量精度高、稳定可靠等优点,具 有广阔的应用前景。 关键词:转速;测速系统;STC89C52芯片;槽型光电传感器 在工程实践中,很多场合都需要对转速这一参数进行
Proteus仿真--温度控制的直流电机转速设计
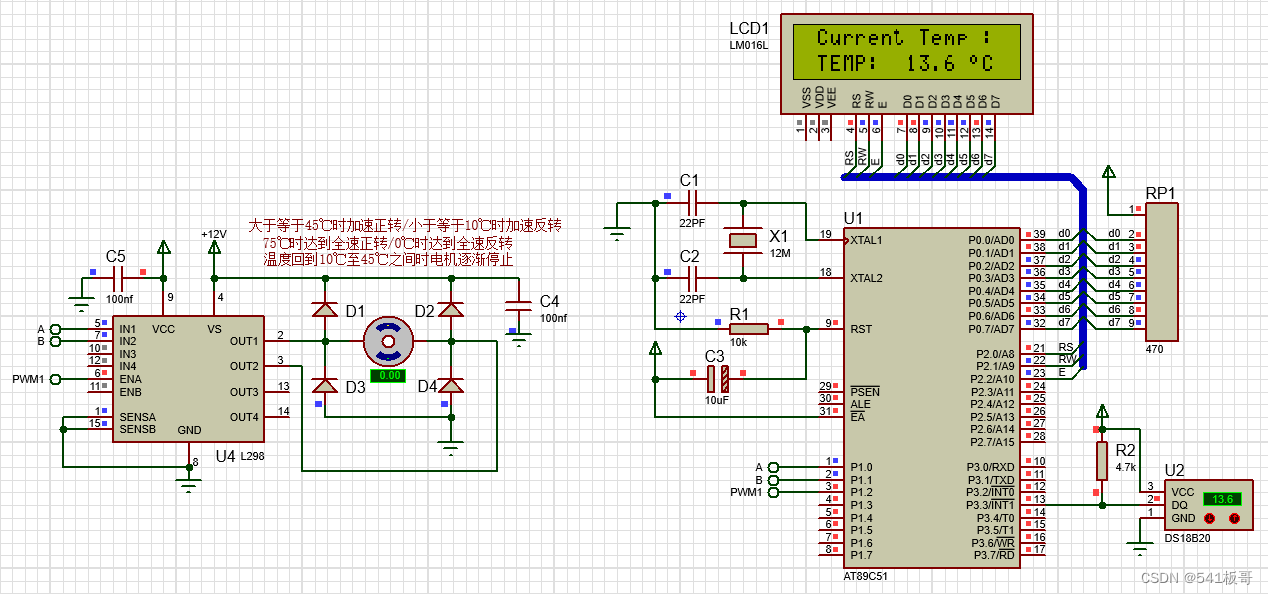
本文介绍温控直流电机设计(完整仿真源文件及代码见文末链接) 电机控制选用L298N控制芯片,温度采集芯片选用DS18B20温控芯片,温度显示是LCD1602液晶显示器,程序逻辑见图中所述 仿真图如下 仿真运行视频 Proteus仿真--温度控制的直流电机转速设计 附完整Proteus仿真资料+代码资料 链接:https://pan.baidu.com/s/1L-oF
不装软件查看Mac的CPU温度、风扇转速等信息
打开命令终端输入: sudo powermetrics ... --samplers smc # 如果显示 Password,就输入Mac 的开机密码,输入的时候密码不会显示出来,输入完回车就OK了。

bently 3500/50 转速模块:型号3500/50-01-00-01(前面板288062-02,后背板133442-01) 3500/53 超速检测模块 3500/01-01组态软件
3500/50出厂时是未组态的。需要时,将3500/50插入3500框架,并进行组态,使其完成所需的监测功能。这使你能够为多种转速应用备置一块备用模块。 本特利3500/50M Tachometer Module RPM/Min 精度: ± 20 rpm/min 转速表 模块 3500/50-AXX-BXX-CXX 选项描述 A: I/O 模块 类型 0 1 带内部端子的I/O 模块 0
该模型为直流无刷电机的六步换相控制,外环为速度环,内环为电流环,控制效果良好,能跟随给定转速
该模型为直流无刷电机的六步换相控制,外环为速度环,内环为电流环,控制效果良好,能跟随给定转速 ID:9348658564366456Keepmoving
用示波器测量无刷电机的转速
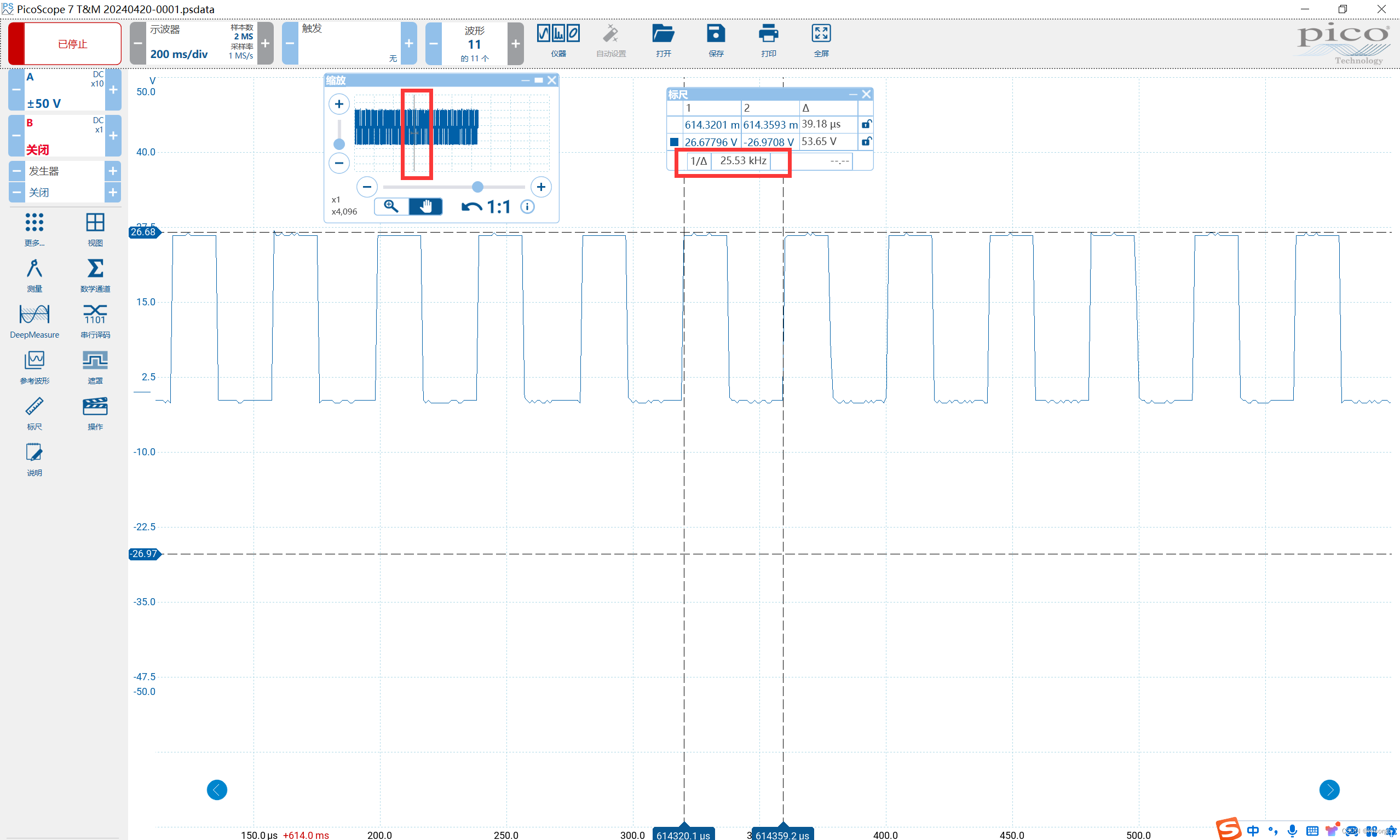
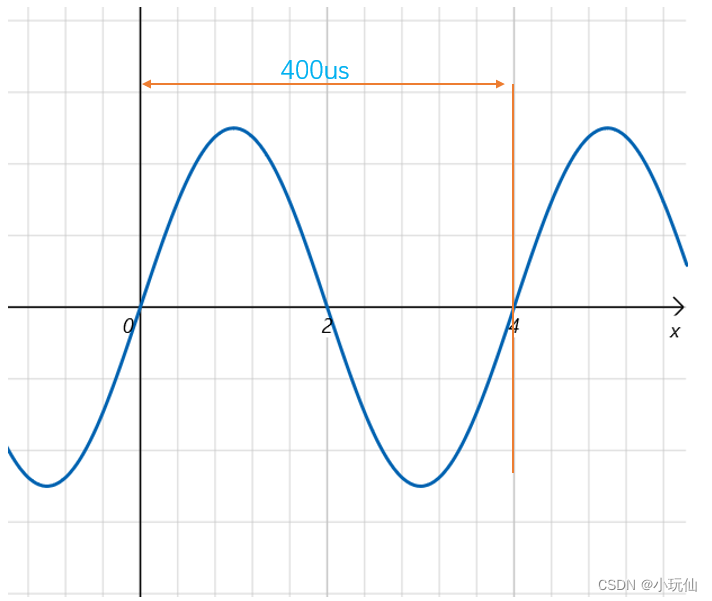
在了解示波器测量无刷电机转速前,我们先来看下无刷电机电频率(电流频率)的计算。 例如电机的转速是100000转/分钟,极对数是2极对。 先将每分钟转速转化为频率即每秒转速 = 100000/60 = 1666.66转/秒 那么电机的电频率就是转速(转/秒)*极对数 = 1666.66*2 = 3333.32 Hz 计算出来的频率就是用示波器电流钳钳中某一相电流的频率。 接下来就通过反推就
基于51单片机下通过蓝牙串口控制LCD1602屏幕显示步进电机正反转以及转速
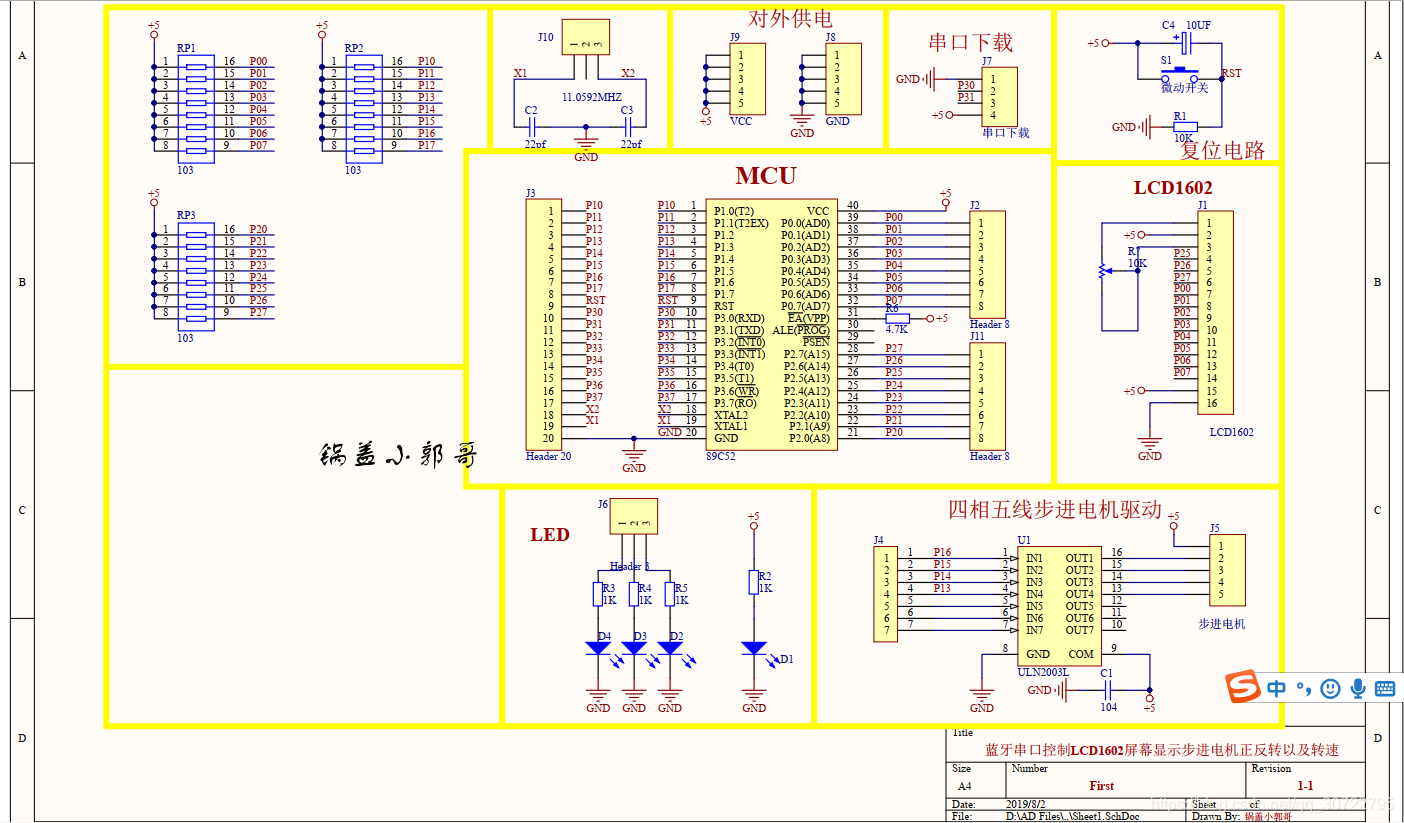
通过蓝牙串口控制LCD1602屏幕显示正反转以及转速 简 述: 通过蓝牙串口发送指定数据到STC89C52RC单片机,控制28BYJ-48步进电机正转或者反转或者速度的快中慢,然后51单片机, 做相应的判断,在LCD1602屏幕上显示正反转状态 以及 转速 演示视频放在了哔哩哔哩上: https://www.bilibili.com/video/av61543899 完整程序的已经放在了

汽车转速传感器采集之电路设计
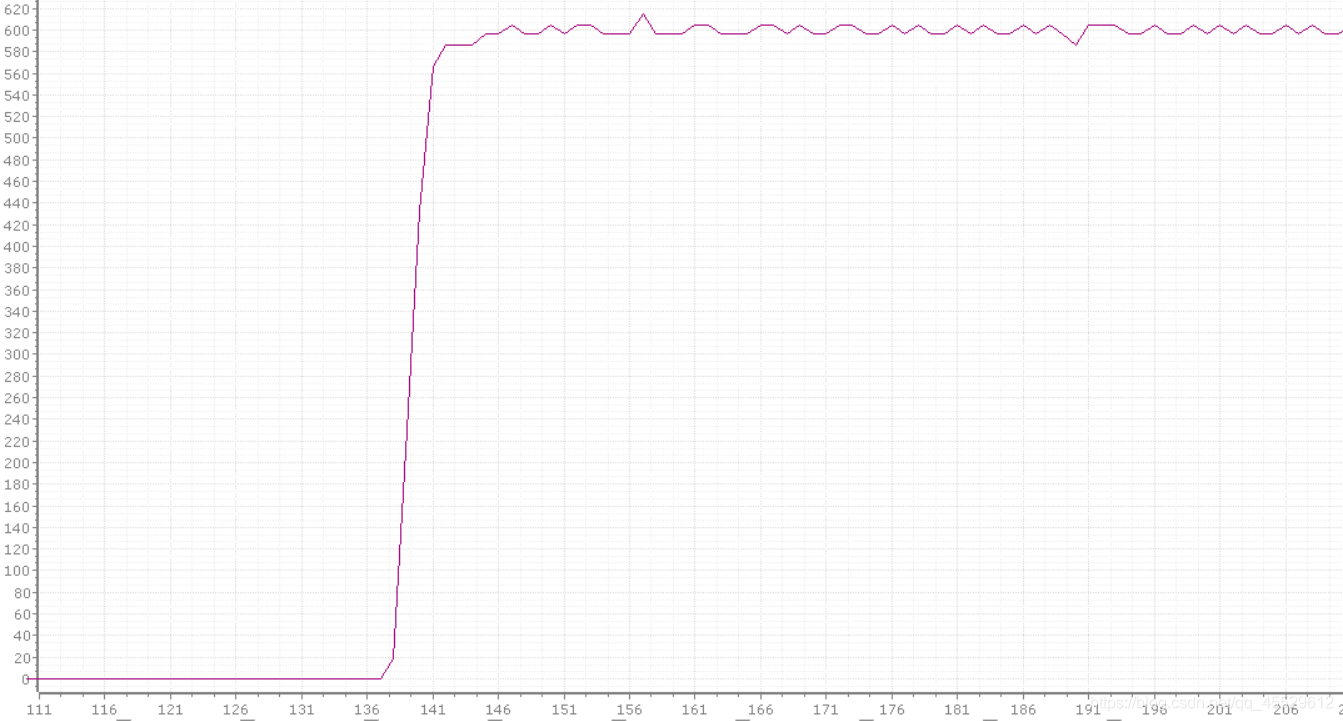
1.汽车转速传感器输出范围 发动机每转动一次,转速传感器就会输出一个高脉冲。汽车正常行驶时转速一般为1000-3500r/min,换算为秒约为15-60r/s,部分车型的转速传感器为100倍输出。由此可以推算出绝大部分汽车的转速传感器输出范围为:0-6000r/s,换算为频率后可得,转速传感器的输出频率为:0-12khz。 2.转速传感器的输出干扰 在正常情况下,转速传感器的输出为正负2.5
PID控制电机转速简单测试
傅里叶变换与不确定性 卓晴 速度采样频率 卓晴 在线拟合工具 新概念:积分限幅。在物理量达到期望值之前防止误差积分越来越大使得没有稳定的反而作用相反了。而有了积分限幅之后在积分误差达到幅值的时候将会保持不变,其目的是让PID控制函数不会输出一个很大的值,这样就能让物理量稳定下来。 从机 uint8_t start_flag = 0;uint8_t finish_flag = 0;
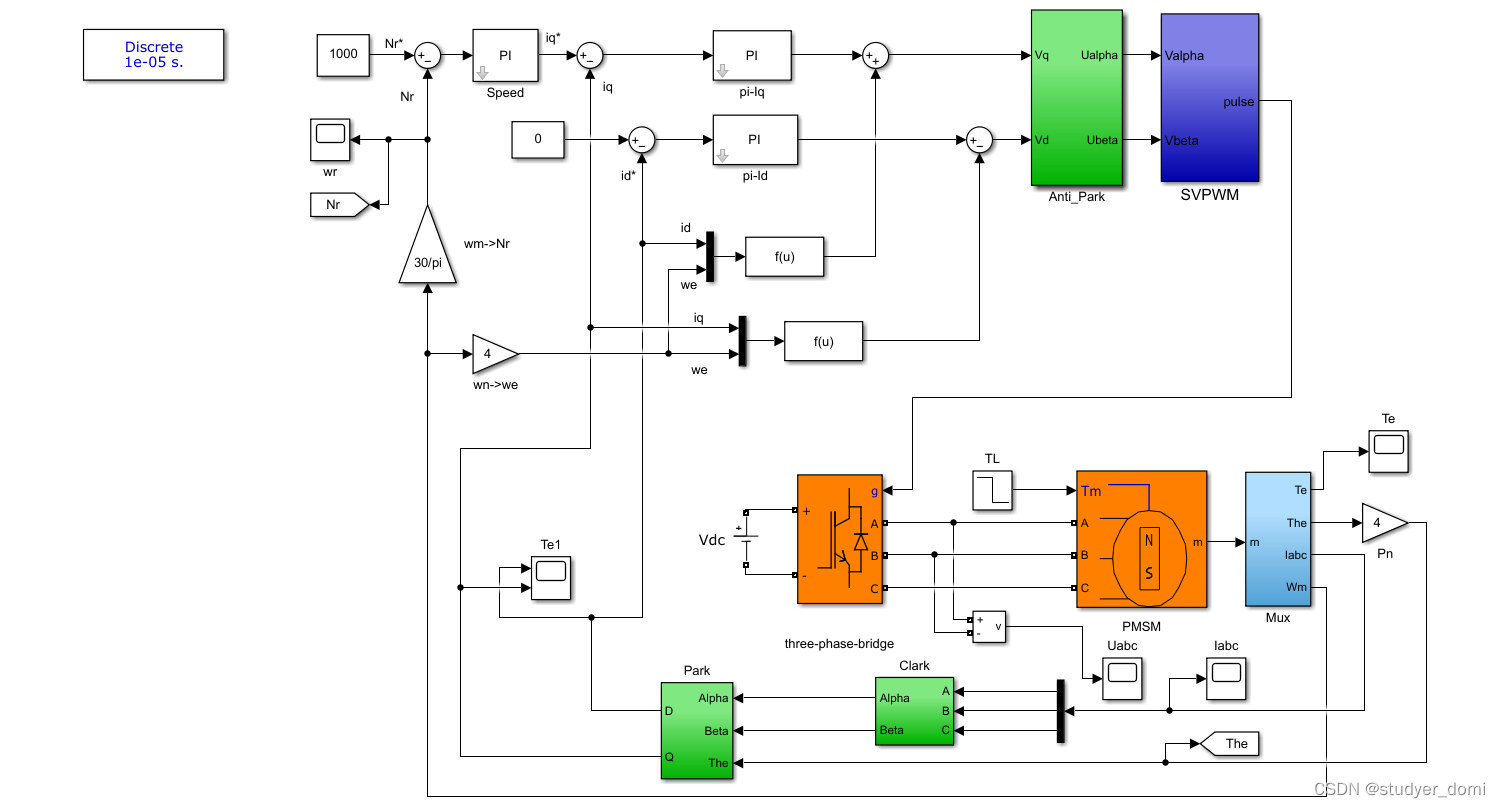
matlab simulink PMSM_SVPWM PI转速控制
1、内容简介 略 8-可以交流、咨询、答疑 2、内容说明 略PMSM_SVPWM PI转速控制 PMSM SVPWM PI转速控制 3、仿真分析 4、参考论文 略
毕业设计 基于51单片机霍尔电机转速测量温度PWM调速设计
基于51单片机霍尔转速测量温度PWM调速设计 1、快速完成毕设的方法2、项目资料2.1 系统框架2.2 系统功能 3、部分电路设计3.1 STC89C52单片机最小系统电路设计3.2 A3144霍尔传感器模块电路设计3.3L298N电机驱动模块电路设计3.4 LCD1602液晶显示电路设计 4、部分代码展示4.1 DS18B20读取温度程序设计4.2 LCD1602显示字符串程序设计4.3

STC51单片机14——利用51单片机测量信号的频率,高低频及转速显示
完整代码及仿真资料打包下载: STC单片机14-利用51单片机测量信号的频率,高低频及转速显示 https://download.csdn.net/download/fengyuzhe13/87325539 主程序: /* 外部12M晶振,系统时钟12分频,T1定时 P3.4为信号输入端 按钮1:按下为高频段(1kHz-10kHz) 抬起为低频段(0Hz-1kHz) 按

用STM32制作汽车蓝牙OBD转速/车速表(带LED转速指示)
这个项目的目标是用STM32F103C8T6制作汽车蓝牙OBD转速/车速表,在OLED屏上显示当前转速和车速,同步在OLED灯带上显示转速(按预设的最高转速的比例显示),转速超出预设的最高转速后,灯带开始闪烁,可以用于换挡提示。 系统结构框图如下: 1、LED灯条和OLED屏用商家提供的驱动就好了; 2、蓝牙模块HC-05预先和蓝牙OBD配对好,HC-05连接模式需要设置CMOD为1,写

ANSYS WORKBENCH 加转速循环对称分析
基础mesh等操作略去 1.选择模型 2.插入模型选择材料等 3.插入圆柱坐标系 4.插入循环对称区域 5.在静力预应力处加转速 6.添加约束 7.求解
启动图短暂黑屏_GL550启动车后仪表上转速不指示,各种故障灯亮起
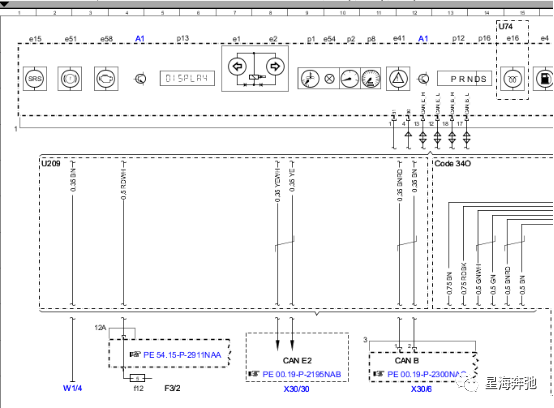
车架号车型发动机和变速箱型号行驶里程4JGDF7DE7DA120825GL550276928和72290967345故障现象(陈述):此车在车库放了3个月,去启动无反应,接到客户救援电话最后直接拿上一个原厂电瓶给客户换上,换上之后车能正常启动,但是发现仪表上全部故障指示灯亮起,水温转速表指示为0,去挂挡发现能挂挡但是档位不显示,换上档之后也能正常行走,但是迈速表不显示,不随着油门的增加迈速增加
keil5(矩阵按键控制电机转速)
简单应用: 按下矩阵按键,切换模式 S2:显示功能,且清零 S5:转速加一 S6:转速减一 S7:转速加四 S8:转速减四 注意:此代码有防伪,谨慎拷贝 代码仍存在一些问题,时间原因已放弃更改!!! 代码如下: main.c #include <REGX52.H>#include "Delay.h"#include "Timer0.h"#include "M