本文主要是介绍【电机参数】直流无刷电机机械转速、ud、uq、us、输出功率、相反电动势幅值、载波周期、转矩常数,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
【电机参数】直流无刷电机机械转速、ud、uq、us、输出功率、相反电动势幅值、载波周期、转矩常数
前言
【电机控制】直流有刷电机、无刷电机汇总——持续更新
使用工具:
1.示波器:PICO2205A
2.电桥LCR:VICIOR4090A
3.电流钳:汉泰CC65
4.直流稳压电源:GPS305D(30V/5A)
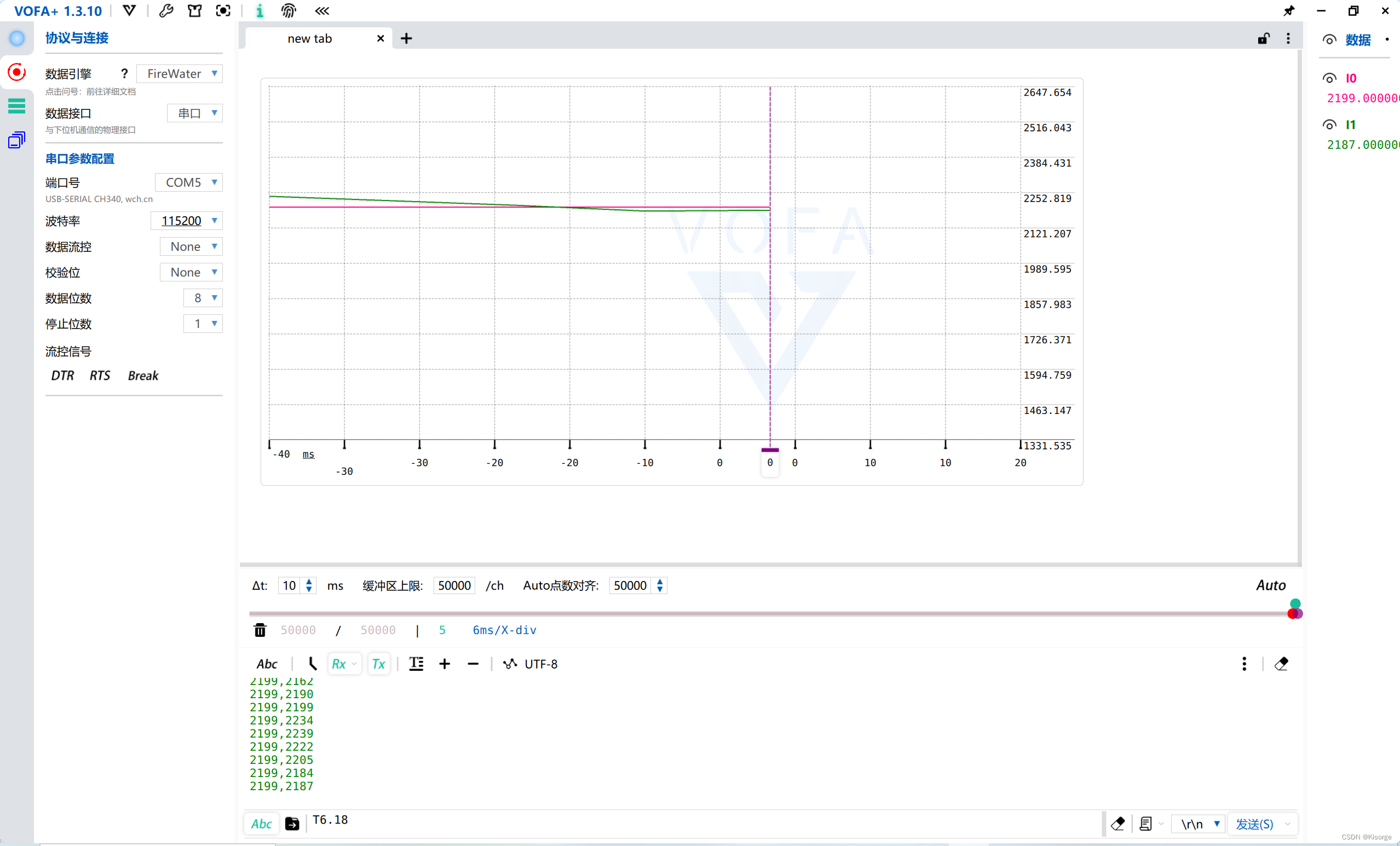
5.上位机:VOFA+
提示:以下是本篇文章正文内容,下面案例可供参考
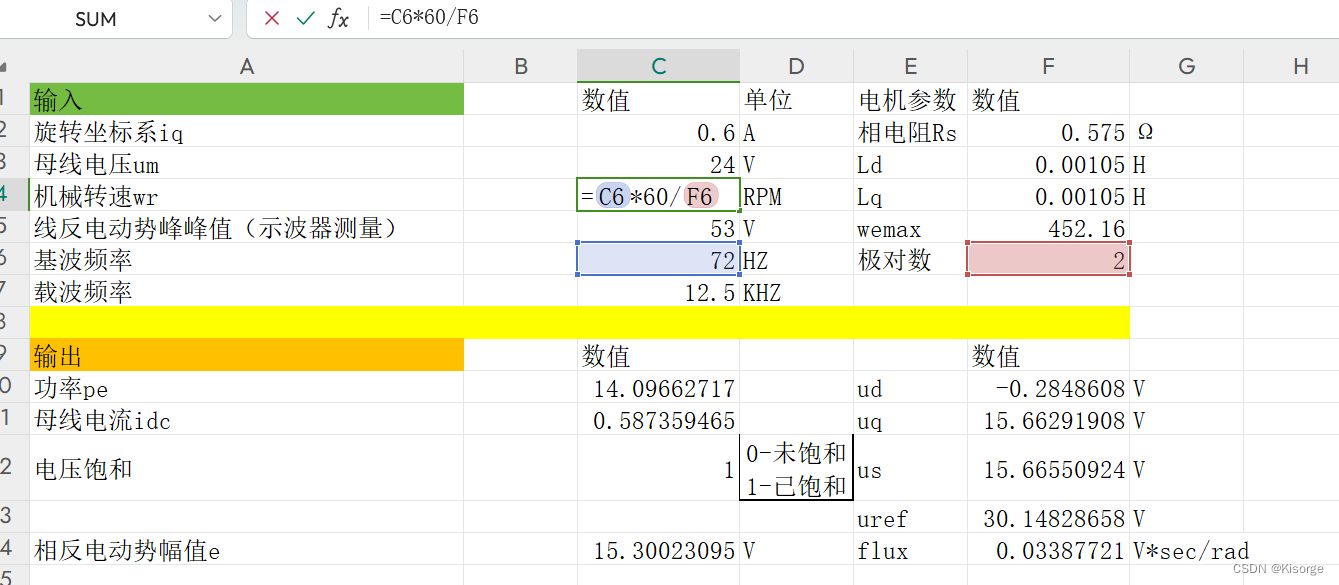
一、机械转速
通过串口打印,设置目标转速2200RPM,观测器实际反馈目标转速2187RPM左右。
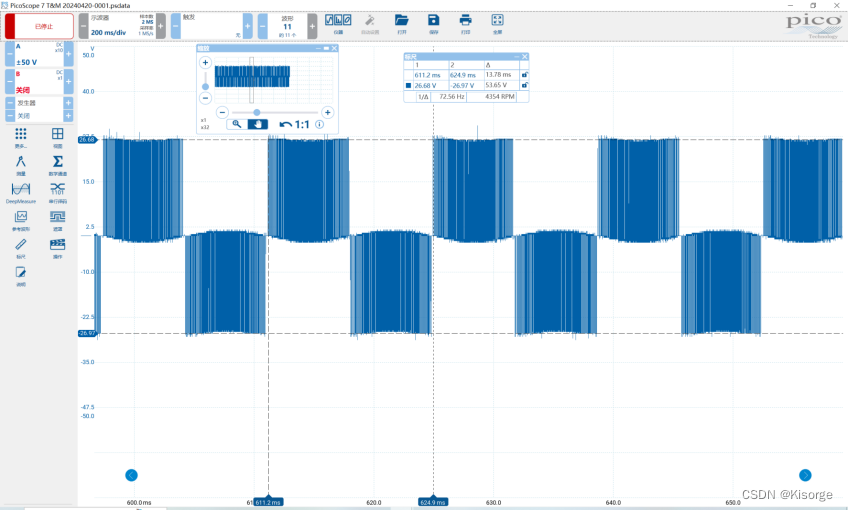
示波器PICO,表笔接两相,看一个电周期的频率,可以直接看出来4354RPM,由于我用的电机是2极对数,所以除以2就得到了计算的机械转速2177RPM。
计算公式如下:
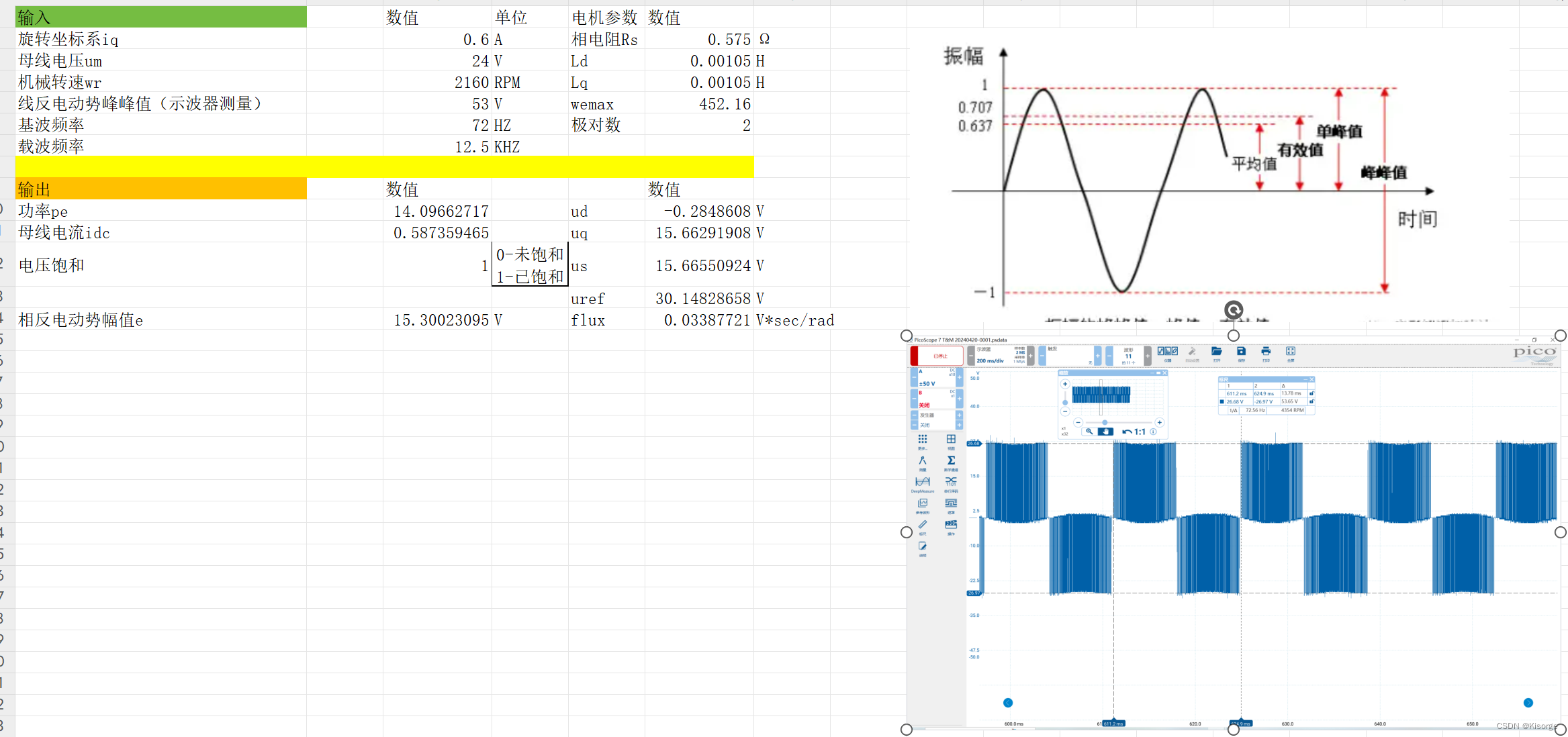
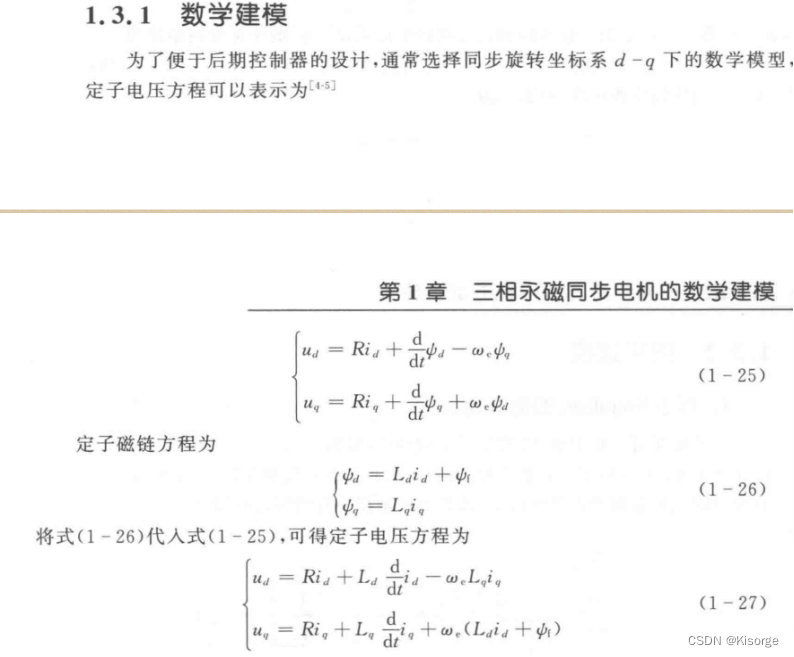
二、ud、uq、us
在上一节,我们已经把电机参数求出来了,例如反电动势系数,在求旋转坐标系下的uduq时,需要用到磁链,磁链与反电动势系数其实是一样的,代入公式即可
再通过dq电压平方和开根号求出us
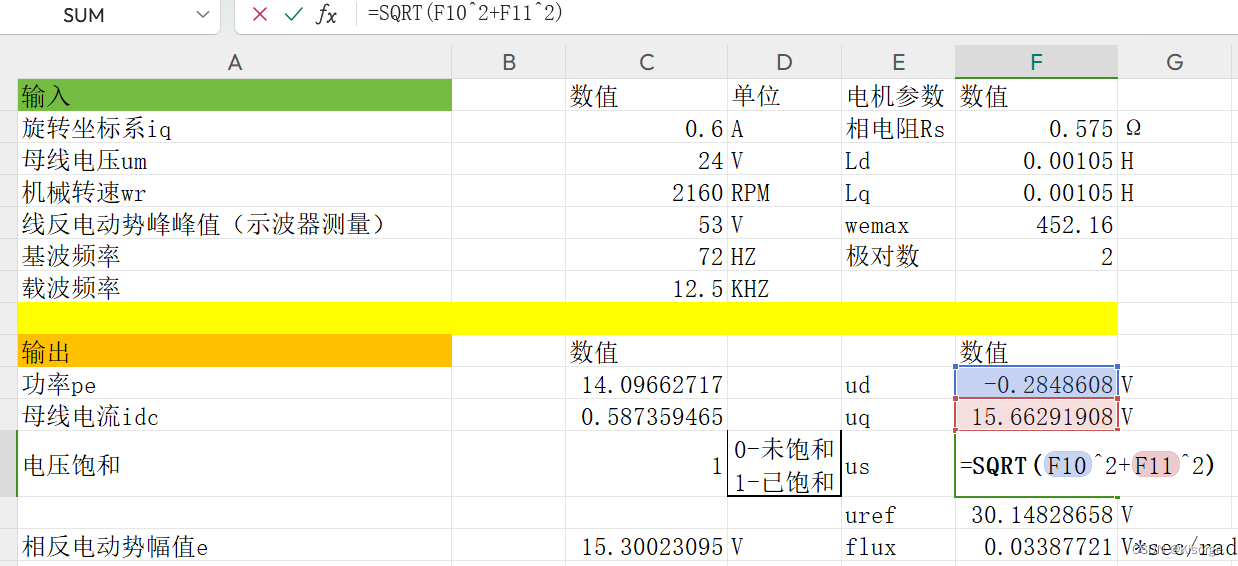
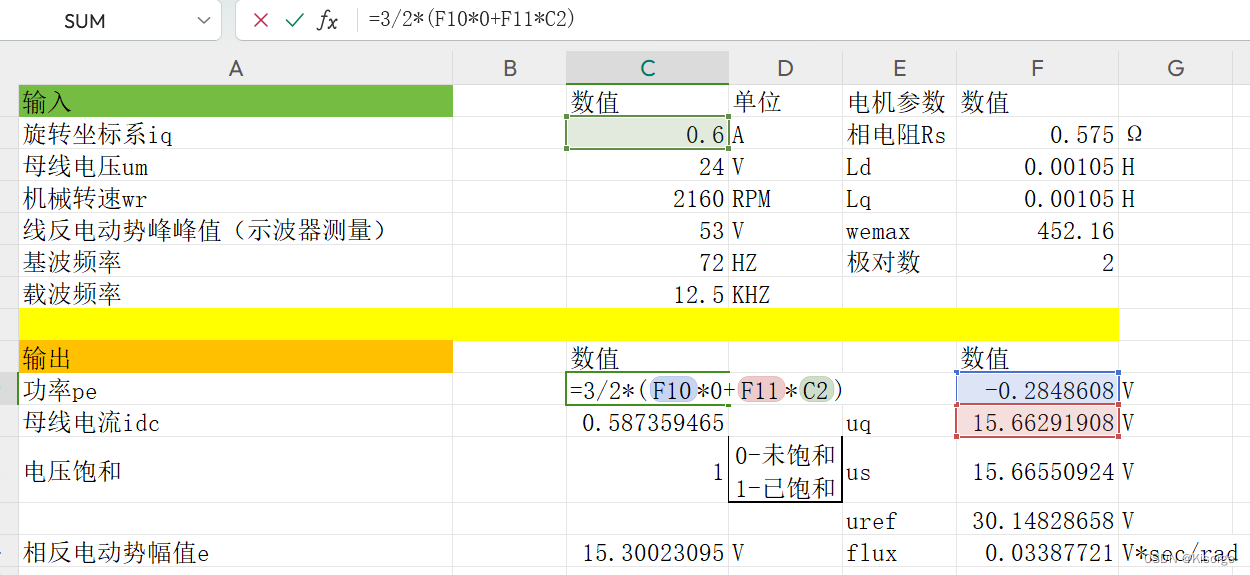
三、输出功率
输出功率与iq有关,因此需要把iq打印出来,要注意,此时的iq没有经过pi控制器,是反馈的iq,而不是输出的iq
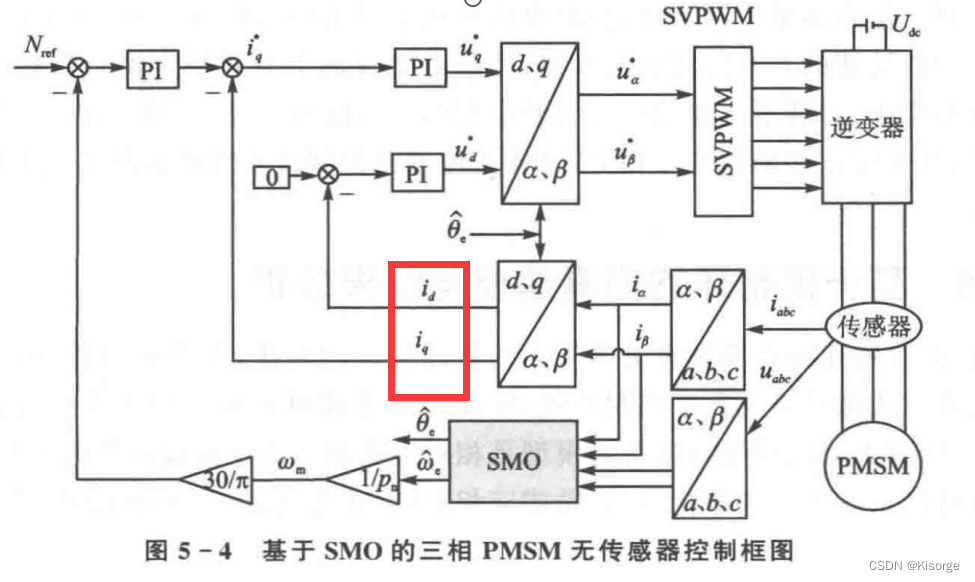
这个是反馈的iq
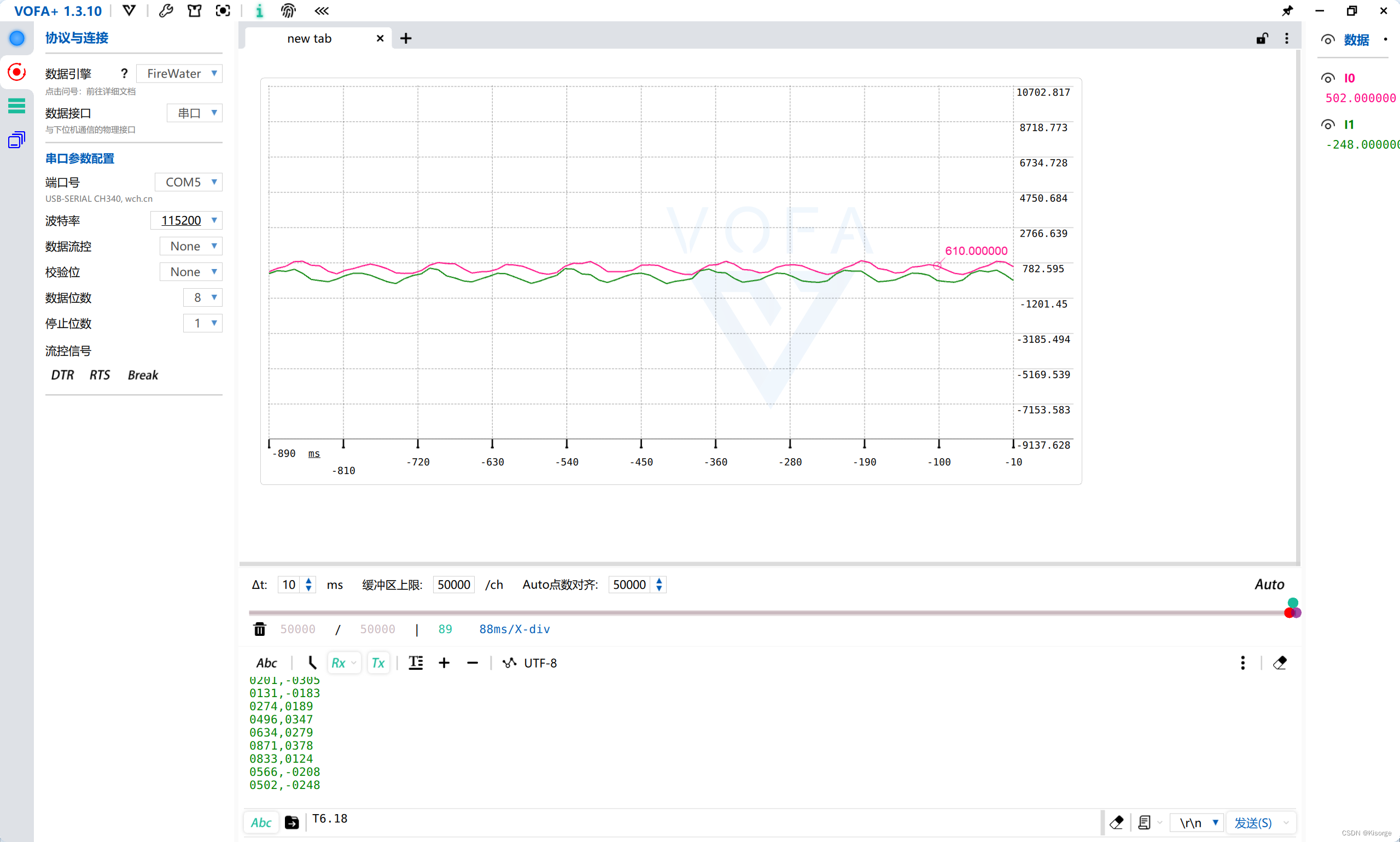
代入输出功率公式
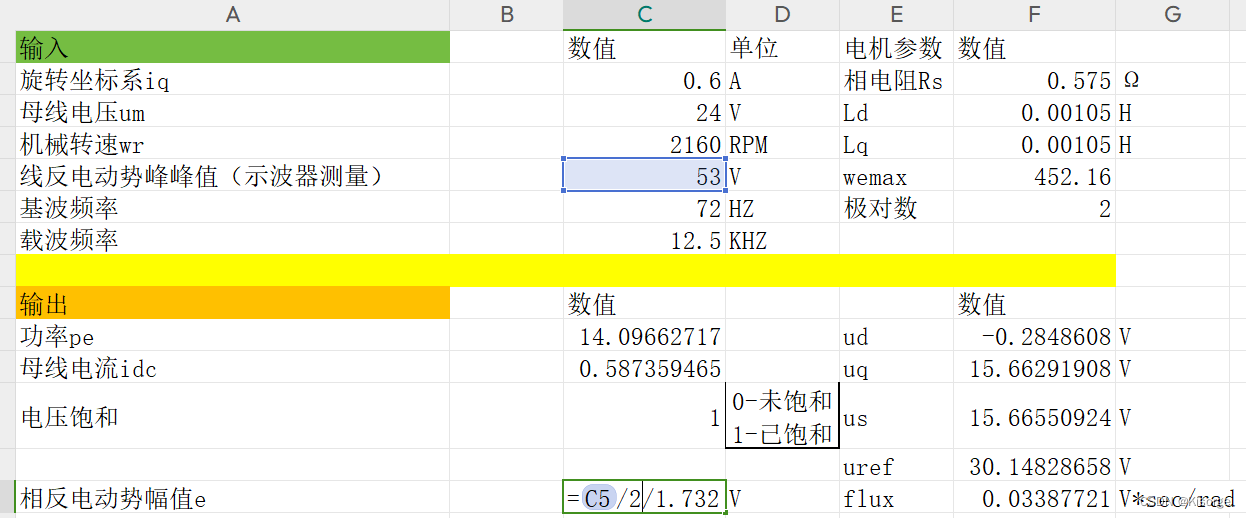
四、相反电动势幅值
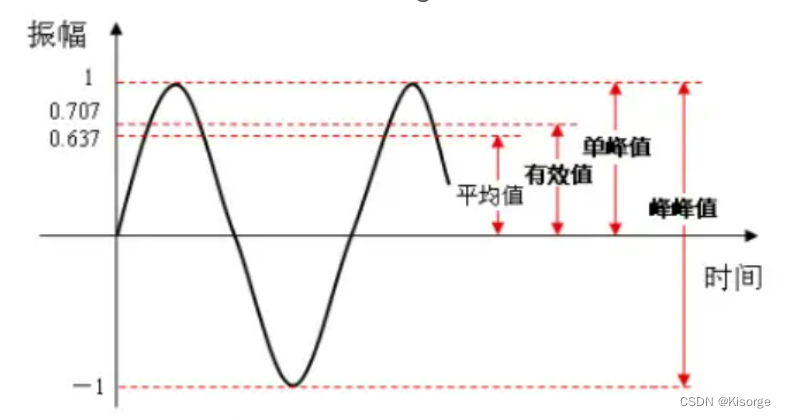
线反电动势峰峰值可以通过之前推算机械速度的波形看出,53V左右
再计算相反电动势幅值e
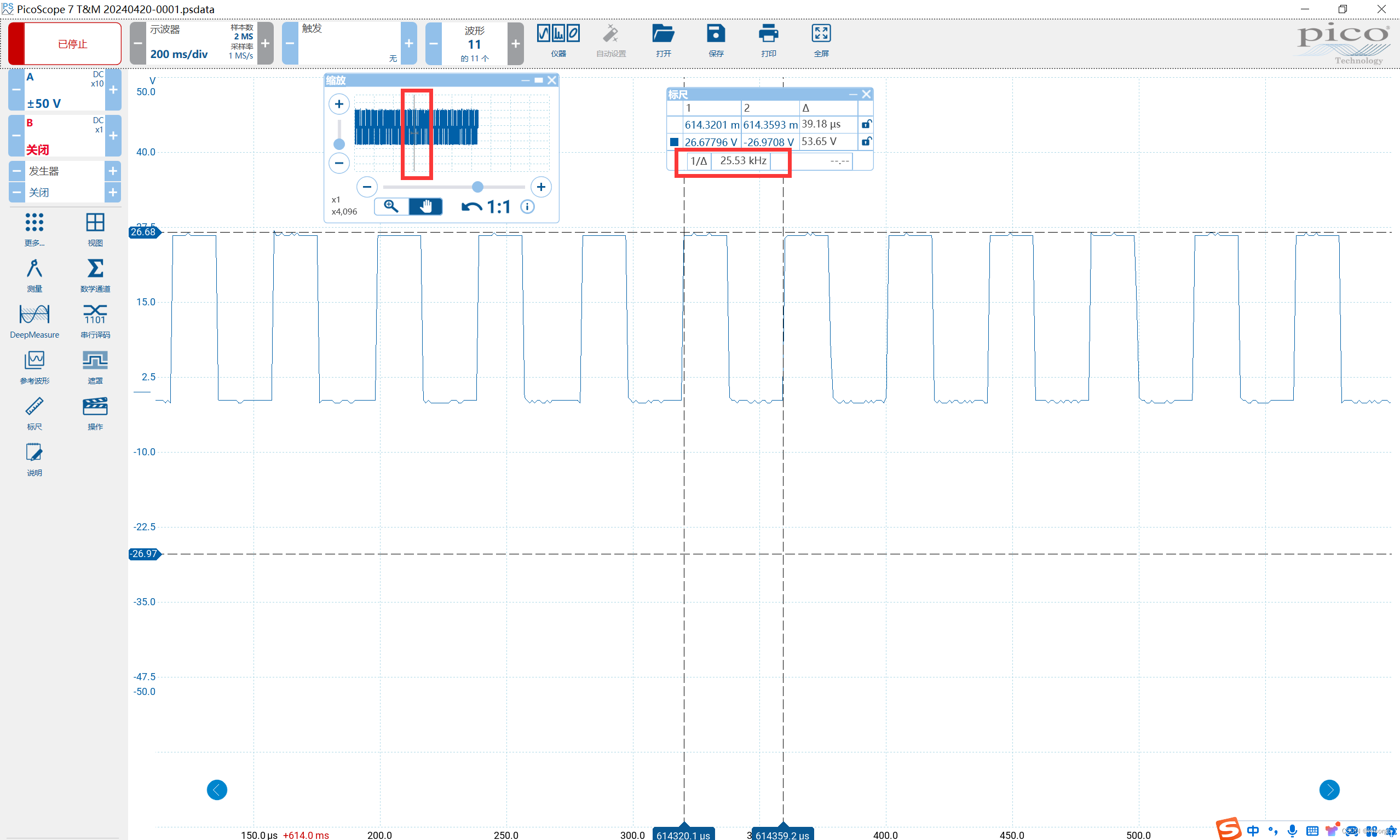
五、载波周期
还是将刚刚两相的反电动势波形,抓取一个载波周期,计算载波频率,此载波频率与开关频率一样,载波周期也叫开关周期。25Khz。
六、转矩常数
之前所用到的反电动势系数,是用相电动势计算得到的,
如果反电动势常数不用线电压表示,而用相电压表示,那么Kt =3Ke
七、参考资料
关于电机的标幺值
永磁同步电机的反电动势常数怎么算?
永磁同步电机反电动势常数,磁链怎么计算?
转矩系数与反电势系数
总结
本文仅仅简单介绍了【电机参数】直流无刷电机机械转速、ud、uq、us、输出功率、相反电动势幅值、载波周期、转矩常数方面,评论区欢迎讨论。
这篇关于【电机参数】直流无刷电机机械转速、ud、uq、us、输出功率、相反电动势幅值、载波周期、转矩常数的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



