foc专题

基于FPGA的开源项目:FOC/SHA/USB/JPEG等
文章目录 [1. USB 1.1控制器](https://github.com/WangXuan95/FPGA-USB-Device)[2. FOC控制算法](https://github.com/WangXuan95/FPGA-FOC)[3. BSV高级硬件描述语言入门指南](https://github.com/WangXuan95/BSV_Tutorial_cn)[4. 基于XDMA的
【电机控制】有感FOC之霍尔自学习
文章目录 前言1 霍尔自学习的目的2 霍尔自学习的流程3 定位角度时的设置 前言 PMSM(永磁同步电机)的FOC控制算法中,无论是有感还是无感,对于位置(电角度)的确定都是其中重要而不可或缺的一环。本文介绍有感FOC的前期准备工作,对霍尔自学习的过程和作用进行简要说明。 1 霍尔自学习的目的 霍尔自学习有两个主要目的: 第一,获取霍尔状态的顺序,并与转动方向对应。 第二

【电机控制】FOC学习路径(随笔)
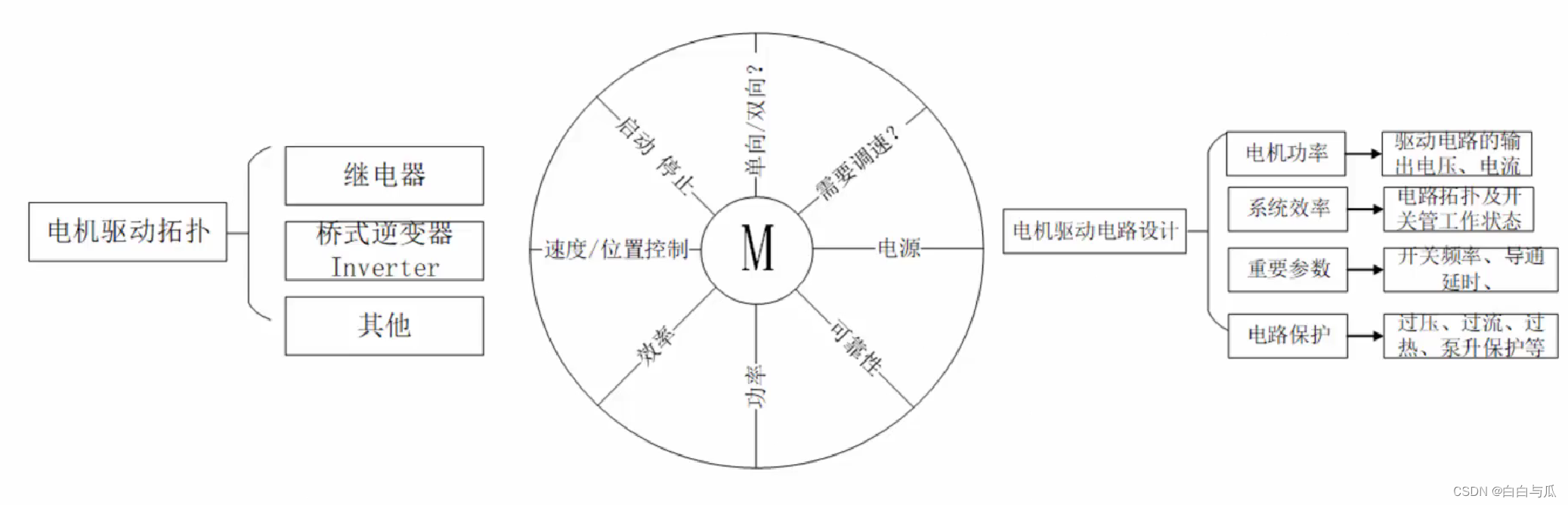
文章目录 前言1. 知识准备2. 应用场景3.入门学习 前言 回首学习之路,总结进阶之梯,希望能给后来者一点指引。 1. 知识准备 电机控制是电磁机械耦合的复杂非线性系统,在踏上进阶之路之前,我们需要先掌握必要的概念和术语。 主要分为以下几个方面: 1)电机基础知识,BLDC,PMSM,磁链,反电动势,霍尔等。 2)变频器,逆变器,开关电源,散热,效率。 3)基本硬
软件方案评审与模块优化:从FOC模块出发的电控平台建设
一、背景 洞悉模块发展趋势,定制行业应用特点,明确优化方向与阶段性目标 随着科技进步的飞速发展,模块化设计已成为众多行业产品开发的核心理念。无论是软件系统、硬件组件,还是复杂系统中的功能模块,都需要对其发展趋势、应用特点及优化方向进行深入了解和精确把握。本文将针对各类模块的特点、应用需求,以及其优化路径进行深入探讨,并结合当前阶段和未来发展规划,明确优化的目标、必要性、可行性、资源占用以及开发
【电机控制】FOC算法验证步骤——电流环PI参数、速度环PI参数
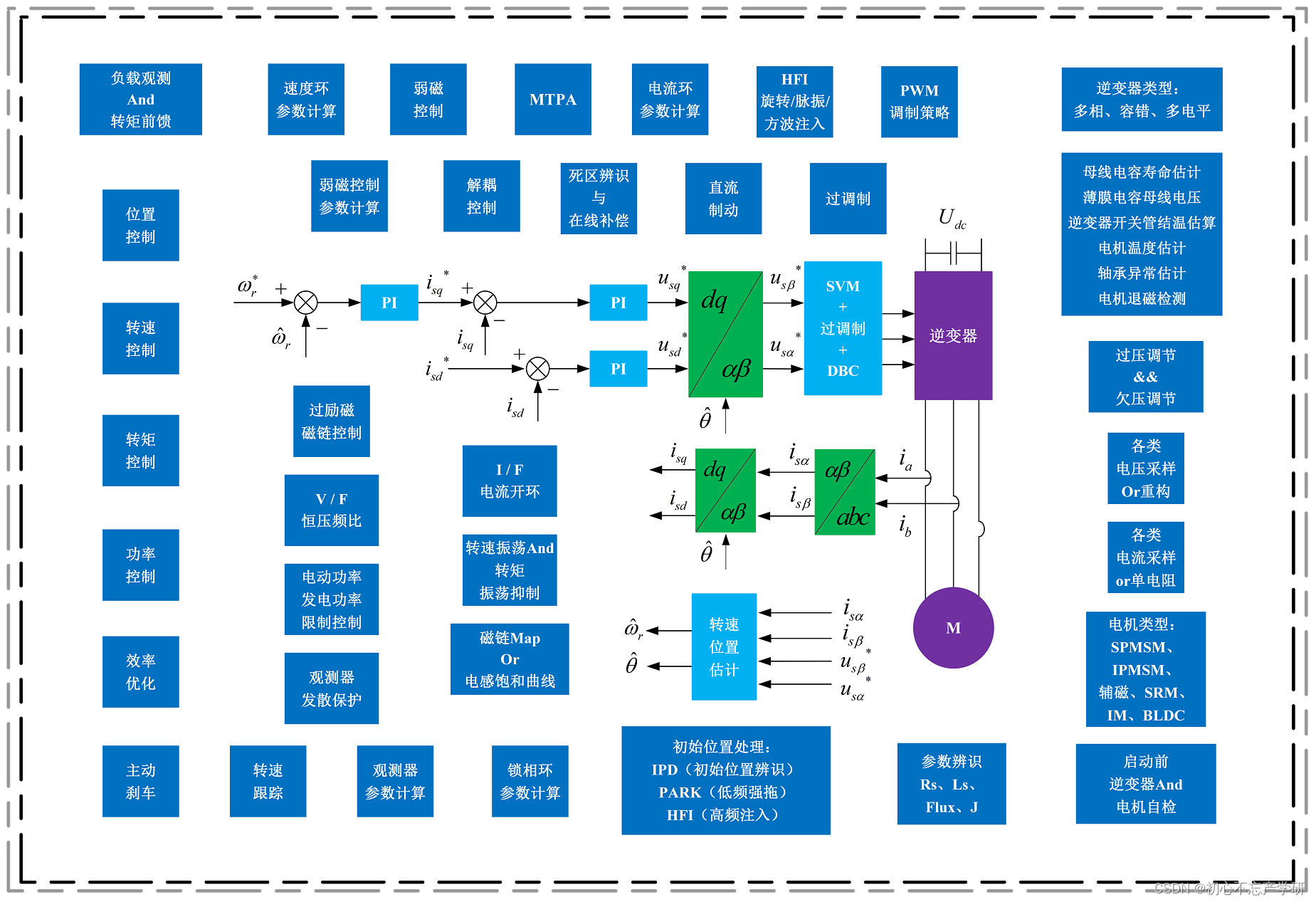
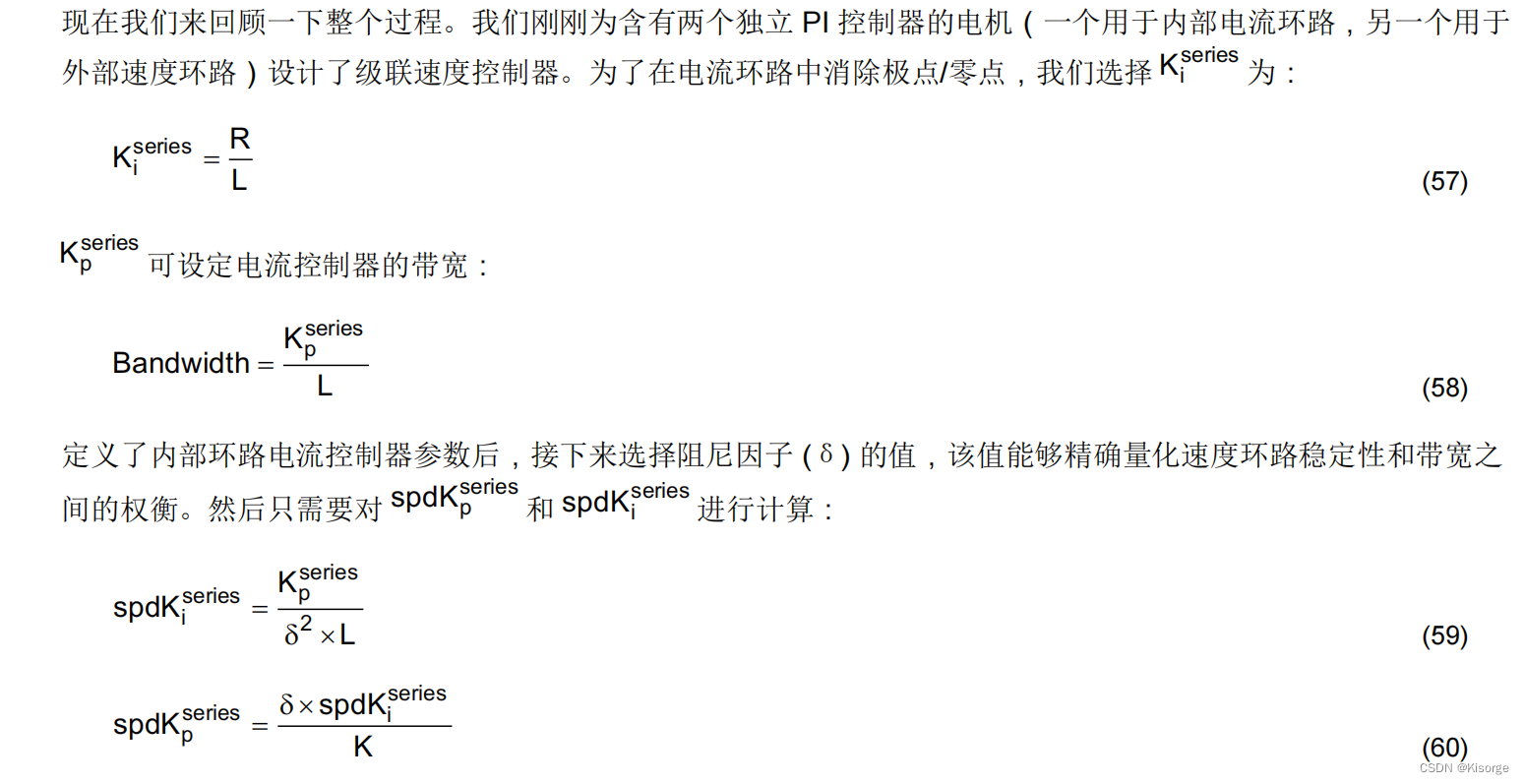
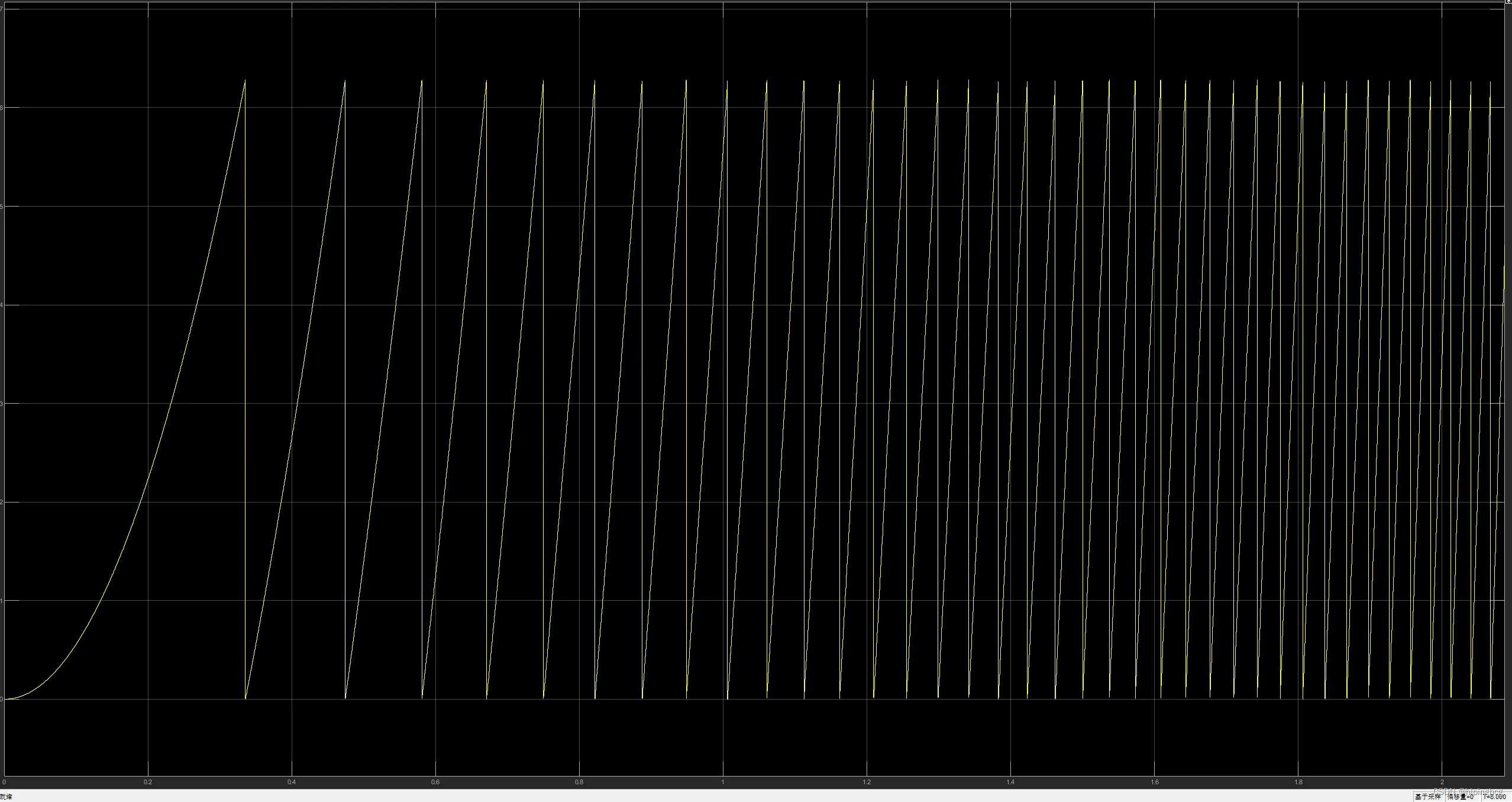
【电机控制】FOC算法验证步骤——电流环PI参数、速度环PI参数 文章目录 前言一、电流环PI1.TI手册 二、速度环PI1.TI手册——根据稳定性和带宽计算速度环PI参数2.TI手册——根据稳定性和带宽计算速度环PI参数 三、参考文献总结 前言 【电机控制】直流有刷电机、无刷电机汇总——持续更新 使用工具: 1.直流稳压电源:GPS305D(30V/5A) 2

基于双PI结构FOC闭环控制的永磁同步电机控制系统simulink建模与仿真
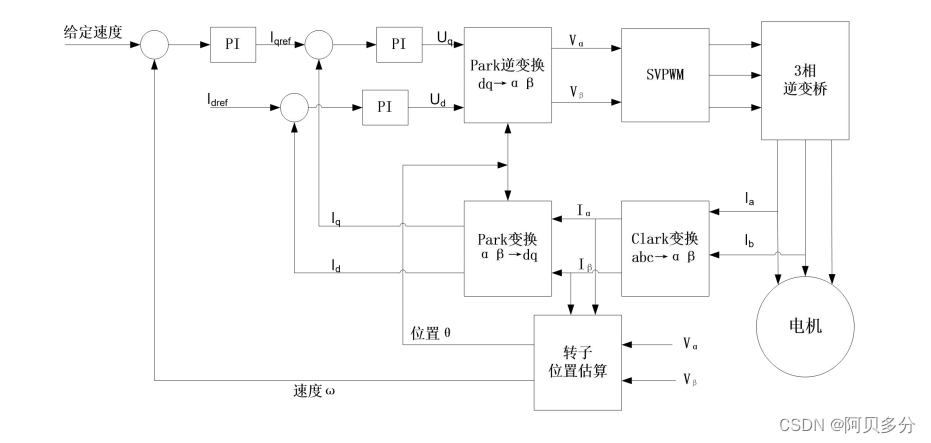
目录 1.课题概述 2.系统仿真结果 3.核心程序与模型 4.系统原理简介 5.完整工程文件 1.课题概述 基于双PI结构FOC闭环控制的永磁同步电机控制系统simulink建模与仿真。 2.系统仿真结果 3.核心程序与模型 版本:MATLAB2022a 64 4.系统原理简介 永磁同步电机(PMSM)基于双PI结构的磁场定向

有感FOC算法学习与实现总结
文章目录 基于STM32的有感FOC算法学习与实现总结1 前言2 FOC算法架构3 坐标变换3.1 Clark变换3.2 Park变换3.3 Park反变换 4 SVPWM5 反馈部分5.1 相电流5.2 电角度和转速 6 闭环控制6.1 电流环6.2 速度环6.3 位置环 写在最

基于M0 MCU的无感FOC航模电机控制
基于从零启动的无感FOC控制方法,实现了航模电机的高动态响应控制。 使用某M0芯片,20k开关频率,采样和中断计算无法倍频,整个FOC计算时间不超过33us。48V供电,满载60A,瞬态90A。 使用20k开关频率,航模电机电角频率1300Hz,波形正弦度高。 调试过程中,电角频率1000Hz,尝试10k开关频率,依然能获得较高的波形正弦度。动态响应依然不错,当然因为开关频率只有10k,电流的

嵌入式基础课程配套电机FOC伺服电机开发板AT32F403磁编码IMU姿态
嵌入式基础课程配套电机FOC伺服电机开发板AT32F403磁编码IMU姿态 带你入门嵌入式有二十多年开发经验的老技骨做技术支持整个开发包硬件包括电机2205,支持12V到24V宽输入,配套12V2A电源。包装原理图和PCB嵌入式软件嵌入式基础课程 带你入门嵌入式 电机FOC开发板、伺服电机开发板,带磁编码器,IMU、Jlink、串口,12V电源,源代码、原理图、PCB全套都给你

硬件FOC伺服控制芯片TMC4617适应永磁同步伺服/直流无刷伺服/直流有刷伺服/闭环步进/音圈电机
硬件FOC伺服控制芯片TMC4617适应永磁同步伺服/直流无刷伺服/直流有刷伺服/闭环步进/音圈电机 全球领先的嵌入式运动控制公司德国TRINAMIC MOTION CONTROL 将于近期推出其最新的伺服控制芯片TMC4671 TMC4671是一款完全集成伺服控制芯片,为直流无刷电机、永磁同步电机、2相步进电机、直流有刷电机和音圈电机提供磁场定向控制。 所有的控制功能都被集成在硬件上。
永磁同步电机无感FOC模型参考自适应(MRAS)转速估计算法
文章目录 1、前言2、模型参考自适应控制(MRAS)的基本原理分析2.1 模型参考自适应系统的分类2.2 模型参考自适应系统的设计思路2.3 波波夫(PopoV)超稳定性理论 3、永磁同步电机无位置模型参考自适应系统模型分析3.1 参考模型与可调模型的确定3.2 参考自适应律的确定3.3 仿真3.3.1 核心模块(在滑膜观测器、龙伯格、非线性磁链观测器基础上修改)3.3.2 仿真效果 参考
灯哥驱动器端口讲解----foc电机驱动必看
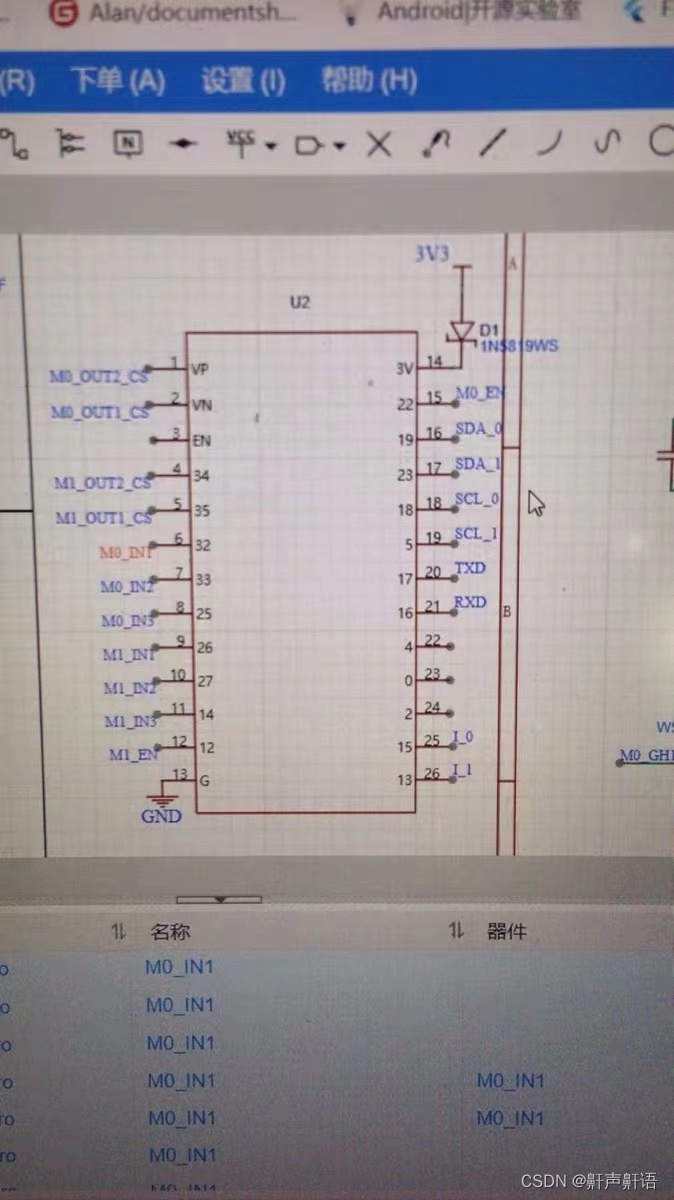
CS:是电流采样的引脚,三项采样电流,现在只给了两路,另外一路算出来就行了 in:三项电流输入,驱动电机使用。 en:没有用 SDA,SCL:I2C的引脚用来读取编码器的计数值 tx,rx:引出来了一路串口,没有用

二、永磁同步电机矢量控制(FOC)—不同坐标系下电机数学模型
1.电机数学模型 对于永磁同步电机,矢量控制算法是建立在电机的数学模型上,在不同坐标系下,电机数学模型也不同,主要分为自然坐标系ABC下的PMSM数学模型、两相静止坐标系aβ下的PMSM数学模型和两相旋转坐标系dq下的PMSM数学模型。 矢量控制中是进行磁场定向控制,包括转子磁场定向、定子磁场定向和气隙磁场定向。矢量控制基于转子磁场控制,直接转矩控制基于定子磁场定向

【电机控制】PMSM无感FOC控制(三)SVPWM
0. 前言 本章节会详细介绍SVPWM,计划在下一章讲解过调制。学完这一章你就会理解第一章里面PID控制器输出的dq轴电压经过变换后得到的αβ轴电压的真正含义,为什么会会输出αβ轴电压,αβ轴电压是怎么被SVPWM利用的。 之前我们讲过FOC是磁场定向控制,在进入SVPWM之前我们要清楚,这个定向的磁场是由什么产生的?怎么被控制的? 定向的磁场是由什么产生
永磁同步电机无感FOC(龙伯格观测器)算法技术总结-实战篇
文章目录 1、ST龙伯格算法分析(定点数)1.1 符号说明1.2 最大感应电动势计算1.3 系数计算1.4 龙伯格观测器计算1.5 锁相环计算1.6 观测器增益计算1.7 锁相环PI计算(ST)1.8 平均速度的用意 2、启动策略2.1 V/F压频比控制2.2 I/F压频比控制 3、算法开发3.1 Luenberger核心算法模块3.1.1 Luenberger.h3.1.2 Luenber
永磁同步电机无感FOC(龙伯格观测器)算法技术总结-仿真篇
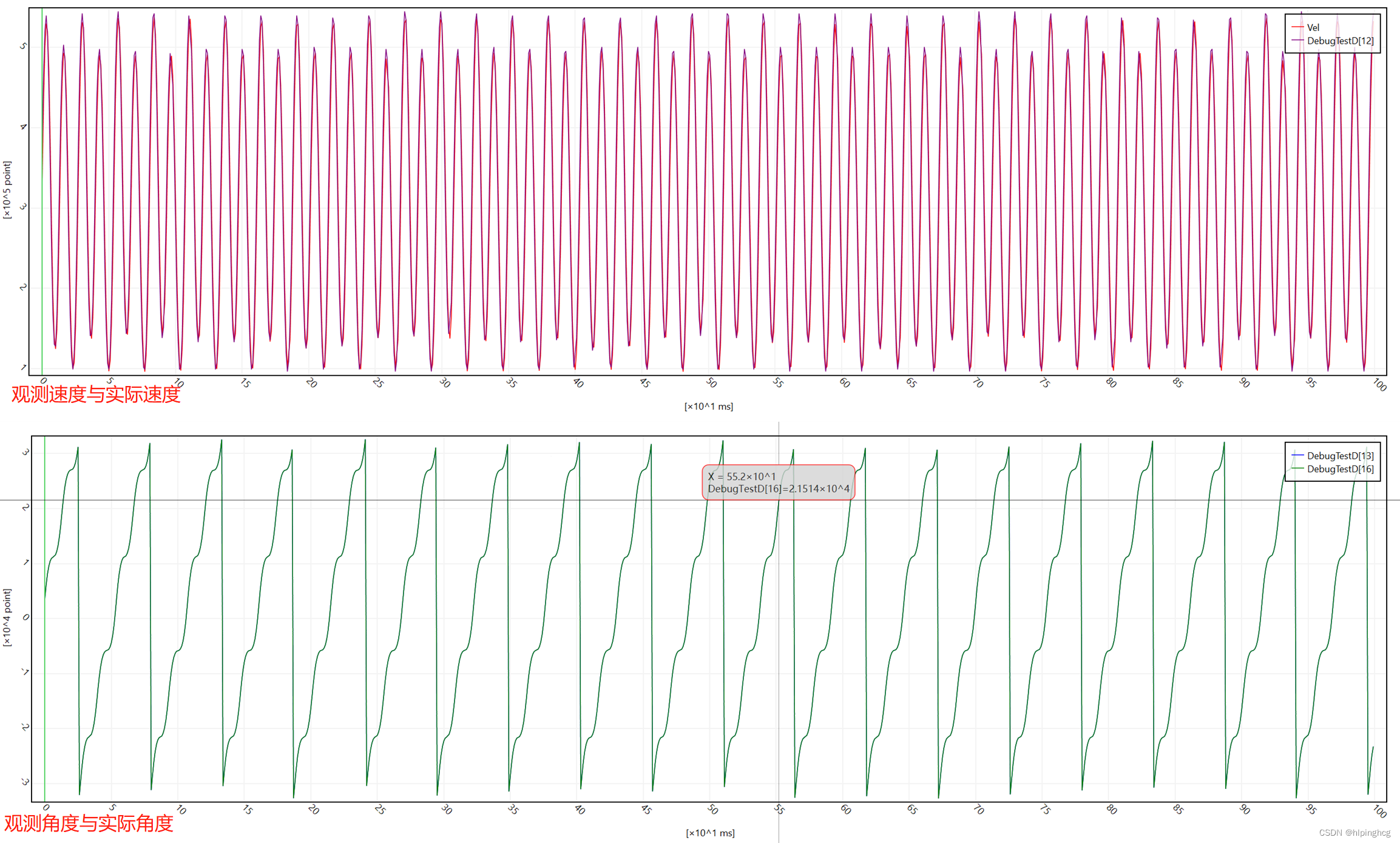
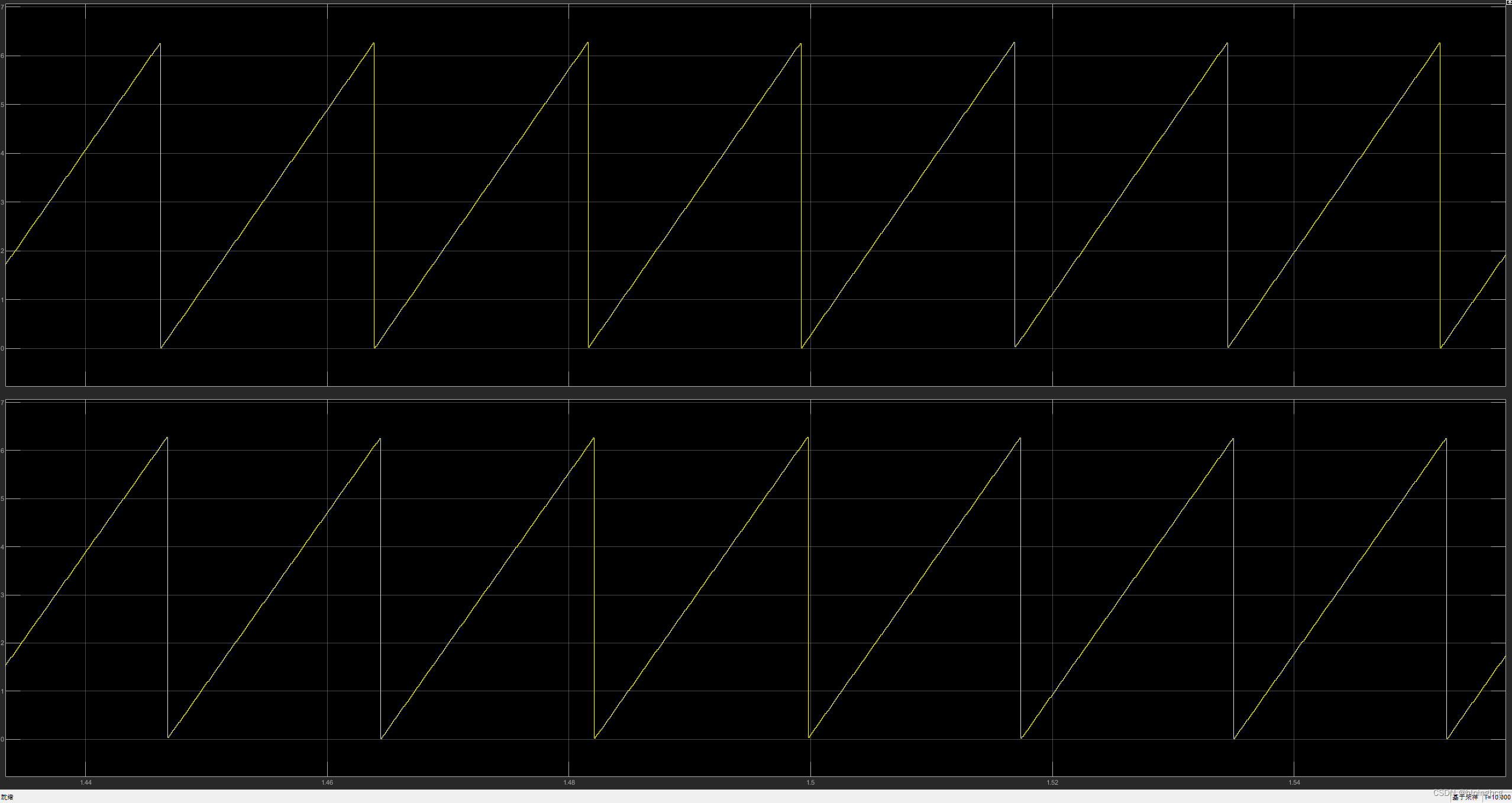
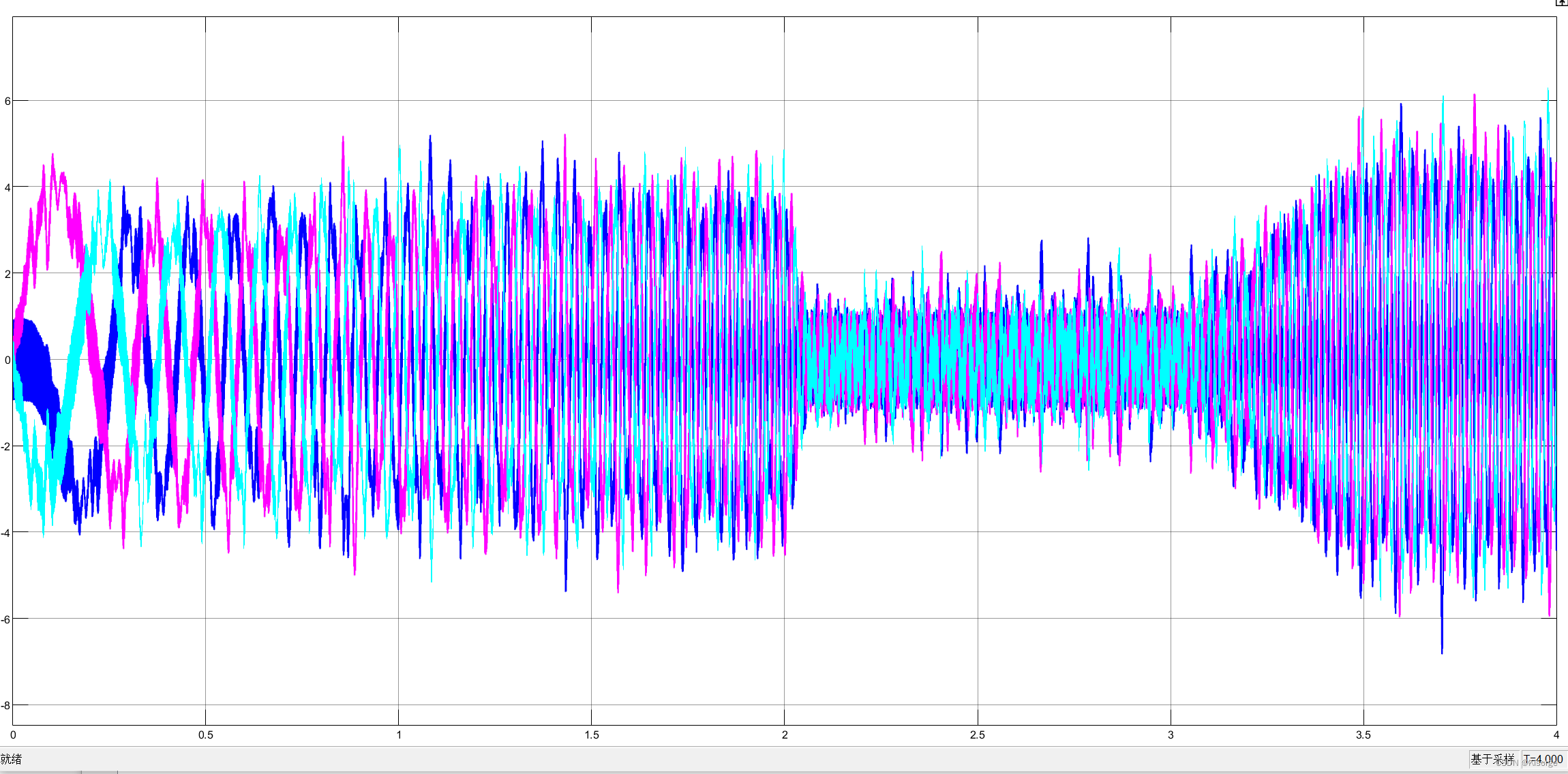
文章目录 1、观测器的引入2、β轴向下的电机观测器数学模型3、β轴向下的转子点角度及速度观测4、Simulink仿真模型搭建4.1模型总览4.2 Luenberger观测器模块4.2.1 I_alpha观测4.2.2 I_beta观测4.2.3 e_alpha、e_beta观测4.2.4 锁相环 4.3 速度设定4.4 速度观测结果4.5 电角度观测结果 模型下载地址:无感FOC
【电机仿真】HFI算法脉振高频电压信号注入观测器-PMSM无感FOC控制
【电机仿真】HFI算法脉振高频电压信号注入观测器-PMSM无感FOC控制 文章目录 前言一、脉振高频电压注入法简介(注入在旋转坐标系的d轴)1.旋转高频电压(电流)注入法2.脉振高频电压注入法 二、高频注入理论1.永磁同步电机的高频模型2.估计坐标系3.上式联立得到4.在估计的两相旋转坐标系的直轴上注入高频余弦电压信号5.将4代入3可得6.PI调节器的输入量计算7.脉振高频电压注入法
BLDC电机FOC调试入门1
一、无感和有感 有感是指:电机内部有霍尔传感器感应转子的状态和位置 无感是指:电机内部是通过电调反电动势信号判断转子位置换相。 有感电机在静止的状态下就能知道转子的位置,无感电机需要转动起来才能判断转子的位置因此起步的时候会抖,而且低速状态下比较难控制。 二、FOC FOC(Field Oriented Control)

STM32CubeMX FOC工程配置(AuroraFOC)
一. 简介 哈喽,大家好,今天给大家带来基于AuroraFOC开发板的STM32CubeMX的工程配置,主要配置的参数如下: 1. 互补PWM输出 2. 定时器注入中断ADC采样 3. SPI配置 4. USB CDC配置 5. RT Thread配置 大家如果对这几部分感兴趣的话,可以往下继续阅读。(对开发板感兴趣的话,可以私聊(WX:WU15674146)我购买) 二. STM32
【无刷电机学习】驱动原理及FOC控制精讲(持续更新中...)
目录(2024.02.23版) 0 参考出处 1 定义 2 各电机比较 3 基本原理 3.1 单相无刷电机 3.2 三相无刷电机 4 驱动方法 4.1 六步换相控制 4.1.1 基本原理 4.1.2 系统框图(待更新) 4.1.3 PWM调速(待更新) 4.1.4 速度和扭矩波动原因 4.2 正弦波控制 4.3 磁场定向控制(FOC)(更新ing) 4.3.1 定义
FOC--有感--clion
配置CLion用于STM32开发【优雅の嵌入式开发】 - 知乎 TIM1_CH3N是TIM1_CH3的互补输出通道。TIM1是一个高级定时器,具有互补输出功能。TIM1_CHx是PWM的主通道,而TIM1_CHxN则是PWM的互补输出通道。 开漏输出和推挽输出: 输出电平能力: 推挽输出:可以输出高电平和低电平。当推挽输出的一个GPIO引脚输出高电平时,该引脚会通过一个上拉电阻连接到V
DRV8313和L298N都是电机驱动,一个是驱动三相FOC无刷直流电机的,一个是驱动有刷电机,使stm32控制无刷电机简单入门知识
DRV8313和L298N都是电机驱动器,但它们之间存在一些关键的区别: DRV83131: 由德州仪器(TI)制造。 具有集成的场效应晶体管(FET)。 最大电压为65V。 峰值电流为3A。 适用于三相电机驱动。 L298N2: 由STMicroelectronics制造。 是一种高压,高电流的双全桥驱动器。 设计用于接受标准的TTL逻辑电平,并驱动诸如继电器,电磁阀,直流电机和步进电机等
给大家推荐一款非常好用的双路FOC开发板(AuroraFOC)
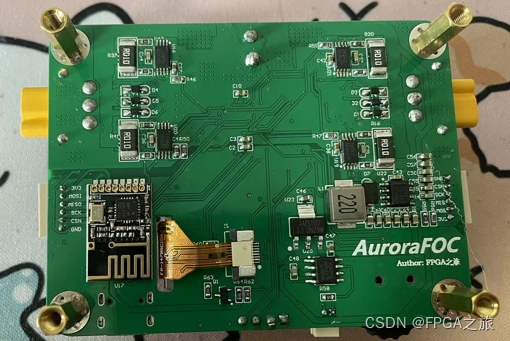
一. 简介 本次给大家介绍的是一款AuroraFOC开发板,尺寸非常小只有80*60的大小,而且板载资源非常丰富,非常适合用来学习,和DIY一些小项目,无论是用在毕设上,还是找工作上,它将会是你最佳的助力板。 作者:公众号 FPGA之旅 二. PCB介绍 STM32F405RGT6 主控两路FOC电机驱动,支持MR30和SH1.0两种接口,四路电流采样电路 ,两路SPI/IIC编码器接口U
stm32 FOC从学习开发(四)svpwm算法(1)
系列文章目录 ` 一、stm32 FOC从零学习开发(一)FOC概念 二、stm32 FOC从学习开发(二)Clark变换与MATLAB仿真 三、stm32 FOC从学习开发(三)park变换与MATLAB仿真 四、stm32 FOC从学习开发(四)svpwm算法(1) 五、stm32 FOC从学习开发(五)svpwm算法(2) 六、stm32 FOC从学习开发(六)基于均值零序分量注入的载波S

【电机控制】PMSM无感FOC控制(九)无感启动
0. 前言 终于到了FOC无感入门的最后被一个章节了,无感foc的启动其实很好理解,分为三个阶段:转子定位、I/F强拖、电流转速双闭环。 1. 无感foc启动 (1)转子定位阶段: 首先将q轴电流设定一个能将转子拖动的值Iq_force,Id给0,角度给0,进行反park变换和SVPWM,产生一个固定的磁场将转子拖动到初始位置,然后切换到I/F强拖阶段。